жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
дёҖдёӘзі»з»ҹдёӯеӯҳеңЁзқҖеӨ§йҮҸзҡ„и°ғеәҰд»»еҠЎпјҢеҗҢж—¶и°ғеәҰд»»еҠЎеӯҳеңЁж—¶й—ҙзҡ„ж»һеҗҺжҖ§пјҢиҖҢеӨ§йҮҸзҡ„и°ғеәҰд»»еҠЎеҰӮжһңжҜҸдёҖдёӘйғҪдҪҝз”ЁиҮӘе·ұзҡ„и°ғеәҰеҷЁжқҘз®ЎзҗҶд»»еҠЎзҡ„з”ҹе‘Ҫе‘Ёжңҹзҡ„иҜқпјҢжөӘиҙ№cpuзҡ„иө„жәҗиҖҢдё”еҫҲдҪҺж•ҲгҖӮ
жң¬ж–ҮжқҘд»Ӣз»Қ go-zero дёӯ 延иҝҹж“ҚдҪңпјҢе®ғеҸҜиғҪи®©ејҖеҸ‘иҖ…и°ғеәҰеӨҡдёӘд»»еҠЎж—¶пјҢеҸӘйңҖе…іжіЁе…·дҪ“зҡ„дёҡеҠЎжү§иЎҢеҮҪж•°е’Ңжү§иЎҢж—¶й—ҙгҖҢз«ӢеҚіжҲ–иҖ…延иҝҹгҖҚгҖӮиҖҢ 延иҝҹж“ҚдҪңпјҢйҖҡеёёеҸҜд»ҘйҮҮз”ЁдёӨдёӘж–№жЎҲпјҡ
Timerпјҡе®ҡж—¶еҷЁз»ҙжҠӨдёҖдёӘдјҳе…ҲйҳҹеҲ—пјҢеҲ°ж—¶й—ҙзӮ№жү§иЎҢпјҢ然еҗҺжҠҠйңҖиҰҒжү§иЎҢзҡ„ task еӯҳеӮЁеңЁ map дёӯcollection дёӯзҡ„ timingWheel пјҢз»ҙжҠӨдёҖдёӘеӯҳж”ҫд»»еҠЎз»„зҡ„ж•°з»„пјҢжҜҸдёҖдёӘж§ҪйғҪз»ҙжҠӨдёҖдёӘеӯҳеӮЁtaskзҡ„еҸҢеҗ‘й“ҫиЎЁгҖӮејҖе§Ӣжү§иЎҢж—¶пјҢи®Ўж—¶еҷЁжҜҸйҡ”жҢҮе®ҡж—¶й—ҙжү§иЎҢдёҖдёӘж§ҪйҮҢйқўзҡ„tasksгҖӮ
ж–№жЎҲ2жҠҠз»ҙжҠӨtaskд»Һ дјҳе…ҲйҳҹеҲ— O(nlog(n)) йҷҚеҲ° еҸҢеҗ‘й“ҫиЎЁ O(1)пјҢиҖҢжү§иЎҢtaskд№ҹеҸӘиҰҒиҪ®иҜўдёҖдёӘж—¶й—ҙзӮ№зҡ„tasks O(N)пјҢдёҚйңҖиҰҒеғҸдјҳе…ҲйҳҹеҲ—пјҢж”ҫе…Ҙе’ҢеҲ йҷӨе…ғзҙ O(nlog(n))гҖӮ
жҲ‘们е…ҲзңӢзңӢ go-zero дёӯиҮӘе·ұеҜ№ timingWheel зҡ„дҪҝз”Ё пјҡ
cache дёӯзҡ„ timingWheel
йҰ–е…ҲжҲ‘们е…ҲжқҘеңЁ collection зҡ„ cache дёӯе…ідәҺ timingWheel зҡ„дҪҝз”Ёпјҡ
timingWheel, err := NewTimingWheel(time.Second, slots, func(k, v interface{}) {
key, ok := k.(string)
if !ok {
return
}
cache.Del(key)
})
if err != nil {
return nil, err
}
cache.timingWheel = timingWheel
иҝҷжҳҜ cache еҲқе§ӢеҢ–дёӯд№ҹеҗҢж—¶еҲқе§ӢеҢ– timingWheel еҒҡkeyзҡ„иҝҮжңҹеӨ„зҗҶпјҢеҸӮж•°дҫқж¬Ўд»ЈиЎЁпјҡ
intervalпјҡж—¶й—ҙеҲ’еҲҶеҲ»еәҰnumSlotsпјҡж—¶й—ҙж§Ҫexecuteпјҡж—¶й—ҙзӮ№жү§иЎҢеҮҪж•°еңЁ cache дёӯжү§иЎҢеҮҪж•°еҲҷжҳҜ еҲ йҷӨиҝҮжңҹkeyпјҢиҖҢиҝҷдёӘиҝҮжңҹеҲҷз”ұ timingWheel жқҘжҺ§еҲ¶жҺЁиҝӣж—¶й—ҙгҖӮ
жҺҘдёӢжқҘпјҢе°ұйҖҡиҝҮ cache еҜ№ timingWheel зҡ„дҪҝз”ЁжқҘи®ӨиҜҶгҖӮ
еҲқе§ӢеҢ–
// зңҹжӯЈеҒҡеҲқе§ӢеҢ–
func newTimingWheelWithClock(interval time.Duration, numSlots int, execute Execute, ticker timex.Ticker) (
*TimingWheel, error) {
tw := &TimingWheel{
interval: interval, // еҚ•дёӘж—¶й—ҙж јж—¶й—ҙй—ҙйҡ”
ticker: ticker, // е®ҡж—¶еҷЁпјҢеҒҡж—¶й—ҙжҺЁеҠЁпјҢд»ҘintervalдёәеҚ•дҪҚжҺЁиҝӣ
slots: make([]*list.List, numSlots), // ж—¶й—ҙиҪ®
timers: NewSafeMap(), // еӯҳеӮЁtask{key, value}зҡ„map [жү§иЎҢexecuteжүҖйңҖиҰҒзҡ„еҸӮж•°]
tickedPos: numSlots - 1, // at previous virtual circle
execute: execute, // жү§иЎҢеҮҪж•°
numSlots: numSlots, // еҲқе§ӢеҢ– slots num
setChannel: make(chan timingEntry), // д»ҘдёӢеҮ дёӘchannelжҳҜеҒҡtaskдј йҖ’зҡ„
moveChannel: make(chan baseEntry),
removeChannel: make(chan interface{}),
drainChannel: make(chan func(key, value interface{})),
stopChannel: make(chan lang.PlaceholderType),
}
// жҠҠ slot дёӯеӯҳеӮЁзҡ„ list е…ЁйғЁеҮҶеӨҮеҘҪ
tw.initSlots()
// ејҖеҗҜејӮжӯҘеҚҸзЁӢпјҢдҪҝз”Ё channel жқҘеҒҡtaskйҖҡдҝЎе’Ңдј йҖ’
go tw.run()
return tw, nil
}
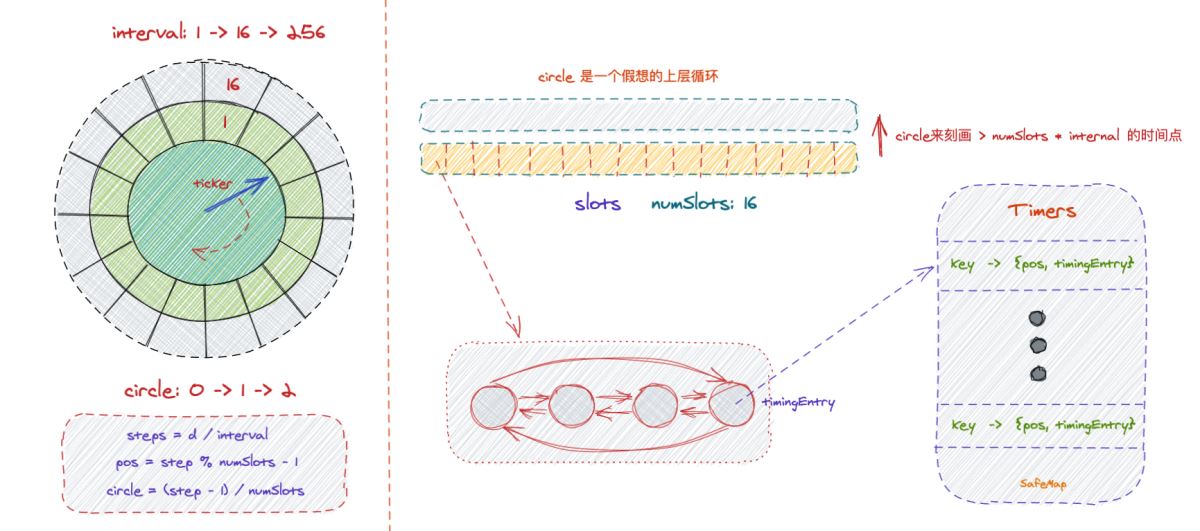
д»ҘдёҠжҜ”иҫғзӣҙи§Ӯеұ•зӨә timingWheel зҡ„ вҖңж—¶й—ҙиҪ®вҖқпјҢеҗҺйқўдјҡеӣҙз»•иҝҷеј еӣҫи§ЈйҮҠе…¶дёӯжҺЁиҝӣзҡ„з»ҶиҠӮгҖӮ
go tw.run() ејҖдёҖдёӘеҚҸзЁӢеҒҡж—¶й—ҙжҺЁеҠЁпјҡ
func (tw *TimingWheel) run() {
for {
select {
// е®ҡж—¶еҷЁеҒҡж—¶й—ҙжҺЁеҠЁ -> scanAndRunTasks()
case <-tw.ticker.Chan():
tw.onTick()
// add task дјҡеҫҖ setChannel иҫ“е…Ҙtask
case task := <-tw.setChannel:
tw.setTask(&task)
...
}
}
}
еҸҜд»ҘзңӢеҮәпјҢеңЁеҲқе§ӢеҢ–зҡ„ж—¶еҖҷе°ұејҖе§ӢдәҶ timer жү§иЎҢпјҢ并д»Ҙinternalж—¶й—ҙж®өиҪ¬еҠЁпјҢ然еҗҺеә•еұӮдёҚеҒңзҡ„иҺ·еҸ–жқҘиҮӘ slot дёӯзҡ„ list зҡ„taskпјҢдәӨз»ҷ execute жү§иЎҢгҖӮ
Task Operation
зҙ§жҺҘзқҖе°ұжҳҜи®ҫзҪ® cache key пјҡ
func (c *Cache) Set(key string, value interface{}) {
c.lock.Lock()
_, ok := c.data[key]
c.data[key] = value
c.lruCache.add(key)
c.lock.Unlock()
expiry := c.unstableExpiry.AroundDuration(c.expire)
if ok {
c.timingWheel.MoveTimer(key, expiry)
} else {
c.timingWheel.SetTimer(key, value, expiry)
}
}
е…ҲзңӢеңЁ data map дёӯжңүжІЎжңүеӯҳеңЁиҝҷдёӘkeyеӯҳеңЁпјҢеҲҷжӣҙж–° expire -> MoveTimer()第дёҖж¬Ўи®ҫзҪ®key -> SetTimer()
жүҖд»ҘеҜ№дәҺ timingWheel зҡ„дҪҝз”ЁдёҠе°ұжё…жҷ°дәҶпјҢејҖеҸ‘иҖ…ж №жҚ®йңҖжұӮеҸҜд»Ҙ add жҲ–жҳҜ updateгҖӮ
еҗҢж—¶жҲ‘们и·ҹжәҗз ҒиҝӣеҺ»дјҡеҸ‘зҺ°пјҡSetTimer() MoveTimer() йғҪжҳҜе°Ҷtaskиҫ“йҖҒеҲ°channelпјҢз”ұ run() дёӯејҖеҗҜзҡ„еҚҸзЁӢдёҚж–ӯеҸ–еҮә channel зҡ„taskж“ҚдҪңгҖӮ
SetTimer() -> setTask()пјҡ
not exist taskпјҡgetPostion -> pushBack to list -> setPositionexist taskпјҡget from timers -> moveTask()
MoveTimer() -> moveTask()
з”ұдёҠйқўзҡ„и°ғз”Ёй“ҫпјҢжңүдёҖдёӘйғҪдјҡи°ғз”Ёзҡ„еҮҪж•°пјҡmoveTask()
func (tw *TimingWheel) moveTask(task baseEntry) {
// timers: Map => йҖҡиҝҮkeyиҺ·еҸ– [positionEntryгҖҢpos, taskгҖҚ]
val, ok := tw.timers.Get(task.key)
if !ok {
return
}
timer := val.(*positionEntry)
// {delay < interval} => 延иҝҹж—¶й—ҙжҜ”дёҖдёӘж—¶й—ҙж јй—ҙйҡ”иҝҳе°ҸпјҢжІЎжңүжӣҙе°Ҹзҡ„еҲ»еәҰпјҢиҜҙжҳҺд»»еҠЎеә”иҜҘз«ӢеҚіжү§иЎҢ
if task.delay < tw.interval {
threading.GoSafe(func() {
tw.execute(timer.item.key, timer.item.value)
})
return
}
// еҰӮжһң > intervalпјҢеҲҷйҖҡиҝҮ 延иҝҹж—¶й—ҙdelay и®Ўз®—е…¶еҮәж—¶й—ҙиҪ®дёӯзҡ„ new pos, circle
pos, circle := tw.getPositionAndCircle(task.delay)
if pos >= timer.pos {
timer.item.circle = circle
// и®°еҪ•еүҚеҗҺзҡ„移еҠЁoffsetгҖӮдёәдәҶеҗҺйқўиҝҮзЁӢйҮҚж–°е…Ҙйҳҹ
timer.item.diff = pos - timer.pos
} else if circle > 0 {
// иҪ¬з§»еҲ°дёӢдёҖеұӮпјҢе°Ҷ circle иҪ¬жҚўдёә diff дёҖйғЁеҲҶ
circle--
timer.item.circle = circle
// еӣ дёәжҳҜдёҖдёӘж•°з»„пјҢиҰҒеҠ дёҠ numSlots [д№ҹе°ұжҳҜзӣёеҪ“дәҺиҰҒиө°еҲ°дёӢдёҖеұӮ]
timer.item.diff = tw.numSlots + pos - timer.pos
} else {
// еҰӮжһң offset жҸҗеүҚдәҶпјҢжӯӨж—¶ task д№ҹиҝҳеңЁз¬¬дёҖеұӮ
// ж Үи®°еҲ йҷӨиҖҒзҡ„ taskпјҢ并йҮҚж–°е…ҘйҳҹпјҢзӯүеҫ…иў«жү§иЎҢ
timer.item.removed = true
newItem := &timingEntry{
baseEntry: task,
value: timer.item.value,
}
tw.slots[pos].PushBack(newItem)
tw.setTimerPosition(pos, newItem)
}
}
д»ҘдёҠиҝҮзЁӢжңүд»ҘдёӢеҮ з§Қжғ…еҶөпјҡ
delay < internalпјҡеӣ дёә < еҚ•дёӘж—¶й—ҙзІҫеәҰпјҢиЎЁзӨәиҝҷдёӘд»»еҠЎе·Із»ҸиҝҮжңҹпјҢйңҖиҰҒ马дёҠжү§иЎҢй’ҲеҜ№ж”№еҸҳзҡ„ delayпјҡnew >= oldпјҡ<newPos, newCircle, diff>newCircle > 0пјҡи®Ўз®—diffпјҢ并е°Ҷ circle иҪ¬жҚўдёә дёӢдёҖеұӮпјҢж•…diff + numslotsеҰӮжһңеҸӘжҳҜеҚ•зәҜ延иҝҹж—¶й—ҙзј©зҹӯпјҢеҲҷе°ҶиҖҒзҡ„taskж Үи®°еҲ йҷӨпјҢйҮҚж–°еҠ е…ҘlistпјҢзӯүеҫ…дёӢдёҖиҪ®loopиў«execute
Execute
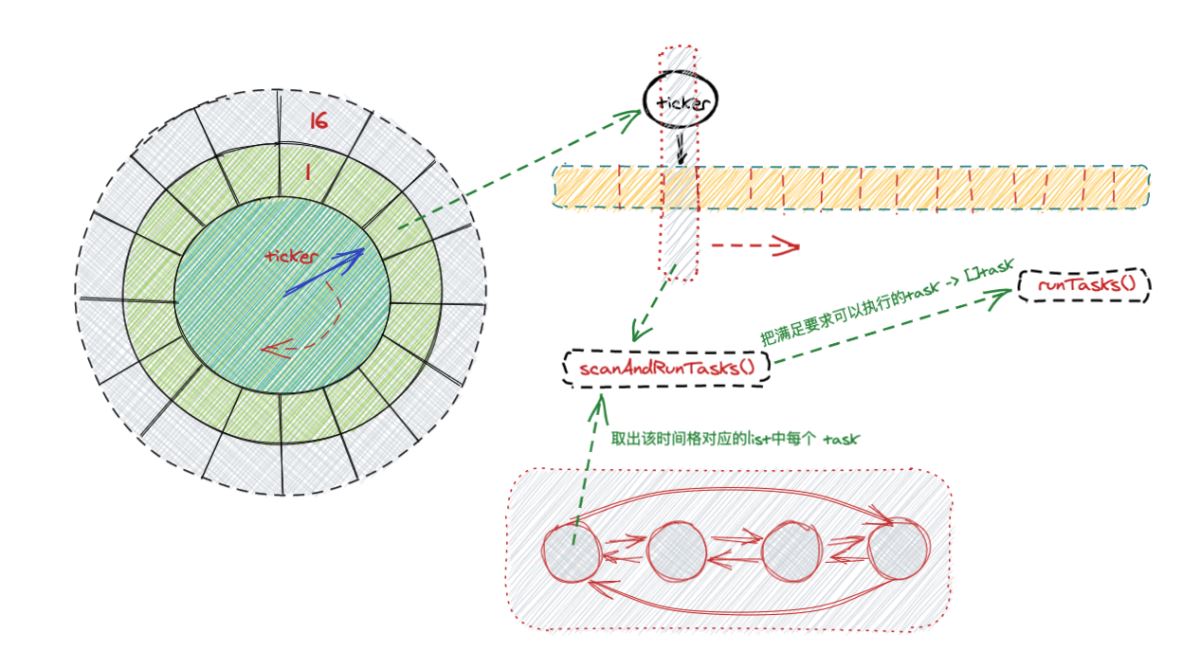
д№ӢеүҚеңЁеҲқе§ӢеҢ–дёӯпјҢrun() дёӯе®ҡж—¶еҷЁзҡ„дёҚж–ӯжҺЁиҝӣпјҢжҺЁиҝӣзҡ„иҝҮзЁӢдё»иҰҒе°ұжҳҜжҠҠ listдёӯзҡ„ task дј з»ҷжү§иЎҢзҡ„ execute funcгҖӮжҲ‘们д»Һе®ҡж—¶еҷЁзҡ„жү§иЎҢејҖе§ӢзңӢпјҡ
// е®ҡж—¶еҷЁ гҖҢжҜҸйҡ” internal дјҡжү§иЎҢдёҖж¬ЎгҖҚ
func (tw *TimingWheel) onTick() {
// жҜҸж¬Ўжү§иЎҢжӣҙж–°дёҖдёӢеҪ“еүҚжү§иЎҢ tick дҪҚзҪ®
tw.tickedPos = (tw.tickedPos + 1) % tw.numSlots
// иҺ·еҸ–жӯӨж—¶ tickдҪҚзҪ® дёӯзҡ„еӯҳеӮЁtaskзҡ„еҸҢеҗ‘й“ҫиЎЁ
l := tw.slots[tw.tickedPos]
tw.scanAndRunTasks(l)
}
зҙ§жҺҘзқҖжҳҜеҰӮдҪ•еҺ»жү§иЎҢ executeпјҡ
func (tw *TimingWheel) scanAndRunTasks(l *list.List) {
// еӯҳеӮЁзӣ®еүҚйңҖиҰҒжү§иЎҢзҡ„task{key, value} [executeжүҖйңҖиҰҒзҡ„еҸӮж•°пјҢдҫқж¬Ўдј йҖ’з»ҷexecuteжү§иЎҢ]
var tasks []timingTask
for e := l.Front(); e != nil; {
task := e.Value.(*timingEntry)
// ж Үи®°еҲ йҷӨпјҢеңЁ scan дёӯеҒҡзңҹжӯЈзҡ„еҲ йҷӨ гҖҢеҲ йҷӨmapзҡ„dataгҖҚ
if task.removed {
next := e.Next()
l.Remove(e)
tw.timers.Del(task.key)
e = next
continue
} else if task.circle > 0 {
// еҪ“еүҚжү§иЎҢзӮ№е·Із»ҸиҝҮжңҹпјҢдҪҶжҳҜеҗҢж—¶дёҚеңЁз¬¬дёҖеұӮпјҢжүҖд»ҘеҪ“еүҚеұӮеҚіз„¶е·Із»Ҹе®ҢжҲҗдәҶпјҢе°ұдјҡйҷҚеҲ°дёӢдёҖеұӮ
// дҪҶжҳҜ并没жңүдҝ®ж”№ pos
task.circle--
e = e.Next()
continue
} else if task.diff > 0 {
// еӣ дёәд№ӢеүҚе·Із»Ҹж ҮжіЁдәҶdiffпјҢйңҖиҰҒеҶҚиҝӣе…ҘйҳҹеҲ—
next := e.Next()
l.Remove(e)
pos := (tw.tickedPos + task.diff) % tw.numSlots
tw.slots[pos].PushBack(task)
tw.setTimerPosition(pos, task)
task.diff = 0
e = next
continue
}
// д»ҘдёҠзҡ„жғ…еҶөйғҪжҳҜдёҚиғҪжү§иЎҢзҡ„жғ…еҶөпјҢиғҪеӨҹжү§иЎҢзҡ„дјҡиў«еҠ е…Ҙtasksдёӯ
tasks = append(tasks, timingTask{
key: task.key,
value: task.value,
})
next := e.Next()
l.Remove(e)
tw.timers.Del(task.key)
e = next
}
// for range tasksпјҢ然еҗҺжҠҠжҜҸдёӘ task->execute жү§иЎҢеҚіеҸҜ
tw.runTasks(tasks)
}
е…·дҪ“зҡ„еҲҶж”Ҝжғ…еҶөеңЁжіЁйҮҠдёӯиҜҙжҳҺдәҶпјҢеңЁзңӢзҡ„ж—¶еҖҷеҸҜд»Ҙе’ҢеүҚйқўзҡ„ moveTask() з»“еҗҲиө·жқҘпјҢе…¶дёӯ circle дёӢйҷҚпјҢdiff зҡ„и®Ўз®—жҳҜе…іиҒ”дёӨдёӘеҮҪж•°зҡ„йҮҚзӮ№гҖӮ
иҮідәҺ diff и®Ўз®—е°ұж¶үеҸҠеҲ° pos, circle зҡ„и®Ўз®—пјҡ
// interval: 4min, d: 60min, numSlots: 16, tickedPos = 15
// step = 15, pos = 14, circle = 0
func (tw *TimingWheel) getPositionAndCircle(d time.Duration) (pos int, circle int) {
steps := int(d / tw.interval)
pos = (tw.tickedPos + steps) % tw.numSlots
circle = (steps - 1) / tw.numSlots
return
}
дёҠйқўзҡ„иҝҮзЁӢеҸҜд»Ҙз®ҖеҢ–жҲҗдёӢйқўпјҡ
steps = d / interval pos = step % numSlots - 1 circle = (step - 1) / numSlots
жҖ»з»“
timingWheel йқ е®ҡж—¶еҷЁжҺЁеҠЁпјҢж—¶й—ҙеүҚиҝӣзҡ„еҗҢж—¶дјҡеҸ–еҮәеҪ“еүҚж—¶й—ҙж јдёӯ listгҖҢеҸҢеҗ‘й“ҫиЎЁгҖҚзҡ„taskпјҢдј йҖ’еҲ° execute дёӯжү§иЎҢгҖӮеӣ дёәжҳҜжҳҜйқ internal еӣәе®ҡж—¶й—ҙеҲ»еәҰжҺЁиҝӣпјҢеҸҜиғҪе°ұдјҡеҮәзҺ°пјҡдёҖдёӘ 60s зҡ„taskпјҢinternal = 1sпјҢиҝҷж ·е°ұдјҡз©әи·‘59ж¬ЎloopгҖӮ
иҖҢеңЁжү©еұ•ж—¶й—ҙдёҠпјҢйҮҮеҸ– circle еҲҶеұӮпјҢиҝҷж ·е°ұеҸҜд»ҘдёҚж–ӯеӨҚз”ЁеҺҹжңүзҡ„ numSlots пјҢеӣ дёәе®ҡж—¶еҷЁеңЁдёҚж–ӯ loopпјҢиҖҢжү§иЎҢеҸҜд»ҘжҠҠдёҠеұӮзҡ„ slot дёӢйҷҚеҲ°дёӢеұӮпјҢеңЁдёҚж–ӯ loop дёӯе°ұеҸҜд»Ҙжү§иЎҢеҲ°дёҠеұӮзҡ„taskгҖӮиҝҷж ·зҡ„и®ҫи®ЎеҸҜд»ҘеңЁдёҚеҲӣйҖ йўқеӨ–зҡ„ж•°жҚ®з»“жһ„пјҢзӘҒз ҙй•ҝж—¶й—ҙзҡ„йҷҗеҲ¶гҖӮ
еҗҢж—¶еңЁ go-zero дёӯиҝҳжңүеҫҲеӨҡе®һз”Ёзҡ„组件е·Ҙе…·пјҢз”ЁеҘҪе·Ҙе…·еҜ№дәҺжҸҗеҚҮжңҚеҠЎжҖ§иғҪе’ҢејҖеҸ‘ж•ҲзҺҮйғҪжңүеҫҲеӨ§зҡ„её®еҠ©пјҢеёҢжңӣжң¬зҜҮж–Үз« иғҪз»ҷеӨ§е®¶еёҰжқҘдёҖдәӣ收иҺ·гҖӮ
йЎ№зӣ®ең°еқҖ
https://github.com/tal-tech/go-zero
еҘҪжңӘжқҘжҠҖжңҜ
еҲ°жӯӨиҝҷзҜҮе…ідәҺgo-zero еҰӮдҪ•еә”еҜ№жө·йҮҸе®ҡж—¶/延иҝҹд»»еҠЎзҡ„ж–Үз« е°ұд»Ӣз»ҚеҲ°иҝҷдәҶ,жӣҙеӨҡзӣёе…іgo-zeroе®ҡж—¶/延иҝҹд»»еҠЎеҶ…е®№иҜ·жҗңзҙўдәҝйҖҹдә‘д»ҘеүҚзҡ„ж–Үз« жҲ–继з»ӯжөҸи§ҲдёӢйқўзҡ„зӣёе…іж–Үз« еёҢжңӣеӨ§е®¶д»ҘеҗҺеӨҡеӨҡж”ҜжҢҒдәҝйҖҹдә‘пјҒ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ