您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
今天给大家介绍一下Apollo是怎么加速服务机器人应用落地。文章的内容小编觉得不错,现在给大家分享一下,觉得有需要的朋友可以了解一下,希望对大家有所帮助,下面跟着小编的思路一起来阅读吧。
前段时间,在南岸保时捷中心举办的一场答谢宴中,一台智能服务机器人RS-14引来了现场无数人的目光,它是基于思岚Apollo(阿波罗)机器人底盘研制的一款展厅服务机器人。能在现场完美做到开展导引、导览等功能,最主要的是它能实现自主行走、避障。
Apollo 是思岚科技推出的新一代中小型机器人开发平台,旨在帮助机器人企业加速服务机器人产品的落地,无需在机器人底层行走技术中耗费过多研发成本和精力。同时提供开放的软硬件接口,基于RoboCloud云服务,让机器人开发更简单。
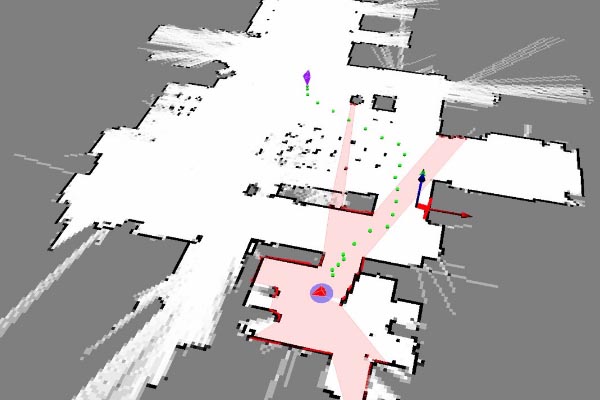
我们都知道机器人实现自主行走的前提是能做到自主定位导航,而Apollo机器人底盘搭载了激光雷达传感器、超声波传感器、防跌落等传感器。并在底盘之上配置深度摄像头传感器。同时配合自主研发的SLAMWARE自主导航定位系统,让机器人实现自主建图定位及导航功能。

当 Apollo 处于未知环境中,无需对环境进行修改,利用SharpEdgeTM精细化构图技术,构建高精度、厘米级别地图,具备超高分辨率,不存在误差累加。同时利用D*动态即时路径规划算法寻找路径并移动到指定地点,无需二次优化修饰,可直接满足人们的使用预期。
除此之外,基于纯软件方式,无需额外进行辅助铺设,可对Apollo进行预定路线设置,或通过设置虚拟墙及虚拟轨道阻止Apollo进入某个工作禁区。
在工作过程中当 Apollo 出现电量过低的情况时,可支持可外部调度的预约式充电自主导航定位,自动返回充电坞充电。
除以上核心功能外,Apollo的扩展接口还集成了网口,供电接口和各种控制接口,以便用户快速进行开发扩展。Apollo可通过有线网络或WIFI与外部通信,其本身自带的电池可为自身与外接的扩展模块供电,用户可通过各种控制接口对整个Apollo及其上层扩展模块进行控制。
以上就是Apollo是怎么加速服务机器人应用落地的全部内容了,更多与Apollo是怎么加速服务机器人应用落地相关的内容可以搜索亿速云之前的文章或者浏览下面的文章进行学习哈!相信小编会给大家增添更多知识,希望大家能够支持一下亿速云!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。