您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章给大家分享的是有关python如何实现高斯模糊的内容。小编觉得挺实用的,因此分享给大家做个参考,一起跟随小编过来看看吧。
高斯模糊是一种常见的模糊技术,相关知识点有:高斯函数、二维卷积。
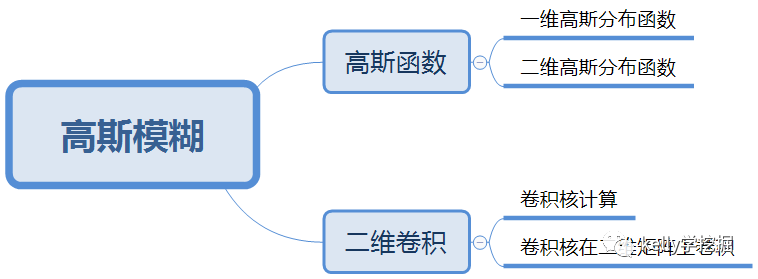
一维(连续变量)高斯函数形式如下,高斯函数又称“正态分布函数”:
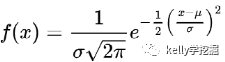
μ是分布函数的均值(或者期望),sigma是标准差。
一维高斯分布函数的图形:
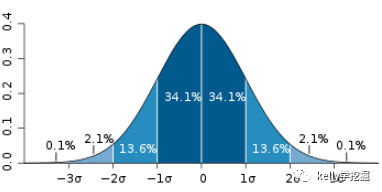
从图可知,以x=0为中心,x取值距离中心越近,概率密度函数值越大,距离中心越远,密度函数值越小。
二维高斯分布函数的形式:

特别说明,当变量x和y相互独立时,则相关系数ρ=0,二维高斯分布函数可以简化为:

二维高斯分布函数的图形:
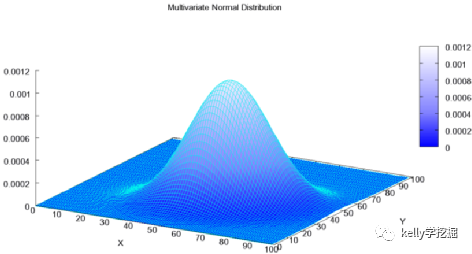
对于一维高斯分布,函数中心是平面上的一个点;而对于二维高斯分布,函数中心是一个三维立体空间上的一个点,即上图中山峰的最顶端处的点。
高斯模糊本质上一种数据平滑技术,可以用于一维、二维甚至多维空间。数据经高斯模糊处理之后,数据会趋向于周边邻近的其他数据,导致各个数据“趋同”。
在图像领域,各个位置的像素值使用“周边邻居像素点加权平均”重新赋值。对于每个像素点,由于计算时均以当前像素点为中心,所以均值μ=0。使用时有2个超参数需要设置:高斯核大小和高斯函数标准差σ。高斯核大小表示“影响当前点的最大邻域范围”,而标准差表示“邻域中的其他像素点对当前点的影响力”。
从下而上观察下图各个函数图像,各个函数的均值相同,而方差逐步减小。
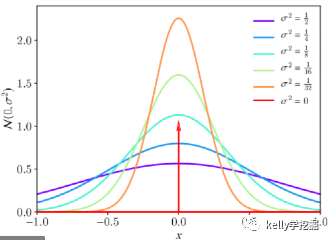
方差衡量数据的分散程度,方差越大,数据越分散,图形就越扁平,数据的集中趋势越弱,应用到高斯模糊中方差越大图形越模糊。
(1)如何计算高斯卷积核
3×3大小的高斯卷积核的计算示意图
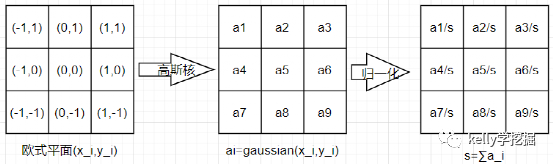
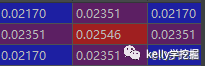
直接计算二维高斯函数值后,卷积核的各个位置取值(截图自pycharm的debug):
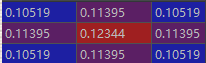
卷积核归一化后的各个位置取值(截图自pycharm的debug):
高斯卷积核的python代码:
def gaussian_kernel(self): kernel = np.zeros(shape=(self.kernel_size, self.kernel_size), dtype=np.float) radius = self.kernel_size//2 for y in range(-radius, radius + 1): # [-r, r] for x in range(-radius, radius + 1): # 二维高斯函数 v = 1.0 / (2 * np.pi * self.sigma ** 2) * np.exp(-1.0 / (2 * self.sigma ** 2) * (x ** 2 + y ** 2)) kernel[y + radius, x + radius] = v # 高斯函数的x和y值 vs 高斯核的下标值 kernel2 = kernel / np.sum(kernel) return kernel2
(2)如何在二维图像上进行卷积
对于二维矩阵,卷积时卷积核从左向右、从上而下的滑动,对应位置求加权和。一般图像是RGB三通道,需要逐个通道卷积,每个通道是一个二维矩阵。灰度图只有一个通道,直接卷积即可。
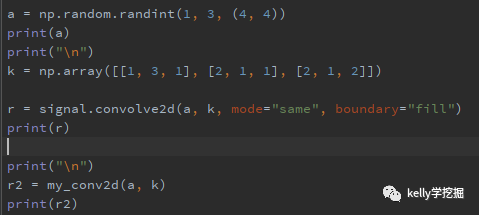
自行实现的二维离散卷积的python代码:
def my_conv2d(inputs: np.ndarray, kernel: np.ndarray): # 计算需要填充的行列数目,这里假定mode为“same” # 一般卷积核的hw都是奇数,这里实现方式也是基于奇数尺寸的卷积核 h, w = inputs.shape kernel = kernel[::-1, ...][..., ::-1] # 卷积的定义,必须旋转180度 h2, w1 = kernel.shape h_pad = (h2 - 1) // 2 w_pad = (w1 - 1) // 2 inputs = np.pad(inputs, pad_width=[(h_pad, h_pad), (w_pad, w_pad)], mode="constant", constant_values=0) outputs = np.zeros(shape=(h, w)) for i in range(h): # 行号 for j in range(w): # 列号 outputs[i, j] = np.sum(np.multiply(inputs[i: i + h2, j: j + w1], kernel)) return outputs
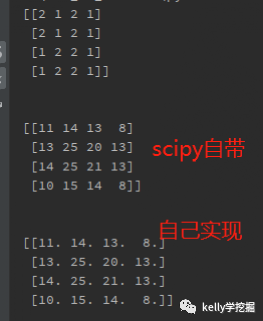
scipy中已经提供二维卷积函数scipy.signal.convolve2d,可以直接调用,下图是和自行实现的对比效果。
运行之后结果一致,验证自行实现的二维卷积正确。
补充:scipy.signal.convolve2d的参数说明
in1:输入矩阵
in2:卷积核
mode:指示输出矩阵的尺寸,full代表完全离散线性卷积, valid代表输出尺寸等于输入尺寸-卷积核+1, same代表输出尺寸与输入尺寸一致。
boundary:需要填充时边界填充方式,fill代表使用常量值填充, wrap代表循环方式填充, symm代表以四周边为对称轴对称填充。
fillvalue:常量填充时的填充值
完整的python代码
class GaussianBlur(object):
def __init__(self, kernel_size=3, sigma=1.5):
self.kernel_size = kernel_size
self.sigma = sigma
self.kernel = self.gaussian_kernel()
def gaussian_kernel(self):
kernel = np.zeros(shape=(self.kernel_size, self.kernel_size), dtype=np.float)
radius = self.kernel_size//2
for y in range(-radius, radius + 1): # [-r, r]
for x in range(-radius, radius + 1):
# 二维高斯函数
v = 1.0 / (2 * np.pi * self.sigma ** 2) * np.exp(-1.0 / (2 * self.sigma ** 2) * (x ** 2 + y ** 2))
kernel[y + radius, x + radius] = v # 高斯函数的x和y值 vs 高斯核的下标值
kernel2 = kernel / np.sum(kernel)
return kernel2
def filter(self, img: Image.Image):
img_arr = np.array(img)
if len(img_arr.shape) == 2:
new_arr = signal.convolve2d(img_arr, self.kernel, mode="same", boundary="symm")
else:
h, w, c = img_arr.shape
new_arr = np.zeros(shape=(h, w, c), dtype=np.float)
for i in range(c):
new_arr[..., i] = signal.convolve2d(img_arr[..., i], self.kernel, mode="same", boundary="symm")
new_arr = np.array(new_arr, dtype=np.uint8)
return Image.fromarray(new_arr)
def main():
img = Image.open("Jeep-cd.jpg").convert("RGB")
img2 = GaussianBlur(sigma=2.5).filter(img)
plt.subplot(1, 2, 1)
plt.imshow(img)
plt.subplot(1, 2, 2)
plt.imshow(img2)
# dpi参数维持图片的清晰度
plt.savefig("gaussian.jpg", dpi=500)
plt.show()
pass代码运行效果,发现经高斯模糊处理之后,图片发生明显模糊。


1、云计算,典型应用OpenStack。2、WEB前端开发,众多大型网站均为Python开发。3.人工智能应用,基于大数据分析和深度学习而发展出来的人工智能本质上已经无法离开python。4、系统运维工程项目,自动化运维的标配就是python+Django/flask。5、金融理财分析,量化交易,金融分析。6、大数据分析。
感谢各位的阅读!关于“python如何实现高斯模糊”这篇文章就分享到这里了,希望以上内容可以对大家有一定的帮助,让大家可以学到更多知识,如果觉得文章不错,可以把它分享出去让更多的人看到吧!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。