您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
MT6763_MT6757_PDAF_Driver_and_Buf_mgr_Porting_Guide
PACC驱动程序和BUF_Mgr移植指南
PDAF简介
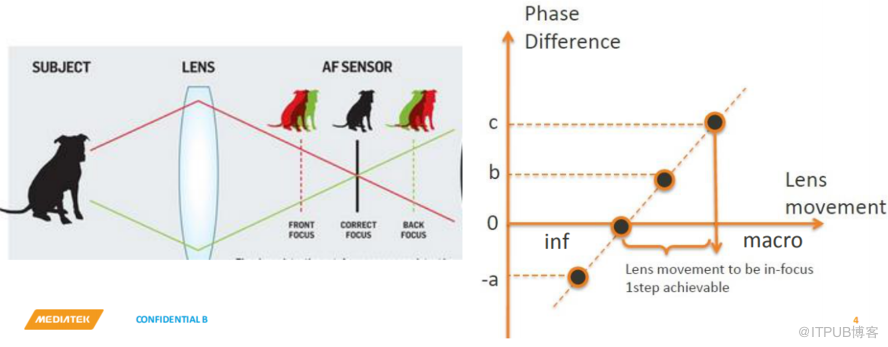
PDAF: Phase Detection Auto Focus
• 通过比较L/R PD pixel构成的两幅图像,PD算法会计算出当前相位差
• 根据相位差和模组的PD calibration data,估算出像距,从而移动lens快速对焦.
(推lens的方向和幅度,由该模组的PD calibration data和当前相位差来决定)
PD相位差 L/R图
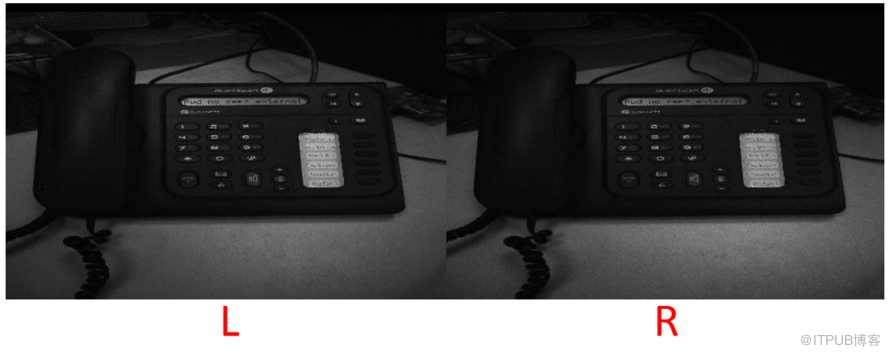
通过两张图像计算出相位差,将相位差与PD calibration data
做比较,来确定lens需要移动到哪个位置
一类sensor PD点

PD sensor Description - INI
请遵循传感器规范
局部放电面积偏移
必须满足Offset <= PD坐标 <= Offset+Pitch-1
PD sensor Description - INI

PD INI 如何正确填写
INI档介绍:
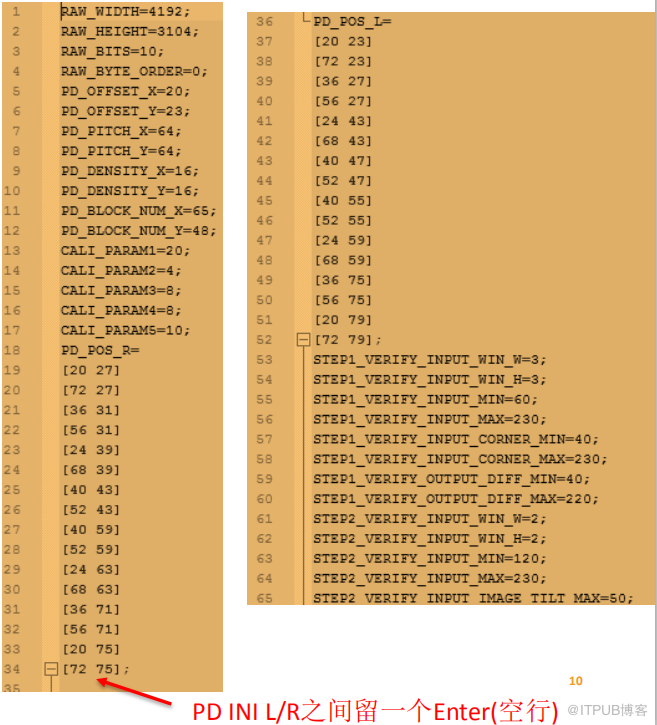
INI文件是sensor vendor给module house做PD calibration时的配置文件,描述PD sensor的output信息及PD calibration参数,其内容会被烧录进eeprom Driver中需要参考INI档的相关信息,INI档的内容一般如右图:其中右图53行以下calibration的相关内容不允许修改。
那么senor vendor应该如何根据sensor setting正确填写INI呢?
PD INI
INI档参数介绍:
http://bbs.16rd.com/thread-468265-1-1.html
参数 含义
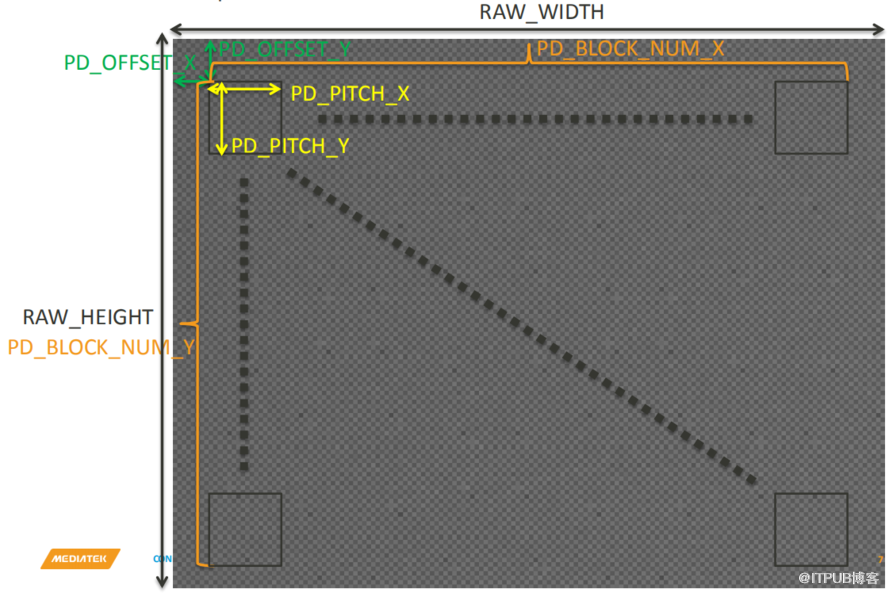
RAW_WIDTH sensor输出数据的宽度
RAW_HEIGHT sensor输出数据的高度
RAW_BITS Pixel Value的位宽 (10: Raw10)
RAW_BYTE_ORDER Pixel传输字节序: LSB or MSB,目前都是(0: MSB)
RAW_BAYER_PATTERN 0: Gr 1: R 2: B 3: Gb
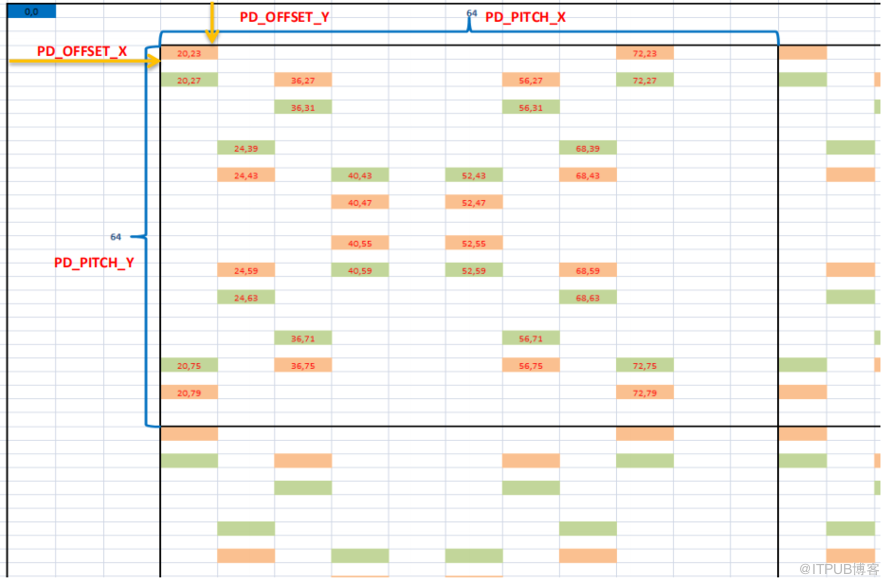
PD_OFFSET_X Sensor PD Area 起始X坐标 (与PD点坐标无绝对关系)
PD_OFFSET_Y Sensor PD Area 起始X坐标 (与PD点坐标无绝对关系)
PD_PITCH_X PD block的宽度
PD_PITCH_Y PD block的高度
PD_DENSITY_X PD pixel的密度(一个X*Y的size里面有一对PD pixel)
PD_DENSITY_Y PD pixel的密度(一个X*Y的size里面有一对PD pixel)
PD_BINNING_TYPE 默认设0;若有sensor PD pixel binning时设1
设1时再配置PD_POS_R_BINN、PD_POS_L_BINN
PD_BLOCK_NUM_X Width方向有多少个PD block
PD_BLOCK_NUM_Y Height 方向有多少个PD block
CALI_PARAM1 calibration参数,保持默认值20,step1 grid sizeW
CALI_PARAM2 calibration参数,保持默认值4,step1 grid sizeH
CALI_PARAM3 calibration参数,保持默认值8,step2 grid sizeW
CALI_PARAM4 calibration参数,保持默认值8,step2 grid sizeH
CALI_PARAM5 calibration参数,保持默认值10,step2 step number
PD_POS_R PD BLOCK0中R-Masked PD pixel的绝对坐标(Start from (0,0))
PD_POS_L PD BLOCK0中L-Masked PD pixel的绝对坐标(Start from (0,0))
QUALITY_BAYER_PATTERN Output bayer pattern的模式(0: Gr 1: R 2: B 3: Gb)
QUALITY_PD_L_LOCATION PD pixel所在channel [0]B channel, [1]G channel
QUALITY_PD_R_LOCATION PD pixel所在channel [0]B channel, [1]G channel
PDAF Bring Up
Prepare + Driver + EEPROM + PD Buffer Manager + BPCI + Para
PDAF Porting
一、 准备工作
- CAF work 模组INI文档
二、Sensor driver porting
- XXXXmipiraw_Sensor.c
三、读取PD calibration data
- camera_calibration_cam_cal.cpp
- XXXX_pdaf_cal.c 、XXXX_pdafotp.c
四、PD buffer manager porting
- pd_buf_list.cpp
- pd_buf_mgr.cpp
- pd_XXXXmipiraw.cpp、pd_XXXXmipiraw.h
五、lens参数配置——PD部分
- lens_para_XXXXAF.cpp
一、准备工作
1. 确认Contrast AF能清晰对焦
2. 确认当前sensor的PD信息用RAW或VC传输
VC – Virtual Chanel
RAW – raw type (6735 6737T 6738 6739 6750 6753 6755等平台)
PDO (6757 6763 6797 6799及之后平台)
3. 请sensor厂或模组厂提供如下文档和信息:
(1) 模组PDAF calibration使用的.ini文档
(2) 模组 pdaf calibration对应eeprom的layout文档
(3) PDAF calibration时sensor的安装角度(建议正向安装: 0°)
和出图方向(建议与手机实际方向设定一致, 例如不做MirrorFlip
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。