您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
https://www.toutiao.com/a6714594255387492878/

对于自动驾驶系统,如果将感知模块比作人的眼睛和耳朵,那么决策规划模块就是自动驾驶的大脑。
大脑在接收到传感器的各种感知信息之后,对当前环境作出分析,然后下达命令到底层控制模块。
这个过程就是决策规划模块的主要任务。
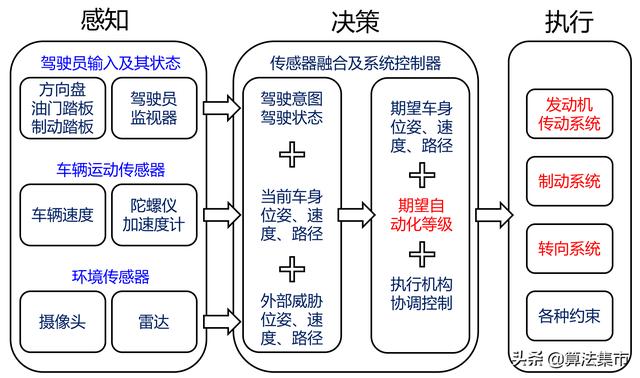
典型的决策规划模块可分为三个层次:
全局路径规划是指:在收到一个目的地信息后,结合高精度地图信息和本车的当前位姿信息,生成一条最优的全局路径,作为后续局部路径规划的参考和引导。
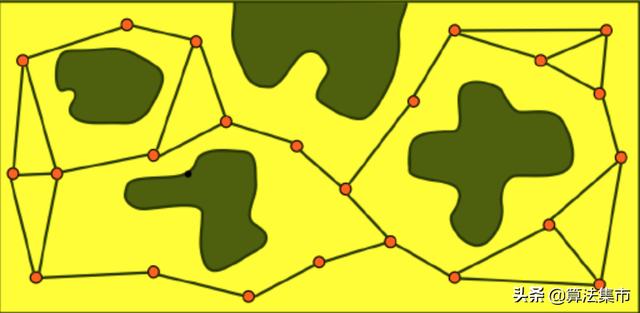
这里的“最优”可以指路径最短、时间最快或必须经过指定点等条件。常见的全局路径规划算法包括Dijkstra、A-Star算法,以及在这两种算法基础上的多种改进。
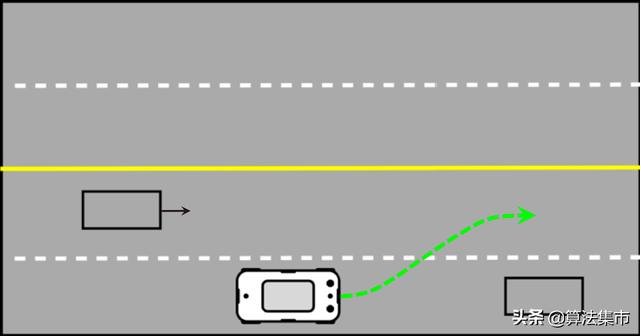
行为决策层是指:在接收到全局路径后,根据从感知模块得到的环境信息(其他车辆、行人等障碍物信息,道路上交通标志、红绿灯等交通规则信息),以及本车当前的行驶路径等状态信息,作出具体的行为决策(如变道超车、跟车行驶、让行、停车、进出站等);
行为决策层用的较多的算法包括:有限状态机、决策树、基于规则的推理模型等。
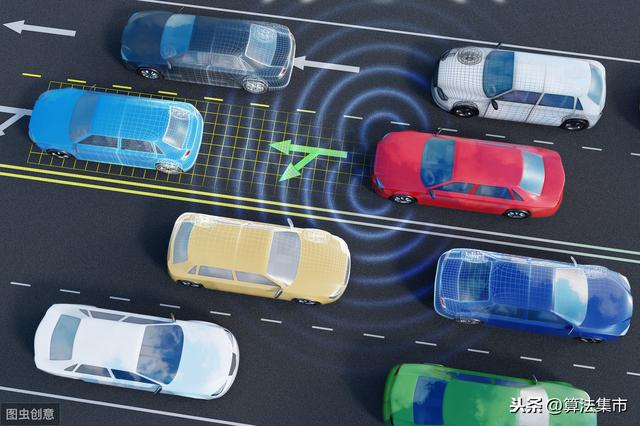
该层有三个难题需要解决:
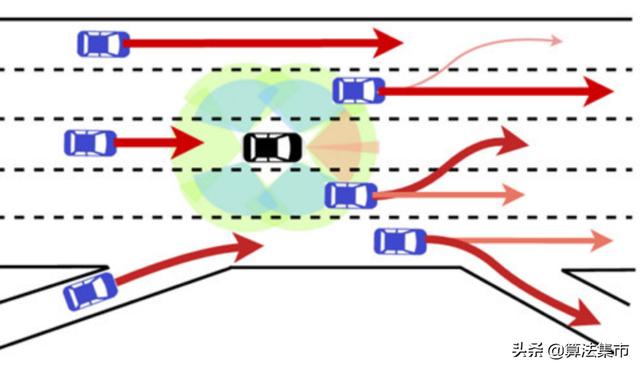
运动规划是指:根据具体的行为决策,生成一条满足各种约束条件(如安全性、平顺性、车辆本身的动力学约束等)的轨迹,该轨迹作为控制模块的输入决定车辆的行驶路径。
运动规划可进一步分为局部路径规划和速度规划,即将“行为”转化成一条更加具体的行驶“轨迹”,从而能够生成一系列控制信号(加速度、方向盘转角、档位、灯光等), 实现车辆的自动行驶。
局部路径规划和速度规划算法,常用的有基于搜索的规划算法,基于采样的规划算法,以及直接优化的方法。
基于S-T图的速度规划介绍-Apollo学习笔记
自动驾驶系统的决策技术介绍-Apollo学习笔记
无人车的避障系统介绍:障碍物的检测、轨迹预测和避障路径生成
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。