жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
йҡҸзқҖе…Ёйқўдә‘ж—¶д»ЈеҲ°жқҘпјҢеҫҲеӨҡе…¬еҸёйғҪиө°дёҠдәҶе®№еҷЁеҢ–йҒ“и·ҜпјҢиҖҒеҲҳжүҖеңЁзҡ„е…¬еҸёд№ҹдёҚдҫӢеӨ–гҖӮдҪңдёәдёҖ家еҲқеҲӣеһӢзҡ„дә’иҒ”зҪ‘е…¬еҸёпјҢе®№еҷЁеҢ–зҡ„зЎ®еёҰжқҘдәҶеҫҲеӨҡдҫҝжҚ·пјҢд№ҹйҷҚдҪҺдәҶе…¬еҸёжҲҗжң¬пјҢдёҚиҝҮиҖҒеҲҳеҚҙжңүдёҖдёӘиӢҰжҒјпјҢд»ҘеүҚжҜҸеӨ©е’Ңд»–дёҖиө·дёӢзҸӯзҡ„е°ҸзҺӢиҮӘд»Һе…¬еҸёдёҠдә‘д»ҘеҗҺжҜҸеӨ©йғҪжҜ”д»–ж—©дёӢзҸӯдёҖдёӘе°Ҹж—¶пјҢеӨ§е®¶жүӢеӨҙдёҠзҡ„жҙ»йғҪе·®дёҚеӨҡпјҢи®ІйҒ“зҗҶдёҚеә”иҜҘе‘ҖпјҢз»ҸиҝҮеӨҡз•ӘиҜ•жҺўгҖҒи·ҹиёӘгҖҒи°ғжҹҘпјҢз»ҲдәҺи®©иҖҒеҲҳеҸ‘зҺ°дәҶз§ҳеҜҶзҡ„жүҖеңЁгҖӮ
дҪңдёәдёҖдёӘејҖеҸ‘пјҢжҜҸеӨ©жҖ»е°‘дёҚдәҶиҰҒеҮәNдёӘжөӢиҜ•зүҲжң¬иҝӣиЎҢи°ғиҜ•пјҢе®№еҷЁеҢ–д»ҘеҗҺжҜҸж¬ЎеҮәзүҲжң¬йғҪйңҖиҰҒжү“жҲҗй•ңеғҸпјҢиҖҒеҲҳеҸ‘зҺ°жҜҸж¬Ўд»–еҒҡдёҖдёӘй•ңеғҸйғҪиҰҒ20еҲҶй’ҹпјҢиҖҢе°ҸзҺӢеҸӘиҰҒ10еҲҶй’ҹпјҢеҜ№жҜ”жқҘеҜ№жҜ”еҺ»еҸӘжңүиҝҷдёӘдёңиҘҝдёҚдёҖж ·пјҒ

Storage-DirverеҲ°еә•жҳҜдҪ•ж–№зҘһеңЈпјҹдёәд»Җд№ҲиғҪеӨҹеҜјиҮҙжһ„е»әж—¶й—ҙдёҠзҡ„е·®ејӮпјҹзҺ°еңЁи®©жҲ‘们жқҘдёҖзӘҘ究з«ҹгҖӮ
еңЁеӣһзӯ”иҝҷдёӘй—®йўҳд№ӢеүҚжҲ‘们йңҖиҰҒе…Ҳеӣһзӯ”дёүдёӘй—®йўҳвҖ”вҖ”д»Җд№ҲжҳҜй•ңеғҸпјҹд»Җд№ҲжҳҜй•ңеғҸжһ„е»әпјҹд»Җд№ҲжҳҜstorage-driverпјҹ
д»Җд№ҲжҳҜй•ңеғҸпјҹ
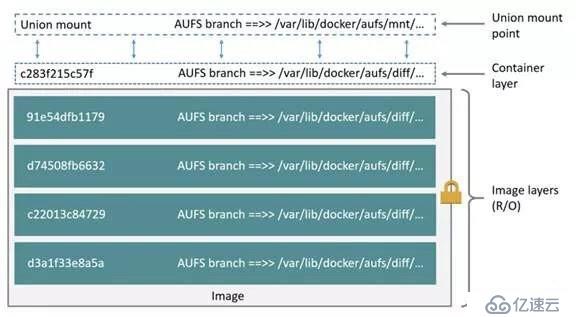
иҜҙеҲ°й•ңеғҸе°ұз»•дёҚејҖе®№еҷЁпјҢжҲ‘们е…ҲзңӢдёҖеј жқҘиҮӘе®ҳж–№еҜ№й•ңеғҸе’Ңе®№еҷЁи§ЈйҮҠзҡ„еӣҫзүҮпјҡ
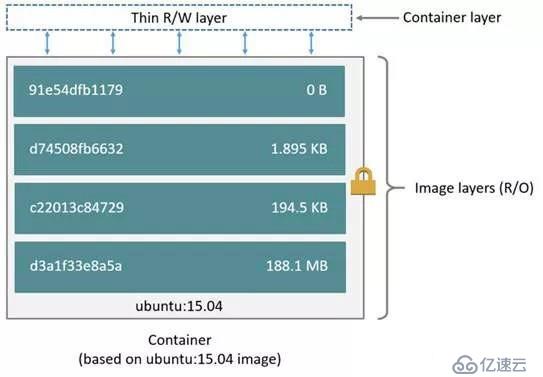
зңӢе®Ңд»ҘеҗҺжҳҜдёҚжҳҜжӣҙз–‘жғ‘дәҶпјҢжҲ‘们еҸҜд»Ҙиҝҷж ·з®ҖеҚ•зІ—жҡҙзҡ„еҺ»зҗҶи§ЈпјҢй•ңеғҸе°ұжҳҜдёҖе ҶеҸӘиҜ»еұӮзҡ„е ҶеҸ гҖӮйӮЈеҸӘиҜ»еұӮйҮҢеҲ°еә•жҳҜд»Җд№Ҳе‘ўпјҢеҸҰеӨ–дёҖдёӘз®ҖеҚ•зІ—жҡҙзҡ„и§ЈйҮҠпјҡйҮҢиҫ№е°ұжҳҜж”ҫдәҶдёҖе Ҷиў«ж”№еҠЁзҡ„ж–Ү件гҖӮиҝҷдёӘи§ЈйҮҠеңЁдёҚеҗҢзҡ„storage-driverдёӢдёҚдёҖе®ҡеҮҶзЎ®дҪҶжҳҜжҲ‘们еҸҜд»Ҙе…Ҳиҝҷж ·з®ҖеҚ•еҺ»зҗҶи§ЈгҖӮ
йӮЈдёҚеҜ№е‘ҖпјҢжү§иЎҢе®№еҷЁзҡ„ж—¶еҖҷжҳҺжҳҺжҳҜеҸҜд»ҘеҺ»дҝ®ж”№еҲ йҷӨе®№еҷЁйҮҢзҡ„ж–Ү件зҡ„пјҢйғҪжҳҜеҸӘиҜ»зҡ„иҜқжҖҺд№ҲеҺ»дҝ®ж”№е‘ўпјҹе®һйҷ…дёҠжҲ‘们иҝҗиЎҢе®№еҷЁзҡ„ж—¶еҖҷжҳҜеңЁйӮЈдёҖе ҶеҸӘиҜ»еұӮзҡ„йЎ¶дёҠеҶҚеўһеҠ дәҶдёҖдёӘиҜ»еҶҷеұӮпјҢжүҖжңүзҡ„ж“ҚдҪңйғҪжҳҜеңЁиҝҷдёӘиҜ»еҶҷеұӮйҮҢиҝӣиЎҢзҡ„пјҢеҪ“йңҖиҰҒдҝ®ж”№дёҖдёӘж–Ү件зҡ„ж—¶еҖҷжҲ‘们дјҡе°ҶйңҖиҰҒдҝ®ж”№зҡ„ж–Ү件д»Һеә•еұӮжӢ·иҙқеҲ°иҜ»еҶҷеұӮеҶҚиҝӣиЎҢдҝ®ж”№гҖӮйӮЈеҰӮжһңжҳҜеҲ йҷӨе‘ўпјҢжҲ‘们дёҚжҳҜжІЎжңүеҠһжі•еҲ йҷӨеә•еұӮзҡ„ж–Ү件д№ҲпјҹжІЎй”ҷпјҢзЎ®е®һжІЎжңүеҠһжі•еҲ йҷӨпјҢдҪҶеҸӘйңҖиҰҒеңЁдёҠеұӮжҠҠиҝҷдёӘж–Ү件йҡҗи—Ҹиө·жқҘпјҢе°ұеҸҜд»ҘиҫҫеҲ°еҲ йҷӨзҡ„ж•ҲжһңгҖӮжҢүз…§е®ҳж–№иҜҙжі•пјҢиҝҷе°ұжҳҜDockerзҡ„еҶҷж—¶еӨҚеҲ¶зӯ–з•ҘгҖӮ
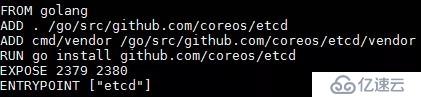
дёәдәҶеҠ ж·ұеӨ§е®¶еҜ№й•ңеғҸеұӮзҡ„зҗҶи§ЈжҲ‘们жқҘдёҫдёӘж —еӯҗпјҢз”ЁдёӢйқўзҡ„Dockerfileжһ„е»әдёҖдёӘetcdй•ңеғҸпјҡ
жһ„е»әе®ҢжҲҗд»ҘеҗҺз”ҹжҲҗдәҶеҰӮдёӢзҡ„еұӮж–Ү件пјҡ

жҜҸж¬Ўиҝӣе…Ҙе®№еҷЁзҡ„ж—¶еҖҷйғҪж„ҹи§үд»ҝдҪӣиҝӣе…ҘдәҶдёҖеҸ°иҷҡжңәпјҢйҮҢйқўеҢ…еҗ«linuxзҡ„еҗ„дёӘзі»з»ҹзӣ®еҪ•гҖӮйӮЈжҳҜдёҚжҳҜжңүдёҖеұӮзӣ®еҪ•йҮҢеҢ…еҗ«дәҶжүҖжңүзҡ„linuxзі»з»ҹзӣ®еҪ•е‘ўпјҹ
bingoзӯ”еҜ№пјҒеңЁжңҖеә•еұӮзҡ„еұӮзӣ®еҪ•зҡ„зЎ®еҢ…еҗ«дәҶlinuxзҡ„жүҖжңүзҡ„зі»з»ҹзӣ®еҪ•ж–Ү件гҖӮ

дёҠиҝ°Dockerfileдёӯжңүиҝҷж ·дёҖжӯҘж“ҚдҪң
ADD . /go/src/github.com/coreos/etcd
е°ҶеӨ–йқўзӣ®еҪ•зҡ„ж–Ү件жӢ·еҲ°дәҶй•ңеғҸдёӯпјҢйӮЈиҝҷдёҖеұӮй•ңеғҸйҮҢ究з«ҹдҝқеӯҳдәҶд»Җд№Ҳе‘ўпјҹ

жү“ејҖеҸ‘зҺ°йҮҢйқўе°ұеҸӘжңү
/go/src/github.com/coreos/etcdиҝҷдёӘзӣ®еҪ•пјҢзӣ®еҪ•дёӢеӯҳж”ҫдәҶжӢ·иҙқиҝӣжқҘзҡ„ж–Ү件гҖӮ
еҲ°иҝҷйҮҢжҳҜдёҚжҳҜжңүз§Қз®ЎдёӯзӘҘиұ№зҡ„ж„ҹи§үпјҢжҺҘдёӢжқҘжҲ‘们еҶҚжқҘдәҶи§Јд»Җд№ҲжҳҜй•ңеғҸжһ„е»әпјҢиҝҷж ·еҹәжң¬дёҠиғҪеӨҹзӘҘе…¶е…ЁиІҢдәҶгҖӮ
д»Җд№ҲжҳҜй•ңеғҸжһ„е»әпјҹ
йҖҡиҝҮ第дёҖиҠӮзҡ„еҶ…е®№жҲ‘们зҹҘйҒ“дәҶй•ңеғҸжҳҜз”ұдёҖе ҶеұӮзӣ®еҪ•з»„жҲҗзҡ„пјҢжҜҸдёӘеұӮзӣ®еҪ•йҮҢж”ҫзқҖиҝҷдёҖеұӮдҝ®ж”№зҡ„ж–Ү件пјҢй•ңеғҸжһ„е»әз®ҖеҚ•зҡ„иҜҙе°ұжҳҜеҲ¶дҪңе’Ңз”ҹжҲҗй•ңеғҸеұӮзҡ„иҝҮзЁӢпјҢйӮЈиҝҷдёҖиҝҮзЁӢжҳҜеҰӮдҪ•е®һзҺ°зҡ„е‘ўпјҹд»ҘдёӢеӣҫжөҒзЁӢдёәдҫӢпјҡ
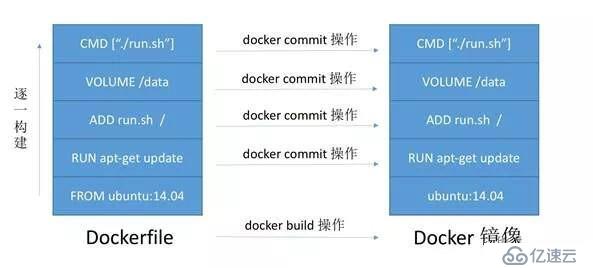
Docker DaemonйҰ–е…ҲеҲ©з”ЁеҹәзЎҖй•ңеғҸubuntu:14.04еҲӣе»әдәҶдёҖдёӘе®№еҷЁзҺҜеўғпјҢйҖҡиҝҮ第дёҖиҠӮзҡ„еҶ…е®№жҲ‘们зҹҘйҒ“е®№еҷЁзҡ„жңҖдёҠеұӮжҳҜдёҖдёӘиҜ»еҶҷеұӮпјҢеңЁиҝҷдёҖеұӮжҲ‘们жҳҜеҸҜд»ҘеҶҷе…Ҙдҝ®ж”№зҡ„пјҢDocker DaemonйҰ–е…Ҳжү§иЎҢдәҶRUN apt-update getе‘Ҫд»ӨпјҢжү§иЎҢе®ҢжҲҗд»ҘеҗҺпјҢйҖҡиҝҮDockerзҡ„commitж“ҚдҪңе°ҶиҝҷдёӘиҜ»еҶҷеұӮзҡ„еҶ…е®№дҝқеӯҳжҲҗдёҖдёӘеҸӘиҜ»зҡ„й•ңеғҸеұӮж–Ү件гҖӮжҺҘдёӢжқҘеҶҚеңЁиҝҷдёҖеұӮзҡ„еҹәзЎҖдёҠ继з»ӯжү§иЎҢ ADD run.shе‘Ҫд»ӨпјҢжү§иЎҢе®ҢжҲҗеҗҺ继з»ӯcommitжҲҗдёҖдёӘй•ңеғҸеұӮж–Ү件пјҢеҰӮжӯӨеҸҚеӨҚзӣҙеҲ°е°ҶжүҖжңүзҡ„DockerfileйғҪе‘Ҫд»ӨйғҪиў«жҸҗдәӨеҗҺпјҢй•ңеғҸд№ҹе°ұеҒҡеҘҪдәҶгҖӮ
иҝҷйҮҢжҲ‘们е°ұиғҪи§ЈйҮҠдёәд»Җд№Ҳetcdзҡ„жҹҗдёӘеұӮзӣ®еҪ•йҮҢеҸӘжңүдёҖдёӘgoзӣ®еҪ•дәҶпјҢеӣ дёәжһ„е»әзҡ„иҝҮзЁӢжҳҜйҖҗеұӮжҸҗдәӨзҡ„пјҢжҜҸдёҖеұӮйҮҢеҸӘдјҡдҝқеӯҳиҝҷдёҖеұӮж“ҚдҪңжүҖж¶үеҸҠж”№еҠЁзҡ„ж–Ү件гҖӮ
иҝҷж ·зңӢжқҘй•ңеғҸжһ„е»әе°ұжҳҜдёҖдёӘеҸҚеӨҚжҢүз…§DockerfileеҗҜеҠЁе®№еҷЁжү§иЎҢе‘Ҫд»Ө并дҝқеӯҳжҲҗеҸӘиҜ»ж–Ү件зҡ„иҝҮзЁӢпјҢйӮЈдёәд»Җд№ҲйҖҹеәҰдјҡдёҚдёҖж ·е‘ўпјҹжҺҘдёӢжқҘе°ұеҫ—иҜҙеҲ°storage-driverдәҶгҖӮ
д»Җд№ҲжҳҜstorage-driverпјҹ
еҶҚжқҘеӣһйЎҫдёҖдёӢиҝҷеј еӣҫпјҡ
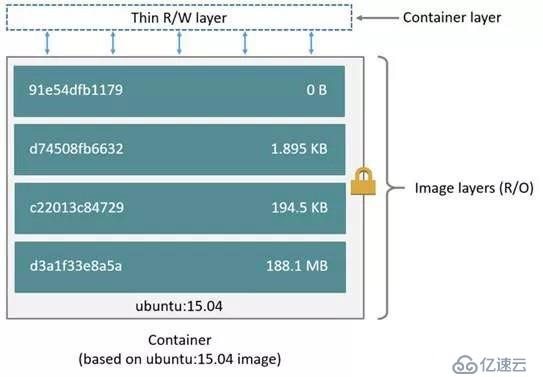
д№ӢеүҚжҲ‘们已з»ҸзҹҘйҒ“дәҶпјҢй•ңеғҸжҳҜз”ұдёҖдёӘдёӘзҡ„еұӮзӣ®еҪ•еҸ еҠ иө·жқҘзҡ„пјҢе®№еҷЁиҝҗиЎҢж—¶еҸӘжҳҜеңЁдёҠйқўеҶҚеўһеҠ дёҖдёӘиҜ»еҶҷеұӮпјҢеҗҢж—¶иҝҳжңүеҶҷж—¶еӨҚеҲ¶зӯ–з•ҘдҝқиҜҒеңЁжңҖйЎ¶еұӮиғҪеӨҹдҝ®ж”№еә•еұӮзҡ„ж–Ү件еҶ…е®№пјҢйӮЈиҝҷдәӣеҺҹзҗҶжҳҜжҖҺд№Ҳе®һзҺ°зҡ„е‘ўпјҹе°ұжҳҜйқ storage-driverпјҒ
з®ҖеҚ•д»Ӣз»Қдёүз§Қеёёз”Ёзҡ„storage-driverпјҡ
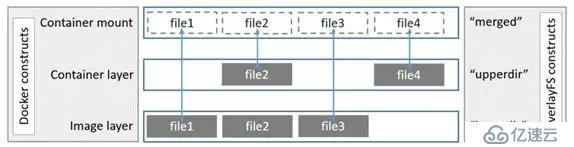
AUFSйҖҡиҝҮиҒ”еҗҲжҢӮиҪҪзҡ„ж–№ејҸе°ҶеӨҡдёӘеұӮж–Ү件е ҶеҸ иө·жқҘпјҢеҪўжҲҗдёҖдёӘз»ҹдёҖзҡ„ж•ҙдҪ“жҸҗдҫӣз»ҹдёҖи§ҶеӣҫпјҢеҪ“еңЁиҜ»еҶҷеұӮиҝӣиЎҢиҜ»еҶҷзҡ„ж—¶пјҢе…ҲеңЁжң¬еұӮжҹҘжүҫж–Ү件жҳҜеҗҰеӯҳеңЁпјҢеҰӮжһңжІЎжңүеҲҷдёҖеұӮдёҖеұӮзҡ„еҫҖдёӢжүҫгҖӮaufsзҡ„ж“ҚдҪңйғҪжҳҜеҹәдәҺж–Ү件зҡ„пјҢйңҖиҰҒдҝ®ж”№дёҖдёӘж–Үд»¶ж—¶ж— и®әеӨ§е°ҸйғҪдјҡе°Ҷж•ҙдёӘж–Ү件д»ҺеҸӘиҜ»еұӮжӢ·иҙқеҲ°иҜ»еҶҷеұӮпјҢеӣ жӯӨеҰӮжһңйңҖиҰҒдҝ®ж”№зҡ„ж–Ү件иҝҮеӨ§пјҢдјҡеҜјиҮҙе®№еҷЁжү§иЎҢйҖҹеәҰеҸҳж…ўпјҢdockerе®ҳж–№з»ҷеҮәзҡ„е»әи®®жҳҜйҖҡиҝҮжҢӮиҪҪзҡ„ж–№ејҸе°ҶеӨ§ж–Ү件жҢӮиҪҪиҝӣжқҘиҖҢдёҚжҳҜж”ҫеңЁй•ңеғҸеұӮдёӯгҖӮ
OverlayFSеҸҜд»Ҙи®ӨдёәжҳҜAUFSзҡ„еҚҮзә§зүҲжң¬пјҢе®№еҷЁиҝҗиЎҢж—¶й•ңеғҸеұӮзҡ„ж–Ү件жҳҜйҖҡиҝҮзЎ¬й“ҫжҺҘзҡ„ж–№ејҸз»„жҲҗдёҖдёӘдёӢеұӮзӣ®еҪ•пјҢиҖҢе®№еҷЁеұӮеҲҷжҳҜе·ҘдҪңеңЁдёҠеұӮзӣ®еҪ•пјҢдёҠеұӮзӣ®еҪ•жҳҜеҸҜиҜ»еҶҷзҡ„пјҢдёӢеұӮзӣ®еҪ•жҳҜеҸӘиҜ»зҡ„пјҢз”ұдәҺеӨ§йҮҸзҡ„йҮҮз”ЁдәҶзЎ¬й“ҫжҺҘзҡ„ж–№ејҸпјҢеҜјиҮҙOverlayFSдјҡеҸҜиғҪдјҡеҮәзҺ°inodeиҖ—е°Ҫзҡ„жғ…еҶөпјҢеҗҺз»ӯOverlay2еҜ№иҝҷдёҖй—®йўҳиҝӣиЎҢдәҶдјҳеҢ–пјҢдё”жҖ§иғҪдёҠеҫ—еҲ°дәҶеҫҲеӨ§зҡ„жҸҗеҚҮпјҢдёҚиҝҮOverlay2д№ҹжңүе’ҢAUFSжңүеҗҢж ·зҡ„ејҠз«ҜвҖ”вҖ”еҜ№еӨ§ж–Ү件зҡ„ж“ҚдҪңйҖҹеәҰжҜ”иҫғж…ўгҖӮ
DeviceMapperе’ҢеүҚдёӨз§ҚStorage-driverеңЁе®һзҺ°дёҠеӯҳеңЁеҫҲеӨ§зҡ„е·®ејӮгҖӮйҰ–е…ҲDeviceMapperзҡ„жҜҸдёҖеұӮдҝқеӯҳзҡ„жҳҜдёҠдёҖеұӮзҡ„еҝ«з…§пјҢе…¶ж¬ЎDeviceMapperеҜ№ж•°жҚ®зҡ„ж“ҚдҪңдёҚеҶҚжҳҜеҹәдәҺж–Ү件зҡ„иҖҢжҳҜеҹәдәҺж•°жҚ®еқ—зҡ„гҖӮ
дёӢеӣҫжҳҜdevicemapperеңЁе®№еҷЁеұӮиҜ»еҸ–ж–Ү件зҡ„иҝҮзЁӢпјҡ
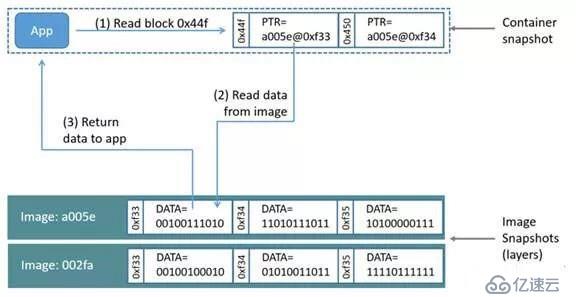
йҰ–е…ҲеңЁе®№еҷЁеұӮзҡ„еҝ«з…§дёӯжүҫеҲ°иҜҘж–Ү件жҢҮеҗ‘дёӢеұӮж–Ү件зҡ„жҢҮй’ҲгҖӮ
еҶҚд»ҺдёӢеұӮ0xf33дҪҚзҪ®жҢҮй’ҲжҢҮеҗ‘зҡ„ж•°жҚ®еқ—дёӯиҜ»еҸ–зҡ„ж•°жҚ®еҲ°е®№еҷЁзҡ„еӯҳеӮЁеҢә
жңҖеҗҺе°Ҷж•°жҚ®иҝ”еӣһappгҖӮ
еңЁеҶҷе…Ҙж•°жҚ®ж—¶иҝҳйңҖиҰҒж №жҚ®ж•°жҚ®зҡ„еӨ§е°Ҹе…Ҳз”іиҜ·1~NдёӘ64Kзҡ„е®№еҷЁеҝ«з…§пјҢз”ЁдәҺдҝқеӯҳжӢ·иҙқзҡ„еқ—ж•°жҚ®гҖӮ
DeviceMapperзҡ„еқ—ж“ҚдҪңзңӢдёҠеҺ»еҫҲзҫҺпјҢе®һйҷ…дёҠеӯҳеңЁеҫҲеӨҡй—®йўҳпјҢжҜ”еҰӮйў‘з№Ғж“ҚдҪңиҫғе°Ҹж–Ү件时йңҖиҰҒдёҚеҒңең°д»Һиө„жәҗжұ дёӯеҲҶй…Қж•°жҚ®еә“并жҳ е°„еҲ°е®№еҷЁдёӯпјҢиҝҷж ·ж•ҲзҺҮдјҡеҸҳеҫ—еҫҲдҪҺпјҢдё”DeviceMapperжҜҸж¬Ўй•ңеғҸиҝҗиЎҢж—¶йғҪйңҖиҰҒжӢ·иҙқжүҖжңүзҡ„й•ңеғҸеұӮдҝЎжҒҜеҲ°еҶ…еӯҳдёӯпјҢеҪ“еҗҜеҠЁеӨҡдёӘй•ңеғҸж—¶дјҡеҚ з”ЁеҫҲеӨ§зҡ„еҶ…еӯҳз©әй—ҙгҖӮ
й’ҲеҜ№дёҚеҗҢзҡ„storage-driverжҲ‘们用дёҠиҝ°etcdзҡ„dockerfileиҝӣиЎҢдәҶдёҖз»„жһ„е»әжөӢиҜ•
| ж–Ү件еӯҳеӮЁзі»з»ҹ | еҚ•ж¬Ўжһ„е»әж—¶й—ҙ | 并еҸ‘10ж¬Ўе№іеқҮжһ„е»әж—¶й—ҙ |
|---|---|---|
| DevivceMapper | 44s | 269.5s |
| AUFS | 8s | 26s |
| Overlay2 | 10s | 269.5s |
жіЁпјҡиҜҘж•°жҚ®еӣ dockerfileд»ҘеҸҠж“ҚдҪңзі»з»ҹгҖҒж–Ү件系з»ҹгҖҒзҪ‘з»ңзҺҜеўғзҡ„дёҚеҗҢжөӢиҜ•з»“жһңеҸҜиғҪдјҡеӯҳеңЁиҫғеӨ§е·®ејӮ
жҲ‘们еҸ‘зҺ°еңЁиҜҘе®һйӘҢеңәжҷҜдёӢDevivceMapperеңЁж—¶й—ҙдёҠжҳҺжҳҫдјҡйҖҠдәҺAUFSе’ҢOverlay2пјҢиҖҢAUFSе’ҢOverlay2еҹәжң¬зӣёеҪ“пјҢеҪ“然иҜҘж•°жҚ®д»…иғҪдҪңдёәдёҖдёӘеҸӮиҖғпјҢе®һйҷ…жһ„е»әиҝҳеҸ—еҲ°е…·дҪ“зҡ„DockerfileеҶ…е®№д»ҘеҸҠж“ҚдҪңзі»з»ҹгҖҒж–Ү件系з»ҹгҖҒзҪ‘з»ңзҺҜеўғзӯүеӨҡж–№йқўзҡ„еҪұе“ҚпјҢйӮЈиҰҒжҖҺд№Ҳж ·жүҚиғҪе°ҪйҮҸи®©жһ„е»әж—¶й—ҙжңҖзҹӯжҸҗеҚҮжҲ‘们зҡ„е·ҘдҪңж•ҲзҺҮе‘ўпјҹ
дё”зңӢдёӢеӣһеҲҶи§ЈпјҒ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ