您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
什么是SLAM 技术?很多新手对此不是很清楚,为了帮助大家解决这个难题,下面小编将为大家详细讲解,有这方面需求的人可以来学习下,希望你能有所收获。
SLAM技术是指同时定位与建图,其意思是机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航,因此可知SLAM的主要工作是定位以及建图。
SLAM的基本过程
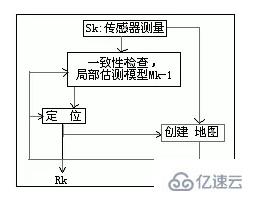
机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
(1)定位(localization):机器人必须知道自己在环境中位置。
(2)建图(mapping):机器人必须记录环境中特征的位置(如果知道自己的位置)
(3)SLAM:机器人在定位的同时建立环境地图。其基本原理是运过概率统计的方法,通过多特征匹配来达到定位和减少定位误差的。
SLAM的主要模块
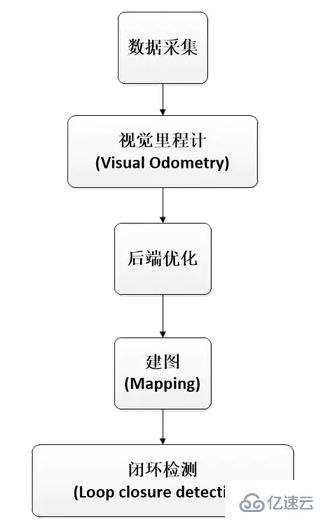
视觉SLAM主要分为几个模块:数据采集、视觉里程计(Visual Odometry)、后端优化、建图(Mapping)、闭环检测(Loop closure detection)。如下图所示:
看完上述内容是否对您有帮助呢?如果还想对相关知识有进一步的了解或阅读更多相关文章,请关注亿速云行业资讯频道,感谢您对亿速云的支持。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。