您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
今天就跟大家聊聊有关怎么在Pytorch中实现一个GoogLeNet方法,可能很多人都不太了解,为了让大家更加了解,小编给大家总结了以下内容,希望大家根据这篇文章可以有所收获。
1.PyTorch是相当简洁且高效快速的框架;2.设计追求最少的封装;3.设计符合人类思维,它让用户尽可能地专注于实现自己的想法;4.与google的Tensorflow类似,FAIR的支持足以确保PyTorch获得持续的开发更新;5.PyTorch作者亲自维护的论坛 供用户交流和求教问题6.入门简单
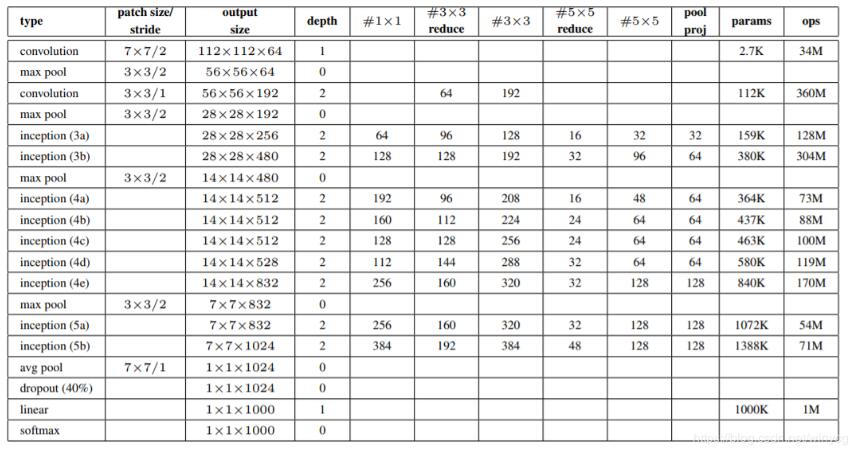
GoogLeNet也叫InceptionNet,在2014年被提出,如今已到V4版本。GoogleNet比VGGNet具有更深的网络结构,一共有22层,但是参数比AlexNet要少12倍,但是计算量是AlexNet的4倍,原因就是它采用很有效的Inception模块,并且没有全连接层。
最重要的创新点就在于使用inception模块,通过使用不同维度的卷积提取不同尺度的特征图。左图是最初的Inception模块,右图是使用的1×1得卷积对左图的改进,降低了输入的特征图维度,同时降低了网络的参数量和计算复杂度,称为inception V1。
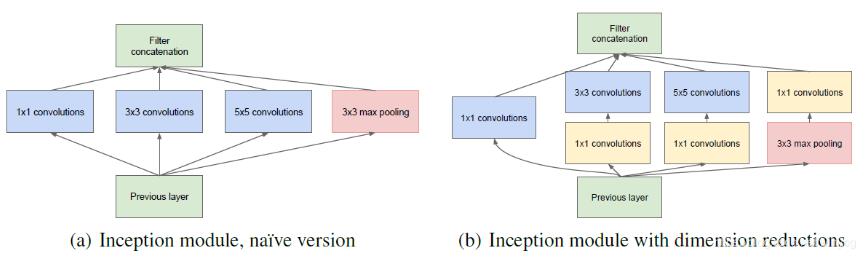
GoogleNet在架构设计上为保持低层为传统卷积方式不变,只在较高的层开始用Inception模块。
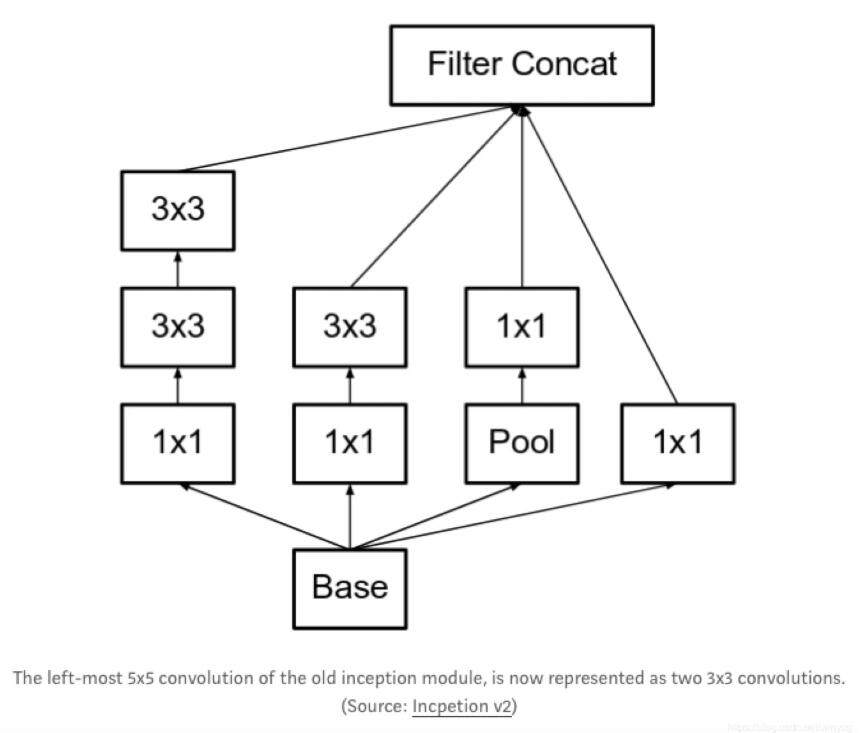
inception V2中将5x5的卷积改为2个3x3的卷积,扩大了感受野,原来是5x5,现在是6x6。Pytorch实现GoogLeNet(inception V2):
'''GoogLeNet with PyTorch.''' import torch import torch.nn as nn import torch.nn.functional as F # 编写卷积+bn+relu模块 class BasicConv2d(nn.Module): def __init__(self, in_channels, out_channals, **kwargs): super(BasicConv2d, self).__init__() self.conv = nn.Conv2d(in_channels, out_channals, **kwargs) self.bn = nn.BatchNorm2d(out_channals) def forward(self, x): x = self.conv(x) x = self.bn(x) return F.relu(x) # 编写Inception模块 class Inception(nn.Module): def __init__(self, in_planes, n1x1, n3x3red, n3x3, n5x5red, n5x5, pool_planes): super(Inception, self).__init__() # 1x1 conv branch self.b1 = BasicConv2d(in_planes, n1x1, kernel_size=1) # 1x1 conv -> 3x3 conv branch self.b2_1x1_a = BasicConv2d(in_planes, n3x3red, kernel_size=1) self.b2_3x3_b = BasicConv2d(n3x3red, n3x3, kernel_size=3, padding=1) # 1x1 conv -> 3x3 conv -> 3x3 conv branch self.b3_1x1_a = BasicConv2d(in_planes, n5x5red, kernel_size=1) self.b3_3x3_b = BasicConv2d(n5x5red, n5x5, kernel_size=3, padding=1) self.b3_3x3_c = BasicConv2d(n5x5, n5x5, kernel_size=3, padding=1) # 3x3 pool -> 1x1 conv branch self.b4_pool = nn.MaxPool2d(3, stride=1, padding=1) self.b4_1x1 = BasicConv2d(in_planes, pool_planes, kernel_size=1) def forward(self, x): y1 = self.b1(x) y2 = self.b2_3x3_b(self.b2_1x1_a(x)) y3 = self.b3_3x3_c(self.b3_3x3_b(self.b3_1x1_a(x))) y4 = self.b4_1x1(self.b4_pool(x)) # y的维度为[batch_size, out_channels, C_out,L_out] # 合并不同卷积下的特征图 return torch.cat([y1, y2, y3, y4], 1) class GoogLeNet(nn.Module): def __init__(self): super(GoogLeNet, self).__init__() self.pre_layers = BasicConv2d(3, 192, kernel_size=3, padding=1) self.a3 = Inception(192, 64, 96, 128, 16, 32, 32) self.b3 = Inception(256, 128, 128, 192, 32, 96, 64) self.maxpool = nn.MaxPool2d(3, stride=2, padding=1) self.a4 = Inception(480, 192, 96, 208, 16, 48, 64) self.b4 = Inception(512, 160, 112, 224, 24, 64, 64) self.c4 = Inception(512, 128, 128, 256, 24, 64, 64) self.d4 = Inception(512, 112, 144, 288, 32, 64, 64) self.e4 = Inception(528, 256, 160, 320, 32, 128, 128) self.a5 = Inception(832, 256, 160, 320, 32, 128, 128) self.b5 = Inception(832, 384, 192, 384, 48, 128, 128) self.avgpool = nn.AvgPool2d(8, stride=1) self.linear = nn.Linear(1024, 10) def forward(self, x): out = self.pre_layers(x) out = self.a3(out) out = self.b3(out) out = self.maxpool(out) out = self.a4(out) out = self.b4(out) out = self.c4(out) out = self.d4(out) out = self.e4(out) out = self.maxpool(out) out = self.a5(out) out = self.b5(out) out = self.avgpool(out) out = out.view(out.size(0), -1) out = self.linear(out) return out def test(): net = GoogLeNet() x = torch.randn(1,3,32,32) y = net(x) print(y.size()) test()
看完上述内容,你们对怎么在Pytorch中实现一个GoogLeNet方法有进一步的了解吗?如果还想了解更多知识或者相关内容,请关注亿速云行业资讯频道,感谢大家的支持。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。