жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
иҝҷзҜҮж–Үз« дё»иҰҒд»Ӣз»ҚOpenCVеҰӮдҪ•е®һзҺ°её§й—ҙе·®еҲҶжі•пјҢж–Үдёӯд»Ӣз»Қзҡ„йқһеёёиҜҰз»ҶпјҢе…·жңүдёҖе®ҡзҡ„еҸӮиҖғд»·еҖјпјҢж„ҹе…ҙи¶Јзҡ„е°Ҹдјҷдјҙ们дёҖе®ҡиҰҒзңӢе®ҢпјҒ
е…·дҪ“еҶ…е®№еҰӮдёӢ
дёҖ.еҹәжң¬жҰӮеҝө
еҹәдәҺи§Ҷйў‘зҡ„иҪҰиҫҶжЈҖжөӢз®—жі•з§Қзұ»еҫҲеӨҡпјҡе…үжөҒжі•жЈҖжөӢпјҢеё§е·®жі•пјҢиғҢжҷҜж¶ҲйҷӨжі•пјҲе…¶дёӯеҢ…жӢ¬пјҡзӣҙж–№еӣҫжі•пјҢе№іеқҮеҖјжі•пјҢеҚ•еҲҶеёғе’Ңж··еҗҲй«ҳж–ҜеҲҶеёғиғҢжҷҜжЁЎеһӢпјҢKalmanж»ӨжіўзӯүпјүпјҢиҫ№зјҳжЈҖжөӢжі•пјҢиҝҗеҠЁзҹўйҮҸжЈҖжөӢжі•...дёӢйқўеҲҶдә«зҡ„жҳҜиҝҗеҠЁзӣ®ж ҮжЈҖжөӢз®—жі•дёӯжңҖеҹәжң¬зҡ„ж–№жі•вҖ”её§й—ҙе·®еҲҶжі•гҖӮ
зӣёйӮ»её§й—ҙеӣҫеғҸе·®еҲҶжҖқжғіпјҡжЈҖжөӢеҮәдәҶзӣёйӮ»дёӨеё§еӣҫеғҸдёӯеҸ‘з”ҹеҸҳеҢ–зҡ„еҢәеҹҹгҖӮиҜҘж–№жі•жҳҜз”ЁеӣҫеғҸеәҸеҲ—дёӯзҡ„иҝһз»ӯдёӨеё§еӣҫеғҸиҝӣиЎҢе·®еҲҶпјҢ然еҗҺдәҢеҖјеҢ–иҜҘзҒ°еәҰе·®еҲҶеӣҫеғҸжқҘжҸҗеҸ–иҝҗеҠЁдҝЎжҒҜгҖӮз”ұеё§й—ҙеҸҳеҢ–еҢәеҹҹжЈҖжөӢеҲҶеүІеҫ—еҲ°зҡ„еӣҫеғҸпјҢеҢәеҲҶеҮәиғҢжҷҜеҢәеҹҹе’ҢиҝҗеҠЁиҪҰиҫҶеҢәеҹҹпјҢиҝӣиҖҢжҸҗеҸ–иҰҒжЈҖжөӢзҡ„иҪҰиҫҶзӣ®ж ҮгҖӮ
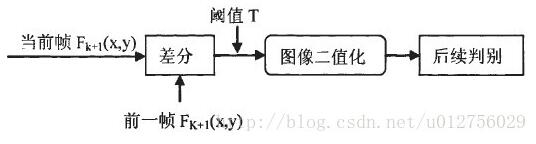
е®ғжҳҜйҖҡиҝҮжҜ”иҫғеӣҫеғҸеәҸеҲ—дёӯеүҚеҗҺдёӨеё§еӣҫеғҸеҜ№еә”еғҸзҙ зӮ№зҒ°еәҰеҖјзҡ„дёҚеҗҢпјҢйҖҡиҝҮдёӨеё§зӣёеҮҸпјҢеҰӮжһңзҒ°еәҰеҖјеҫҲе°ҸпјҢеҸҜд»Ҙи®ӨдёәиҜҘзӮ№ж— иҝҗеҠЁзү©дҪ“з»ҸиҝҮпјӣеҸҚд№ӢзҒ°еәҰеҸҳеҢ–еҫҲеӨ§пјҢеҲҷи®Өдёәжңүзү©дҪ“з»ҸиҝҮгҖӮ第kеё§е’Ңk+1её§еӣҫеғҸfk(xпјҢy)пјҢfk+l(xпјҢy)д№Ӣй—ҙзҡ„еҸҳеҢ–з”ЁдёҖдёӘдәҢеҖје·®еҲҶеӣҫеғҸD(xпјҢy)иЎЁзӨәпјҢеҰӮејҸ:

дәҢеҖјеӣҫдёӯ0еҜ№еә”еүҚеҗҺжңӘеҸҳеҢ–зҡ„ең°ж–№пјҢ1еҜ№еә”еҸҳеҢ–зҡ„ең°ж–№гҖӮжөҒзЁӢеӣҫеҰӮдёӢеӣҫжүҖзӨәпјҡ
её§е·®жі•зҡ„зү№зӮ№жҳҜе®һзҺ°з®ҖеҚ•пјҢиҝҗз®—йҖҹеәҰеҝ«пјҢеҜ№дәҺеҠЁжҖҒзҺҜеўғиҮӘйҖӮеә”жҖ§жҳҜеҫҲејәзҡ„пјҢеҜ№е…үзәҝзҡ„еҸҳеҢ–дёҚжҳҜеҚҒеҲҶзҡ„ж•Ҹж„ҹгҖӮдҪҶжҳҜеңЁиҝҗеҠЁдҪ“еҶ…жҳ“дә§з”ҹз©әжҙһпјҺзү№еҲ«жҳҜзӣ®ж ҮиҝҗеҠЁйҖҹеәҰиҫғеҝ«ж—¶пјҢеҪұе“Қзӣ®ж ҮеҢәеҹҹеҮҶзЎ®жҸҗеҸ–гҖӮжҲ‘们д»Ҙе№ҙиҫҶжЈҖжөӢдёәдҫӢпјҢиҪҰиҫҶжЈҖжөӢйҷӨдәҶиҰҒжЈҖжөӢеҮәиҝҗеҠЁиҪҰиҫҶпјҺеҗҢж—¶иҝҳиҰҒжЈҖжөӢеҮәжҡӮж—¶еҒңжӯўзҡ„иҪҰиҫҶпјҢеңЁиҝҷдёӘж–№йқўпјҢжӯӨзұ»ж–№жі•ж— иғҪдёәеҠӣгҖӮиҖҢдё”еҰӮжһңиҪҰиҫҶзҡ„дҪ“з§ҜиҫғеӨ§пјҢйӮЈд№ҲиҪҰиҫҶеңЁеүҚеҗҺеё§дёӯж №е®№жҳ“дә§з”ҹйҮҚеҸ йғЁеҲҶпјҢе°Өе…¶жҳҜеӨ§иҙ§иҪҰпјҢиҝҷдҪҝеҫ—её§й—®е·®еҲҶзҡ„з»“жһңдё»иҰҒдёәиҪҰеӨҙе’ҢиҪҰе°ҫгҖӮиҪҰиҫҶдёӯй—ҙйғЁеҲҶзҡ„е·®еҲҶеҖјзӣёеҜ№жҠҘе°ҸпјҺеҪўжҲҗз©әжҙһпјҢдёҚеҲ©дәҺжЈҖжөӢгҖӮ
дәҢ.зЁӢеәҸжәҗд»Јз Ғ
#include "stdafx.h"
#include "highgui.h"
#include "cxcore.h"
#include "ml.h"
#include "cv.h"
void main()
{
CvCapture* capture;
capture=cvCaptureFromFile("video.avi");//иҺ·еҸ–и§Ҷйў‘
cvNamedWindow("camera",CV_WINDOW_AUTOSIZE);
cvNamedWindow("moving area",CV_WINDOW_AUTOSIZE);
IplImage* tempFrame;//з”ЁдәҺйҒҚеҺҶcaptureдёӯзҡ„её§пјҢйҖҡйҒ“ж•°дёә3пјҢйңҖиҰҒиҪ¬еҢ–дёәеҚ•йҖҡйҒ“жүҚеҸҜд»ҘеӨ„зҗҶ
IplImage* currentFrame;//еҪ“еүҚеё§
IplImage* previousFrame;//дёҠдёҖеё§
/*
CvMatз»“жһ„пјҢжң¬иҙЁдёҠе’ҢIplImageе·®дёҚеӨҡпјҢдҪҶжҳҜеӣ дёәIplImageйҮҢзҡ„ж•°жҚ®еҸӘиғҪз”Ёucharзҡ„еҪўејҸеӯҳж”ҫпјҢеҪ“йңҖиҰҒиҝҷдәӣеӣҫеғҸж•°жҚ®зңӢдҪңж•°жҚ®зҹ©йҳөжқҘиҝҗз®—ж—¶пјҢ0~255зҡ„зІҫеәҰжҳҫ然满足дёҚдәҶиҰҒжұӮпјӣ
然иҖҢCvMatйҮҢеҚҙеҸҜд»Ҙеӯҳж”ҫд»»ж„ҸйҖҡйҒ“ж•°гҖҒд»»ж„Ҹж јејҸзҡ„ж•°жҚ®
*/
CvMat* tempFrameMat;
CvMat* currentFrameMat; //IplImageиҰҒиҪ¬жҲҗCvMatиҝӣиЎҢеӨ„зҗҶ
CvMat* previousFrameMat;
int frameNum=0;
while(tempFrame=cvQueryFrame(capture))
{
//tempFrame=cvQueryFrame(capture);
frameNum++;
if(frameNum==1)
{
//第дёҖеё§е…ҲеҲқе§ӢеҢ–еҗ„дёӘз»“жһ„пјҢдёәе®ғ们еҲҶй…Қз©әй—ҙ
previousFrame=cvCreateImage(cvSize(tempFrame->width,tempFrame->height),IPL_DEPTH_8U,1);
currentFrame=cvCreateImage(cvSize(tempFrame->width,tempFrame->height),IPL_DEPTH_8U,1);
currentFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);
previousFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);
tempFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);
//жӯӨж—¶иҝҷдәӣIplImageе’ҢCvMatйғҪжҳҜз©әзҡ„пјҢжІЎжңүеӯҳжңүж•°жҚ®
}
if(frameNum>=2)
{
cvCvtColor(tempFrame, currentFrame, CV_BGR2GRAY);//иҪ¬еҢ–дёәеҚ•йҖҡйҒ“зҒ°еәҰеӣҫпјҢжӯӨж—¶currentFrameе·Із»ҸеӯҳдәҶtempFrameзҡ„еҶ…е®№
/*
з”ЁcvConvertе°ҶIplImageиҪ¬дёәCvMatпјҢжҺҘдёӢжқҘз”ЁcvAbsDiffеҜ№е®ғ们еӨ„зҗҶ
з»ҸиҝҮиҪ¬жҚўеҗҺпјҢcurrentFrameжІЎжңүж”№еҸҳпјҢдҪҶжҳҜtempFrameMatе·Із»ҸеӯҳдәҶcurrentFrameзҡ„еҶ…е®№
*/
cvConvert(currentFrame,tempFrameMat);
cvConvert(previousFrame,previousFrameMat);
cvAbsDiff(tempFrameMat,previousFrameMat,currentFrameMat);//еҒҡе·®жұӮз»қеҜ№еҖј
/*
еңЁcurrentFrameMatдёӯжүҫеӨ§дәҺ20пјҲйҳҲеҖјпјүзҡ„еғҸзҙ зӮ№пјҢжҠҠcurrentFrameдёӯеҜ№еә”зҡ„зӮ№и®ҫдёә255
жӯӨеӨ„йҳҲеҖјеҸҜд»Ҙеё®еҠ©жҠҠиҪҰиҫҶзҡ„йҳҙеҪұж¶ҲйҷӨжҺү
*/
cvThreshold(currentFrameMat,currentFrame,20,255.0,CV_THRESH_BINARY);
//cvConvert(currentFrameMat,currentFrame); //и§ӮеҜҹдёҚдәҢеҖјеҢ–зҡ„жғ…еҶө
cvDilate(currentFrame,currentFrame); //иҶЁиғҖ
cvErode(currentFrame,currentFrame); //и…җиҡҖ
cvFlip(currentFrame, NULL, 0); //еһӮзӣҙзҝ»иҪ¬
//жҳҫзӨәеӣҫеғҸ
cvShowImage("camera",tempFrame);
cvShowImage("moving area",currentFrame);
}
//жҠҠеҪ“еүҚеё§дҝқеӯҳдҪңдёәдёӢдёҖж¬ЎеӨ„зҗҶзҡ„еүҚдёҖеё§
cvCvtColor(tempFrame, previousFrame, CV_BGR2GRAY);
cvWaitKey(33);
}//end while
//йҮҠж”ҫиө„жәҗ
cvReleaseImage(&tempFrame);
cvReleaseImage(&previousFrame);
cvReleaseImage(¤tFrame);
cvReleaseCapture(&capture);
cvReleaseMat(&previousFrameMat);
cvReleaseMat(¤tFrameMat);
cvDestroyWindow("camera");
cvDestroyWindow("moving area");
}д»ҘдёҠжҳҜвҖңOpenCVеҰӮдҪ•е®һзҺ°её§й—ҙе·®еҲҶжі•вҖқиҝҷзҜҮж–Үз« зҡ„жүҖжңүеҶ…е®№пјҢж„ҹи°ўеҗ„дҪҚзҡ„йҳ…иҜ»пјҒеёҢжңӣеҲҶдә«зҡ„еҶ…е®№еҜ№еӨ§е®¶жңүеё®еҠ©пјҢжӣҙеӨҡзӣёе…ізҹҘиҜҶпјҢж¬ўиҝҺе…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“пјҒ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ