您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
ICE(Internet Communications Engine)是一种面向对象的中间件平台,主要用于网络通讯。它为面向对象的“客户端-服务器”模型的应用提供了一组很好的工具和API接口。目前在全世界被应用于很多项目之中。ICE中间件号称标准统一,开源,跨平台,跨语言,分布式,安全,服务透明,负载均衡,面向对象,性能优越,防火期穿透,通讯屏蔽。因此相比Corba,DCOM,SOAP,J2EE等的中间件技术,自然是集众多优点于一身,而却没有他们的缺点。
在官网下载第三方中间件资源,ZeroC ICE的官方下载网站为:https://zeroc.com/downloads/ice#source。本文中使用的版本是V3.7,下载后解压文件,文件目录如图 2.1所示。
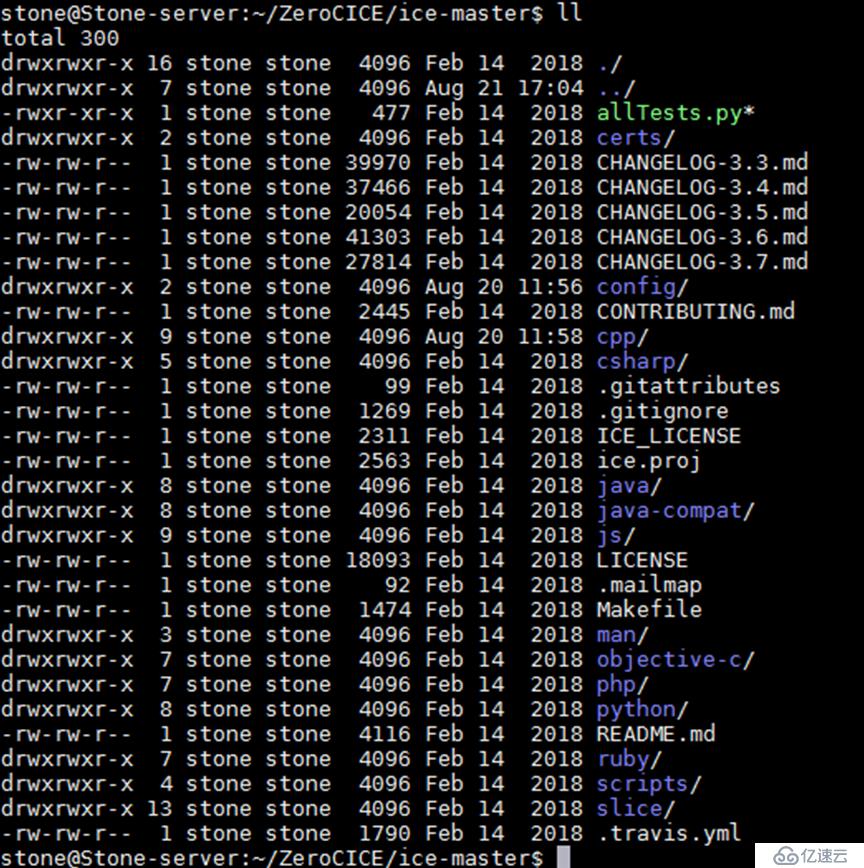
图2.1 Ice源码解压后的文件
cpp/、csharp/、java/、js/、objective-c/、php/、python/等目录包含了对应语言的Ice库实现代码,config/目录中存放控制编译方式的相关配置文件,slice/中存放了slice相关工具的代码实现。
ICE支持多种语言,并且默认情况下会编译所有语言支持。这里只需要移植C++相关代码,需要修改config/Make.rules中的supported-languages属性,删除不需要的语言支持只保留C++支持,如图 3.1所示。

图 3.1 supported-languages属性修改
修改配置文件后直接在根目录make即可进入编译过程。为了方便后期的移植工作,这里使用V=s选项打印编译详细过程并保存到Make.log文件中,命令:# make V=s > Make.log。编译结束后查看Make.log内容确认编译成功。
本次移植仅移植C++支持部分的ICE主库即libIce.so,因此只需要使用到cpp目录下的代码文件。由于是C++代码,在创建工程时需要选中C++工程选项。ICE主库代码编译需要依赖libbz2,也需要提前准备。
在Real-Evo IDE中创建libIce的动态库工程。创建时选中C++工程选项并打开专家模式,如图 4.1所示。
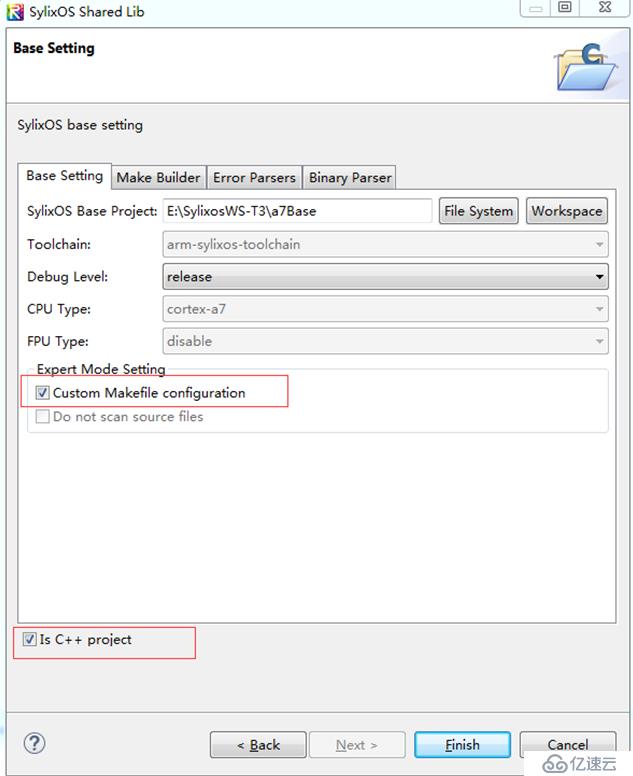
图 4.1 创建工程选项
删除src目录下的libIce.c文件,导入源码包中的cpp/目录下与主库相关的代码文件。这里需要注意的是很多代码文件是编译过程中使用slice工具创建的,因此需要在linux环境下编译成功后才能导出所有的文件。其中包括目录cpp/include/generated/Ice/、cpp/include/Ice/、cpp/include/IceUtil/、cpp/src/Ice/、cpp/src/IceUtil/。最终的目录结构如图 4.2所示。
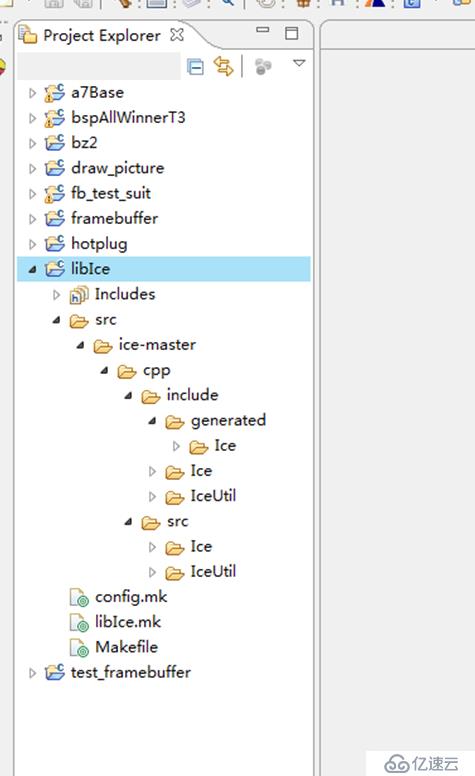
图 4.2 Ice代码目录结构
分析Make.log中编译libIce.so的过程,罗列出所有需要编译的cpp文件,并逐一加入LOCAL_SRCS中,如图 4.3所示。
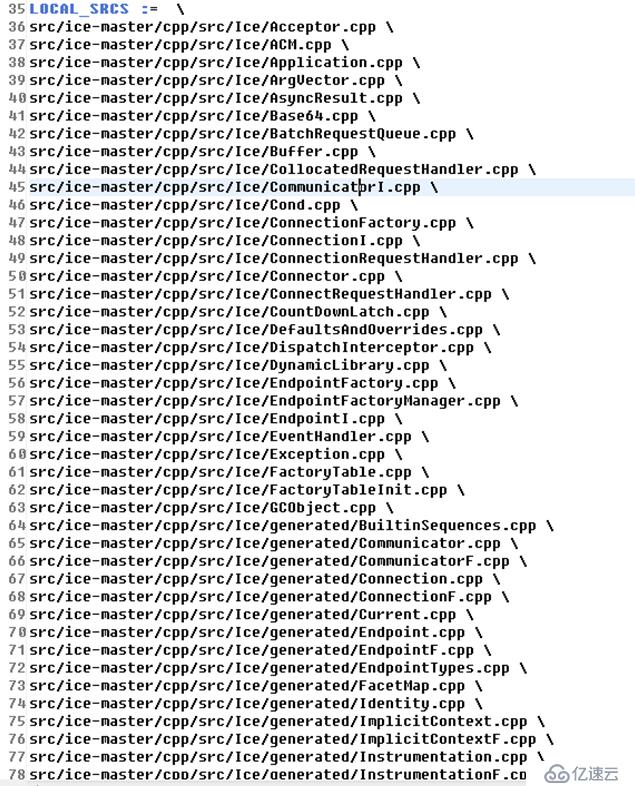
图 4.3 添加cpp文件
添加相关的头文件搜索目录,其中包括libbz2的工程路径,如图 4.4所示。

图 4.4 头文件搜索路径
添加宏配置,如图 4.5所示。
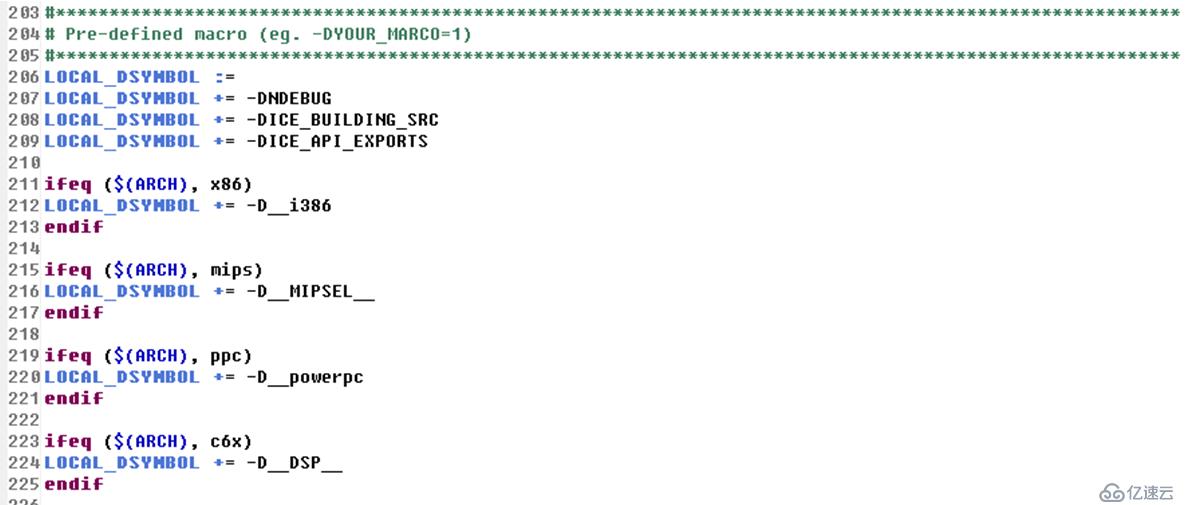
图 4.5 添加宏配置
添加编译选项,如图 4.6所示。
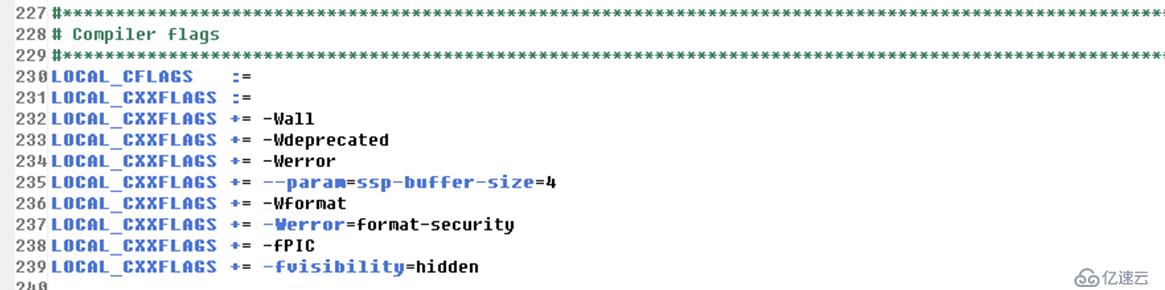
图 4.6 添加编译选项
添加依赖库,包括对libbz2库的依赖,如图 4.7所示。

图 4.7 添加依赖库
打开C++编译扩展,如图 4.8所示。

图 4.8 打开C++编译扩展
默认编译会出现若干编译错误,需对部分代码进行修改,具体修改内容如下:
修改src/ice-master/cpp/src/Ice/Cond.cpp,使用CLOCK_REALTIME模式或是时间信息,如图 4.9所示。
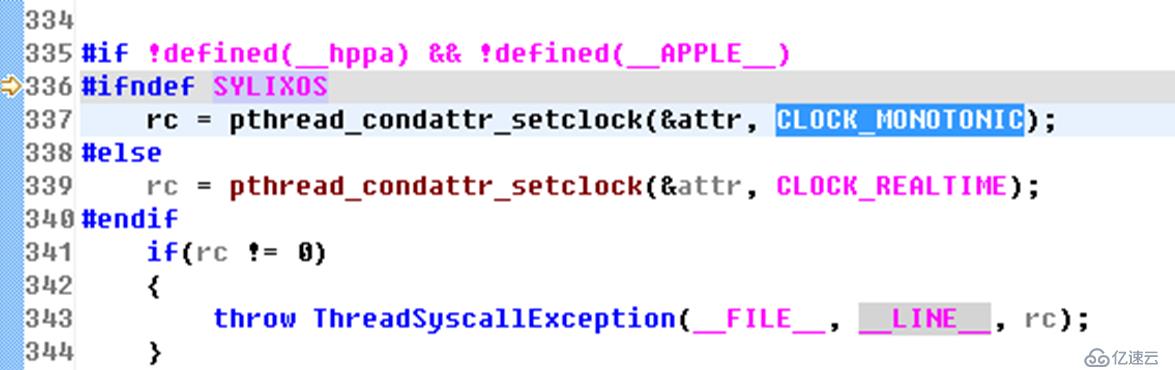
图 4.9 修改获取时间方式
修改src/ice-master/cpp/include/IceUtil/Config.h,增加DSP大小端配置,如图 4.10所示。
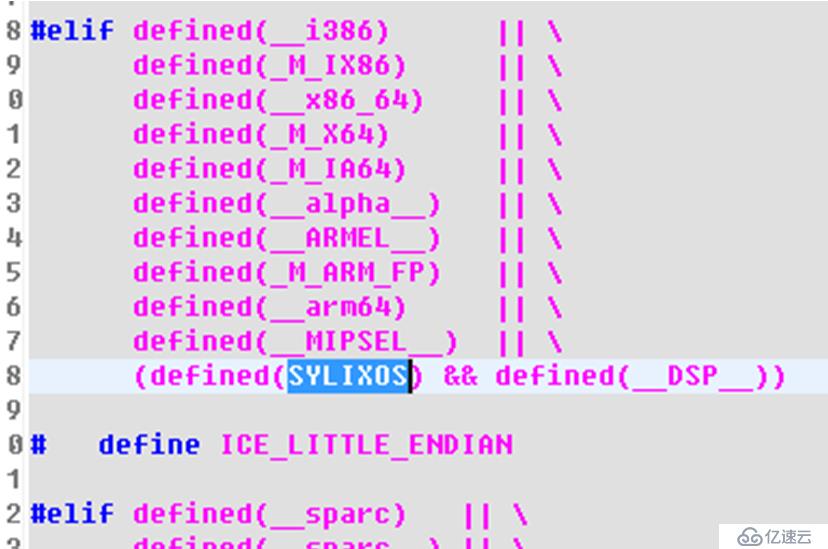
图 4.10 DSP大小端配置
修改src/ice-master/cpp/include/Ice/Service.h,DSP中interrupt符号冲突,更改为interrupt2,如图 4.11所示。
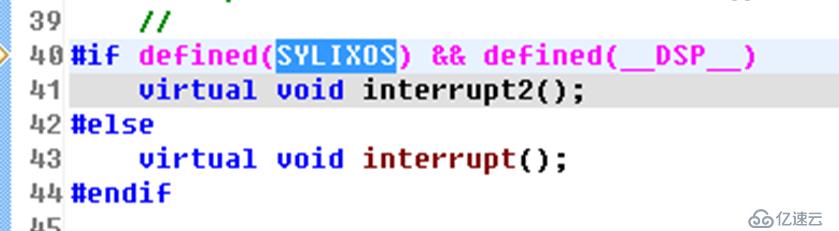
图 4.11 interrupt符号冲突
修改src/ice-master/cpp/include/IceUtil/Config.h,消除DSP中GNUC版本错误,如图 4.12所示。
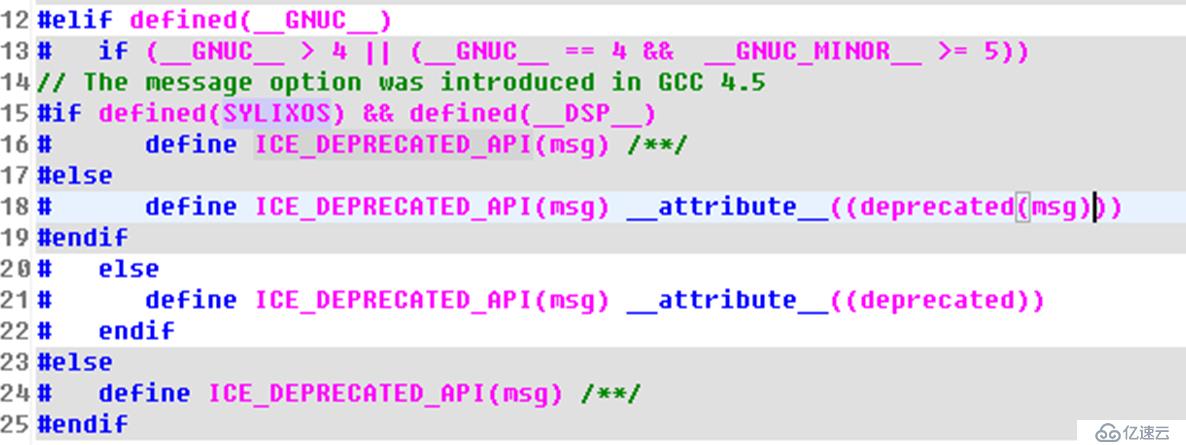
图 4.12消除GNUC版本错误
修改src/ice-master/cpp/src/Ice/DynamicLibrary.cpp,DSP中删除动态库相关操作,如图 4.13所示。
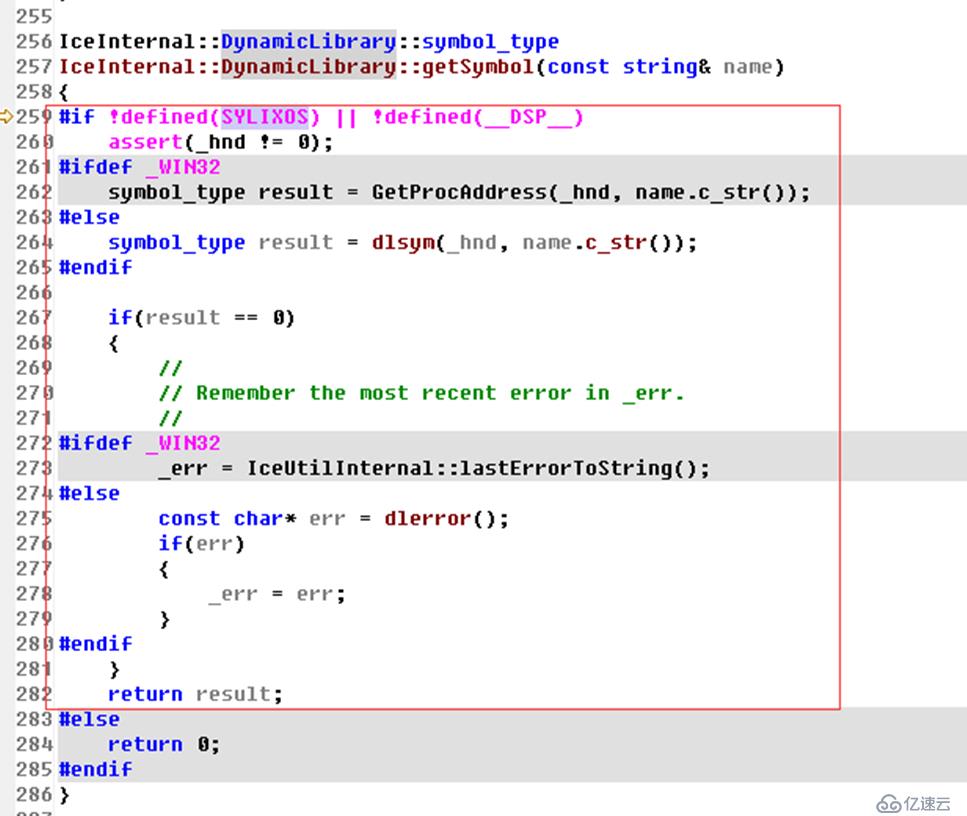
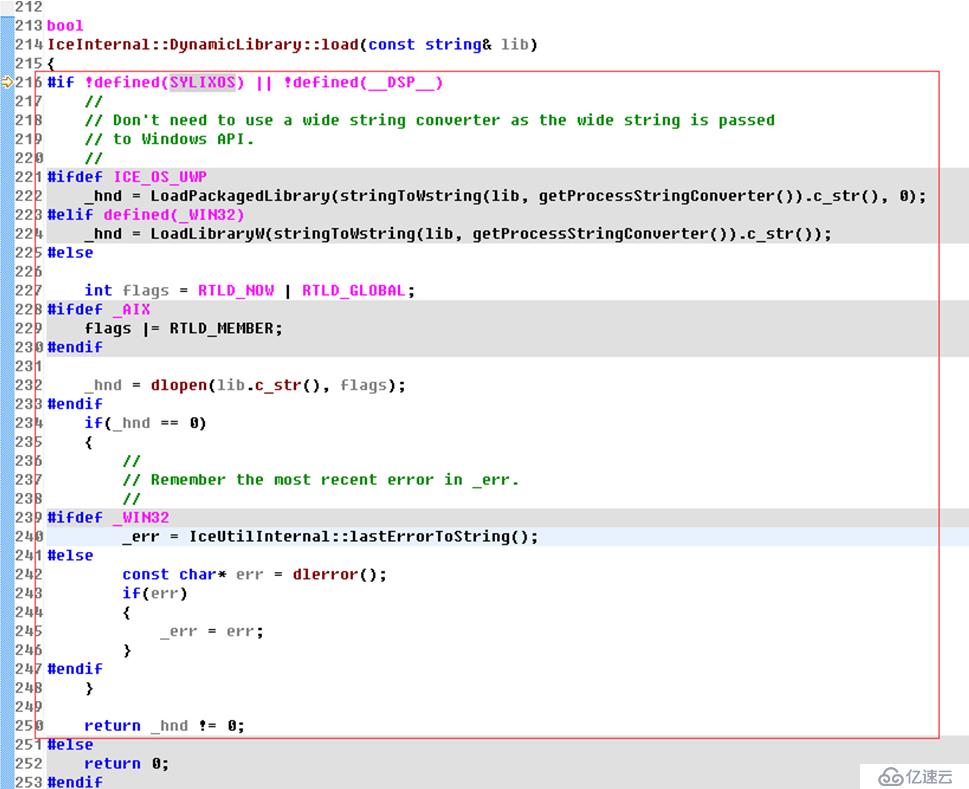
图 4.13 DSP中删除动态库相关操作
修改src/ice-master/cpp/src/Ice/Instance.cpp,增加头文件grp.h,如图 4.14所示。

图 4.14增加头文件grp.h
修改src/ice-master/cpp/src/Ice/MetricsAdminI.cpp,DSP中增加部分缺失接口,如图 4.15图 4.16图 4.17所示。
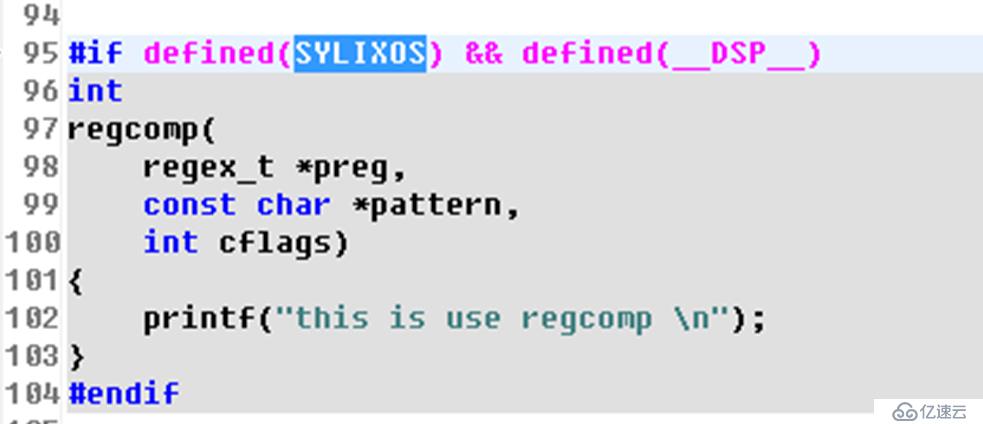
图 4.15 DSP中增加部分缺失接口
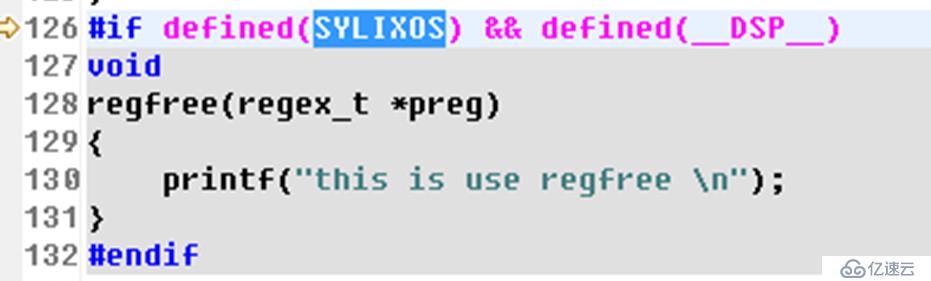
图 4.16 DSP中增加部分缺失接口
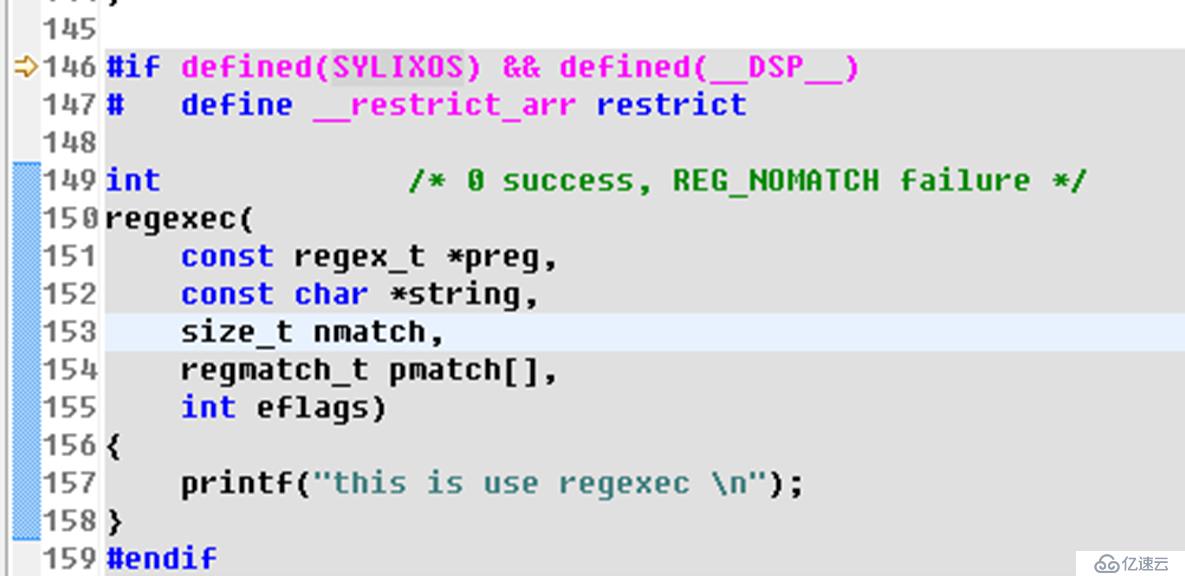
图 4.17 DSP中增加部分缺失接口
src/ice-master/cpp/src/Ice/Network.cpp,DSP中增加缺失的部分接口,如图 4.18图 4.19图 4.20图 4.21图 4.22所示。
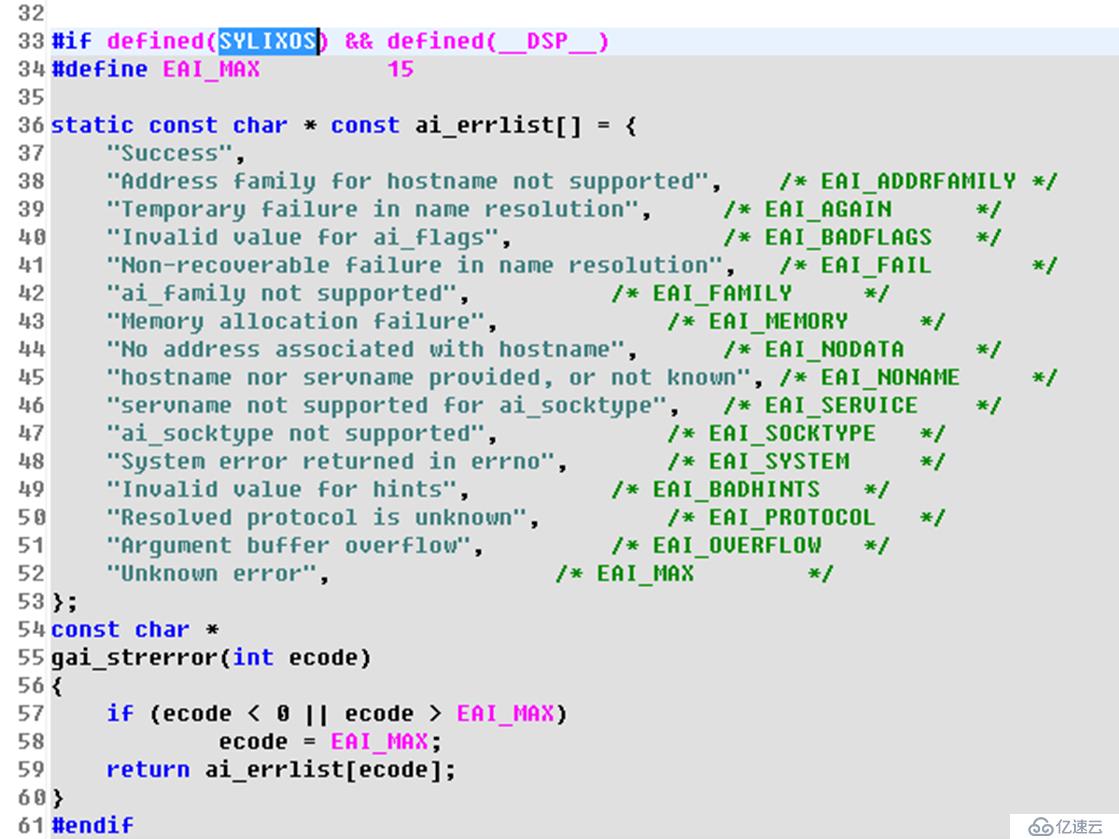
图 4.18 DSP中增加缺失的部分接口
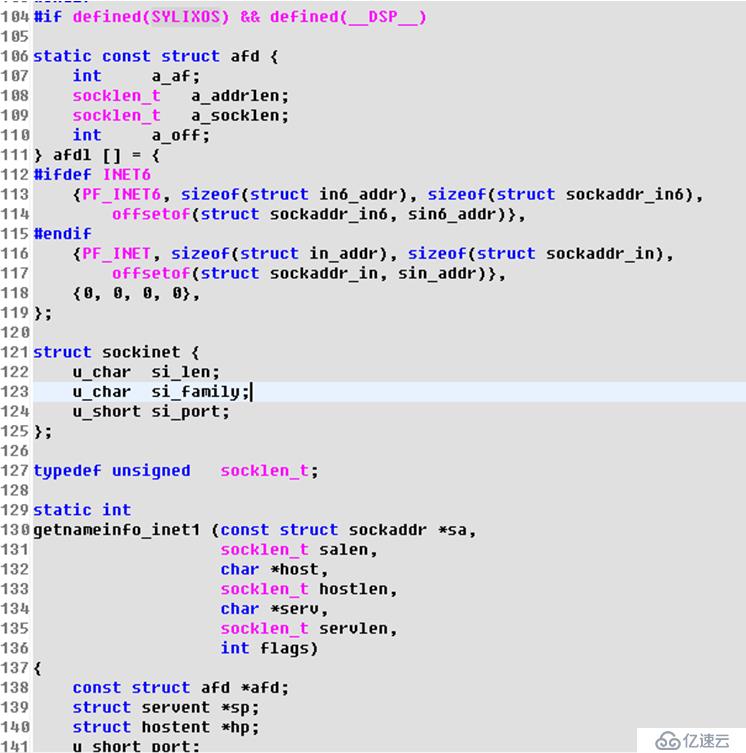
图4.19 DSP中增加缺失的部分接口

图 4.20 DSP中增加缺失的部分接口

图 4.21 DSP中增加缺失的部分接口

图 4.22 DSP中增加缺失的部分接口
src/ice-master/cpp/src/Ice/Service.cpp,删除fork调用相关代码,如图 4.23所示。
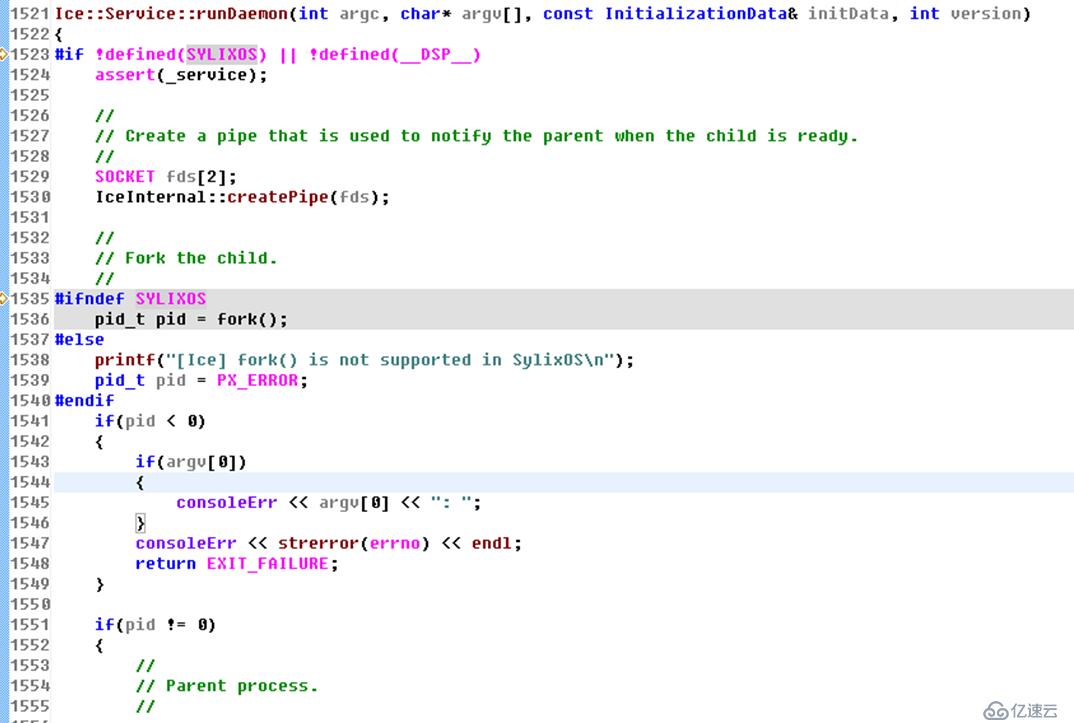
图 4.23删除fork调用相关代码
src/ice-master/cpp/src/Ice/Thread.cpp,纠正pthread_join返回值差异,如图 4.24所示。
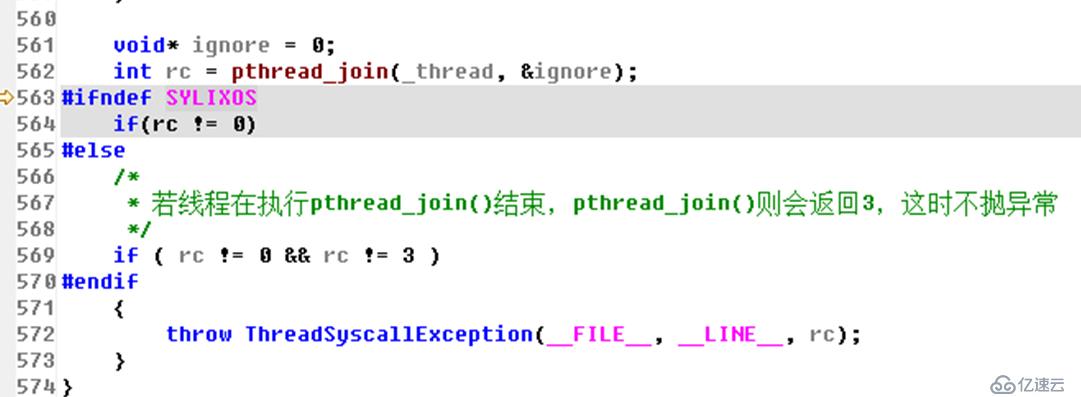
图 4.24纠正pthread_join返回值差异
src/ice-master/cpp/src/IceUtil/RecMutex.cpp,纠正pthread_mutex_trylock返回值差异,如图 4.25所示。
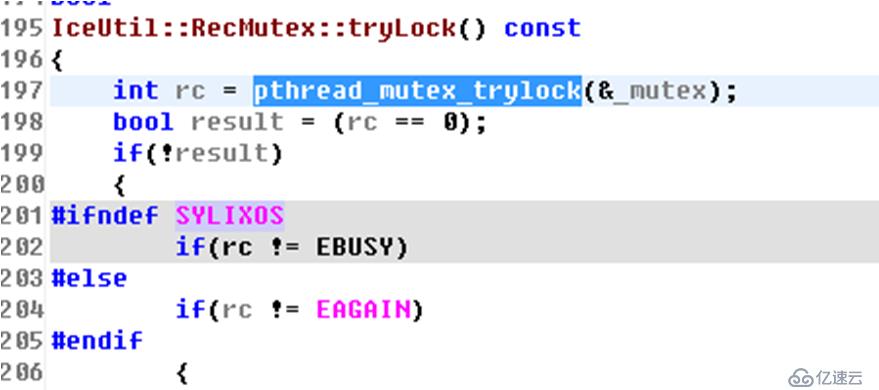
图 4.25纠正pthread_mutex_trylock返回值差异
src/ice-master/cpp/src/IceUtil/UtilException.cpp,DSP中使用strdup代替接口__cxa_demangle,如图 4.26所示。

图 4.26 DSP中使用strdup代替接口__cxa_demangle
ICE应用架构是服务器客户端模式,包括服务端和客户端两部分代码。客户端和服务器代码由slice工具所生成的接口代码联系到一起。下面使用ICE运行一个简单的helloworld测试例程。
编写接口代码demo.ice,如程序清单 5.1所示。
程序清单 5.1 demo.ice
module demo
{
interface printer
{ void printerstr(string msg);
};
};在linux中使用ICE源码中编译生成的slice工具生成接口代码:
# cpp/bin/slice2cpp demo.ice
可在当前目录中生成接口代码demo.cpp、demo.h。
在RealEvo-IDE中创建应用工程,导入代码demo.cpp、demo.h,并创建代码文件server.cpp、client.cpp,内容如程序清单 5.2所示。
程序清单 5.2 server.cpp和client.cpp
client.cpp#include <Ice/Ice.h>#include <demo.h>using namespace demo;using namespace std;intmain(int argc, char * argv[]){ int status = 0;
Ice::CommunicatorPtr ic; try {
ic = Ice::initialize(argc, argv);
Ice::ObjectPrx base = ic->stringToProxy( "SimplePrinter:default -p 10000");
printerPrx printer = printerPrx::checkedCast(base); if (!printer) throw "Invalid proxy";
printer->printerstr("Hello World!");
} catch (const Ice::Exception & ex) { cerr << ex << endl;
status = 1;
} catch (const char * msg) { cerr << msg << endl;
status = 1;
} if (ic)
ic->destroy(); return status;
}
server.cpp#include <Ice/Ice.h>#include <demo.h>using namespace demo;using namespace std;class PrinterI : public printer { public: virtual void printerstr(const string & s, const Ice::Current &);
};voidPrinterI::
printerstr(const string & s, const Ice::Current &)
{ cout << s << endl;
}intmain(int argc, char* argv[]){ int status = 0;
Ice::CommunicatorPtr ic; try {
ic = Ice::initialize(argc, argv);
Ice::ObjectAdapterPtr adapter
= ic->createObjectAdapterWithEndpoints( "SimplePrinterAdapter", "default -p 10000");
Ice::ObjectPtr object = new PrinterI;
adapter->add(object,
ic->stringToIdentity("SimplePrinter"));
adapter->activate();
ic->waitForShutdown();
} catch (const Ice::Exception & e) { cerr << e << endl;
status = 1;
} catch (const char * msg) { cerr << msg << endl;
status = 1;
} if (ic)
ic->destroy(); return status;
}
应用程序同样使用专家模式,需创建server.mk和client.mk两份Makefile文件。分别加入对应的代码,server.mk中编译demo.cpp、server.cpp,client.mk中编译demo.cpp、client.cpp。并依赖ICE库。编译生成两份可执行文件,server和client。在SylixOS设备上先后执行server和client,若在执行client时server出现“Hello World”信息表示client成功调用server接口,运行结果正常。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。