жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
жң¬зҜҮеҶ…е®№дё»иҰҒи®Іи§ЈвҖңCиҜӯиЁҖдёӯзҡ„зҠ¶жҖҒжңәжҳҜд»Җд№ҲвҖқпјҢж„ҹе…ҙи¶Јзҡ„жңӢеҸӢдёҚеҰЁжқҘзңӢзңӢгҖӮжң¬ж–Үд»Ӣз»Қзҡ„ж–№жі•ж“ҚдҪңз®ҖеҚ•еҝ«жҚ·пјҢе®һз”ЁжҖ§ејәгҖӮдёӢйқўе°ұи®©е°Ҹзј–жқҘеёҰеӨ§е®¶еӯҰд№ вҖңCиҜӯиЁҖдёӯзҡ„зҠ¶жҖҒжңәжҳҜд»Җд№ҲвҖқеҗ§!
жң¬ж–ҮдёҚжҳҜе…ідәҺиҪҜ件зҠ¶жҖҒжңәзҡ„жңҖдҪіи®ҫи®ЎеҲҶи§Је®һи·өзҡ„ж•ҷзЁӢгҖӮжҲ‘е°ҶйҮҚзӮ№е…іжіЁзҠ¶жҖҒжңәд»Јз Ғе’Ңз®ҖеҚ•зҡ„зӨәдҫӢпјҢиҝҷдәӣзӨәдҫӢе…·жңүи¶іеӨҹзҡ„еӨҚжқӮжҖ§пјҢд»ҘдҫҝдәҺзҗҶи§Јзү№жҖ§е’Ңз”Ёжі•гҖӮ
еӨ§еӨҡж•°зЁӢеәҸе‘ҳеёёз”Ёзҡ„и®ҫи®ЎжҠҖжңҜжҳҜжңүйҷҗзҠ¶жҖҒжңә(FSM)гҖӮи®ҫи®Ўдәәе‘ҳдҪҝз”ЁжӯӨзј–зЁӢз»“жһ„е°ҶеӨҚжқӮзҡ„й—®йўҳеҲҶи§ЈдёәеҸҜз®ЎзҗҶзҡ„зҠ¶жҖҒе’ҢзҠ¶жҖҒиҪ¬жҚўгҖӮжңүж— ж•°з§Қе®һзҺ°зҠ¶жҖҒжңәзҡ„ж–№жі•гҖӮ
A switchиҜӯеҸҘжҸҗдҫӣдәҶзҠ¶жҖҒжңәжңҖе®№жҳ“е®һзҺ°е’ҢжңҖеёёи§Ғзҡ„зүҲжң¬д№ӢдёҖгҖӮеңЁиҝҷйҮҢпјҢжҜҸдёӘжЎҲдҫӢеңЁswitchиҜӯеҸҘжҲҗдёәдёҖдёӘзҠ¶жҖҒпјҢе®һзҺ°еҰӮдёӢжүҖзӨәпјҡ
switch (currentState) { case ST_IDLE: // do something in the idle state break; case ST_STOP: // do something in the stop state break; // etc... }иҝҷз§Қж–№жі•еҪ“然йҖӮеҗҲдәҺи§ЈеҶіи®ёеӨҡдёҚеҗҢзҡ„и®ҫи®Ўй—®йўҳгҖӮ然иҖҢпјҢеңЁдәӢ件й©ұеҠЁзҡ„еӨҡзәҝзЁӢйЎ№зӣ®дёҠдҪҝз”Ёж—¶пјҢиҝҷз§ҚеҪўејҸзҡ„зҠ¶жҖҒжңәеҸҜиғҪжҳҜйқһеёёжңүйҷҗзҡ„гҖӮ
第дёҖдёӘй—®йўҳжҳҜжҺ§еҲ¶е“ӘдәӣзҠ¶жҖҒиҪ¬жҚўжҳҜжңүж•Ҳзҡ„пјҢе“ӘдәӣжҳҜж— ж•Ҳзҡ„гҖӮж— жі•ејәеҲ¶жү§иЎҢзҠ¶жҖҒиҪ¬жҚўи§„еҲҷгҖӮд»»дҪ•иҝҮжёЎйғҪеҸҜд»ҘеңЁд»»дҪ•ж—¶еҖҷиҝӣиЎҢпјҢиҝҷ并дёҚжҳҜзү№еҲ«еҸҜеҸ–зҡ„гҖӮеҜ№дәҺеӨ§еӨҡж•°и®ҫи®ЎпјҢеҸӘжңүе°‘ж•°иҪ¬жҚўжЁЎејҸжҳҜжңүж•Ҳзҡ„гҖӮзҗҶжғіжғ…еҶөдёӢпјҢиҪҜ件и®ҫи®Ўеә”иҜҘејәеҲ¶жү§иЎҢиҝҷдәӣйў„е®ҡд№үзҡ„зҠ¶жҖҒеәҸеҲ—пјҢ并йҳІжӯўдёҚеҝ…иҰҒзҡ„иҪ¬жҚўгҖӮеҪ“иҜ•еӣҫе°Ҷж•°жҚ®еҸ‘йҖҒеҲ°зү№е®ҡзҠ¶жҖҒж—¶пјҢдјҡеҮәзҺ°еҸҰдёҖдёӘй—®йўҳгҖӮз”ұдәҺж•ҙдёӘзҠ¶жҖҒжңәдҪҚдәҺеҚ•дёӘеҮҪж•°дёӯпјҢеӣ жӯӨеҗ‘д»»дҪ•з»ҷе®ҡзҠ¶жҖҒеҸ‘йҖҒйўқеӨ–ж•°жҚ®йғҪжҳҜеӣ°йҡҫзҡ„гҖӮжңҖеҗҺпјҢиҝҷдәӣи®ҫи®ЎеҫҲе°‘йҖӮеҗҲеңЁеӨҡзәҝзЁӢзі»з»ҹдёӯдҪҝз”ЁгҖӮи®ҫи®ЎеҷЁеҝ…йЎ»зЎ®дҝқзҠ¶жҖҒжңәжҳҜд»ҺеҚ•дёӘжҺ§еҲ¶зәҝзЁӢи°ғз”Ёзҡ„гҖӮ
дҪҝз”ЁзҠ¶жҖҒжңәе®һзҺ°д»Јз ҒжҳҜи§ЈеҶіеӨҚжқӮе·ҘзЁӢй—®йўҳзҡ„дёҖз§Қйқһеёёж–№дҫҝзҡ„и®ҫи®ЎжҠҖжңҜгҖӮзҠ¶жҖҒжңәе°Ҷи®ҫи®ЎеҲҶи§ЈдёәдёҖзі»еҲ—жӯҘйӘӨпјҢжҲ–еңЁзҠ¶жҖҒжңәжңҜиҜӯдёӯз§°дёәзҠ¶жҖҒгҖӮжҜҸдёӘзҠ¶жҖҒйғҪжү§иЎҢдёҖдәӣзӢӯд№үзҡ„д»»еҠЎгҖӮеҸҰдёҖж–№йқўпјҢдәӢ件жҳҜдёҖз§ҚеҲәжҝҖпјҢе®ғеҜјиҮҙзҠ¶жҖҒжңәеңЁзҠ¶жҖҒд№Ӣй—ҙ移еҠЁжҲ–иҝҮжёЎгҖӮ
дёҫдёҖдёӘз®ҖеҚ•зҡ„дҫӢеӯҗпјҢжҲ‘е°ҶеңЁжң¬ж–ҮдёӯдҪҝз”Ёе®ғпјҢеҒҮи®ҫжҲ‘们жӯЈеңЁи®ҫи®Ўз”өжңәжҺ§еҲ¶иҪҜ件гҖӮжҲ‘们жғіеҗҜеҠЁе’ҢеҒңжӯўз”өжңәпјҢд»ҘеҸҠж”№еҸҳз”өжңәзҡ„йҖҹеәҰгҖӮеҫҲз®ҖеҚ•гҖӮеҗ‘е®ўжҲ·з«ҜиҪҜ件公ејҖзҡ„з”өжңәжҺ§еҲ¶дәӢ件еҰӮдёӢпјҡ
и®ҫе®ҡйҖҹеәҰ-и®ҫе®ҡз”өжңәд»Ҙзү№е®ҡйҖҹеәҰиЎҢ驶
з«ҷдҪҸ-еҒңжӯўй©¬иҫҫ
иҝҷдәӣдәӢ件жҸҗдҫӣдәҶд»Ҙд»»дҪ•йҖҹеәҰеҗҜеҠЁз”өжңәзҡ„иғҪеҠӣпјҢиҝҷд№ҹж„Ҹе‘ізқҖж”№еҸҳе·Із»Ҹ移еҠЁзҡ„з”өжңәзҡ„йҖҹеәҰгҖӮжҲ–иҖ…жҲ‘们еҸҜд»Ҙе®Ңе…ЁеҒңжӯўй©¬иҫҫгҖӮеҜ№дәҺз”өжңәжҺ§еҲ¶жЁЎеқ—пјҢиҝҷдёӨдёӘдәӢ件жҲ–еҠҹиғҪиў«и®ӨдёәжҳҜеӨ–йғЁдәӢ件.然иҖҢпјҢеҜ№дәҺдҪҝз”ЁжҲ‘们зҡ„д»Јз Ғзҡ„е®ўжҲ·жңәжқҘиҜҙпјҢиҝҷдәӣеҸӘжҳҜжҷ®йҖҡзҡ„еҮҪж•°гҖӮ
иҝҷдәӣдәӢ件дёҚжҳҜзҠ¶жҖҒжңәзҠ¶жҖҒгҖӮеӨ„зҗҶиҝҷдёӨдёӘдәӢ件жүҖйңҖзҡ„жӯҘйӘӨжҳҜдёҚеҗҢзҡ„гҖӮеңЁиҝҷз§Қжғ…еҶөдёӢпјҢеҗ„е·һжҳҜпјҡ
й—Іж•Ј-马иҫҫдёҚжҳҜж—ӢиҪ¬зҡ„пјҢиҖҢжҳҜйқҷжӯўзҡ„
ж— жүҖдәӢдәӢ
еҗҜеҠЁ-д»Һжӯ»иғЎеҗҢеҗҜеҠЁй©¬иҫҫ
ејҖеҗҜз”өеҠЁжңәз”өжәҗ
и®ҫе®ҡз”өжңәиҪ¬йҖҹ
еҸҳйҖҹ-и°ғж•ҙе·Із»Ҹ移еҠЁзҡ„马иҫҫзҡ„йҖҹеәҰ
ж”№еҸҳз”өжңәиҪ¬йҖҹ
еҒң-еҒңжӯўз§»еҠЁзҡ„马иҫҫ
е…ій—ӯз”өеҠЁжңәз”өжәҗ
иҝӣе…Ҙй—ІзҪ®зҠ¶жҖҒ
еҸҜд»ҘзңӢеҮәпјҢе°Ҷз”өжңәжҺ§еҲ¶еҲҶи§ЈдёәзҰ»ж•ЈзҠ¶жҖҒпјҢиҖҢдёҚжҳҜеҚ•дёҖзҡ„еҠҹиғҪпјҢжҲ‘们еҸҜд»Ҙжӣҙе®№жҳ“ең°з®ЎзҗҶеҰӮдҪ•ж“ҚдҪңз”өжңәзҡ„规еҲҷгҖӮ
жҜҸдёӘзҠ¶жҖҒжңәйғҪжңүвҖңеҪ“еүҚзҠ¶жҖҒвҖқзҡ„жҰӮеҝөгҖӮиҝҷжҳҜзҠ¶жҖҒжңәеҪ“еүҚжүҖеӨ„зҡ„зҠ¶жҖҒгҖӮеңЁд»»дҪ•з»ҷе®ҡзҡ„ж—¶еҲ»пјҢзҠ¶жҖҒжңәеҸӘиғҪеӨ„дәҺеҚ•дёҖзҠ¶жҖҒгҖӮзү№е®ҡзҠ¶жҖҒжңәе®һдҫӢзҡ„жҜҸдёӘе®һдҫӢеңЁе®ҡд№үж—¶йғҪеҸҜд»Ҙи®ҫзҪ®еҲқе§ӢзҠ¶жҖҒгҖӮдҪҶжҳҜпјҢиҜҘеҲқе§ӢзҠ¶жҖҒеңЁеҜ№иұЎеҲӣе»әжңҹй—ҙдёҚжү§иЎҢгҖӮеҸӘжңүеҸ‘йҖҒеҲ°зҠ¶жҖҒжңәзҡ„дәӢ件жүҚдјҡеҜјиҮҙжү§иЎҢзҠ¶жҖҒеҮҪж•°гҖӮ
дёәдәҶеӣҫеҪўеҢ–ең°иҜҙжҳҺзҠ¶жҖҒе’ҢдәӢ件пјҢжҲ‘们дҪҝз”ЁзҠ¶жҖҒеӣҫгҖӮдёӢйқўзҡ„еӣҫ1жҳҫзӨәдәҶз”өжңәжҺ§еҲ¶жЁЎеқ—зҡ„зҠ¶жҖҒиҪ¬жҚўгҖӮжЎҶиЎЁзӨәзҠ¶жҖҒпјҢиҝһжҺҘз®ӯеӨҙиЎЁзӨәдәӢ件иҪ¬жҚўгҖӮеҲ—еҮәдәӢ件еҗҚз§°зҡ„з®ӯеӨҙжҳҜеӨ–йғЁдәӢ件пјҢиҖҢжңӘиЈ…йҘ°зҡ„иЎҢиў«и®ӨдёәжҳҜеҶ…йғЁдәӢ件гҖӮ(жң¬ж–ҮеҗҺйқўе°Ҷд»Ӣз»ҚеҶ…йғЁдәӢ件е’ҢеӨ–йғЁдәӢ件д№Ӣй—ҙзҡ„е·®ејӮгҖӮ)
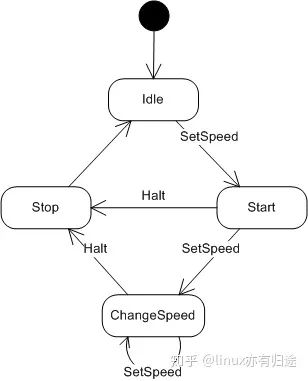
еӣҫ1пјҡз”өжңәзҠ¶жҖҒеӣҫ
еҰӮжӮЁжүҖи§ҒпјҢеҪ“дәӢ件еңЁзҠ¶жҖҒиҪ¬жҚўдёӯеҮәзҺ°ж—¶пјҢжүҖеҸ‘з”ҹзҡ„зҠ¶жҖҒиҪ¬жҚўеҸ–еҶідәҺзҠ¶жҖҒжңәзҡ„еҪ“еүҚзҠ¶жҖҒгҖӮеҪ“SetSpeedдәӢ件еҮәзҺ°пјҢдҫӢеҰӮпјҢз”өжңәеңЁIdleзҠ¶жҖҒпјҢеҲҷиҪ¬жҚўдёәStartзҠ¶жҖҒгҖӮ然иҖҢпјҢеҗҢж ·зҡ„SetSpeedеҪ“еүҚзҠ¶жҖҒдёәStartе°Ҷз”өжңәиҪ¬жҚўдёәChangeSpeedзҠ¶жҖҒгҖӮжӮЁиҝҳеҸҜд»ҘзңӢеҲ°пјҢ并йқһжүҖжңүзҡ„зҠ¶жҖҒиҪ¬жҚўйғҪжҳҜжңүж•Ҳзҡ„гҖӮдҫӢеҰӮпјҢ马иҫҫдёҚиғҪд»ҺChangeSpeedеҲ°IdleиҖҢдёҚйңҖиҰҒе…ҲйҖҡиҝҮStopзҠ¶жҖҒгҖӮ
з®ҖиҖҢиЁҖд№ӢпјҢдҪҝз”ЁзҠ¶жҖҒжңәжҚ•иҺ·е’Ңжү§иЎҢеӨҚжқӮзҡ„дәӨдә’пјҢеҗҰеҲҷеҸҜиғҪеҫҲйҡҫдј йҖ’е’Ңе®һзҺ°гҖӮ
жӯЈеҰӮжҲ‘еүҚйқўжҸҗеҲ°зҡ„пјҢдәӢ件жҳҜеҜјиҮҙзҠ¶жҖҒжңәеңЁзҠ¶жҖҒд№Ӣй—ҙиҪ¬жҚўзҡ„еҲәжҝҖгҖӮдҫӢеҰӮпјҢжҢүдёӢжҢүй’®еҸҜиғҪжҳҜдёҖдёӘдәӢ件гҖӮдәӢ件еҸҜд»ҘеҲҶдёәдёӨзұ»пјҡеӨ–йғЁдәӢ件е’ҢеҶ…йғЁдәӢ件гҖӮеӨ–йғЁдәӢ件пјҢеңЁе…¶жңҖеҹәжң¬зҡ„зә§еҲ«дёҠпјҢжҳҜеҜ№зҠ¶жҖҒжңәжЁЎеқ—зҡ„еҮҪж•°и°ғз”Ё.иҝҷдәӣеҮҪж•°жҳҜе…¬е…ұзҡ„пјҢд»ҺеӨ–йғЁи°ғз”ЁпјҢжҲ–иҖ…д»ҺеӨ–йғЁд»Јз Ғи°ғз”ЁеҲ°зҠ¶жҖҒжңәеҜ№иұЎгҖӮзі»з»ҹдёӯзҡ„д»»дҪ•зәҝзЁӢжҲ–д»»еҠЎйғҪеҸҜд»Ҙз”ҹжҲҗеӨ–йғЁдәӢ件гҖӮеҰӮжһңеӨ–йғЁдәӢ件еҮҪж•°и°ғз”ЁеҜјиҮҙзҠ¶жҖҒиҪ¬жҚўеҸ‘з”ҹпјҢеҲҷзҠ¶жҖҒе°ҶеңЁи°ғз”Ёж–№зҡ„жҺ§еҲ¶зәҝзЁӢеҶ…еҗҢжӯҘжү§иЎҢгҖӮеҸҰдёҖж–№йқўпјҢеҶ…йғЁдәӢ件жҳҜз”ұзҠ¶жҖҒжңәжң¬иә«еңЁзҠ¶жҖҒжү§иЎҢжңҹй—ҙиҮӘиЎҢз”ҹжҲҗзҡ„гҖӮ
е…ёеһӢзҡ„еңәжҷҜз”ұз”ҹжҲҗзҡ„еӨ–йғЁдәӢ件组жҲҗпјҢиҜҘдәӢ件еҗҢж ·еҸҜд»ҘеҪ’з»“дёәжЁЎеқ—зҡ„е…¬е…ұжҺҘеҸЈдёӯзҡ„еҮҪж•°и°ғз”ЁгҖӮж №жҚ®жӯЈеңЁз”ҹжҲҗзҡ„дәӢ件е’ҢзҠ¶жҖҒжңәзҡ„еҪ“еүҚзҠ¶жҖҒпјҢжү§иЎҢжҹҘжүҫд»ҘзЎ®е®ҡжҳҜеҗҰйңҖиҰҒиҪ¬жҚўгҖӮеҰӮжһңжҳҜиҝҷж ·пјҢзҠ¶жҖҒжңәе°ҶиҪ¬жҚўеҲ°ж–°зҠ¶жҖҒпјҢ并жү§иЎҢиҜҘзҠ¶жҖҒзҡ„д»Јз ҒгҖӮеңЁзҠ¶жҖҒеҮҪж•°зҡ„жң«е°ҫпјҢжү§иЎҢжЈҖжҹҘд»ҘзЎ®е®ҡжҳҜеҗҰз”ҹжҲҗдәҶеҶ…йғЁдәӢ件гҖӮеҰӮжһңжҳҜиҝҷж ·пјҢеҲҷжү§иЎҢеҸҰдёҖдёӘиҪ¬жҚўпјҢ并且新зҡ„зҠ¶жҖҒжңүжңәдјҡжү§иЎҢгҖӮжӯӨиҝҮзЁӢе°Ҷ继з»ӯиҝӣиЎҢпјҢзӣҙеҲ°зҠ¶жҖҒжңәдёҚеҶҚз”ҹжҲҗеҶ…йғЁдәӢ件пјҢжӯӨж—¶еҺҹе§ӢеӨ–йғЁдәӢ件еҮҪж•°и°ғз”Ёе°Ҷиҝ”еӣһгҖӮеӨ–йғЁдәӢ件е’ҢжүҖжңүеҶ…йғЁдәӢ件(еҰӮжһңжңүзҡ„иҜқ)еңЁи°ғз”ЁиҖ…зҡ„жҺ§еҲ¶зәҝзЁӢдёӯжү§иЎҢгҖӮ
дёҖж—ҰеӨ–йғЁдәӢ件еҗҜеҠЁзҠ¶жҖҒжңәжү§иЎҢпјҢе®ғдёҚиғҪиў«еҸҰдёҖдёӘеӨ–йғЁдәӢ件дёӯж–ӯпјҢзӣҙеҲ°еӨ–йғЁдәӢ件е’ҢжүҖжңүеҶ…йғЁдәӢ件已з»Ҹе®ҢжҲҗжү§иЎҢпјҢеҰӮжһңдҪҝз”Ёй”ҒгҖӮиҝҷдёӘиҝҗиЎҢеҲ°е®ҢжҲҗжЁЎеһӢдёәзҠ¶жҖҒиҪ¬жҚўжҸҗдҫӣдәҶдёҖдёӘеӨҡзәҝзЁӢе®үе…Ёзҡ„зҺҜеўғгҖӮеҸҜд»ҘеңЁзҠ¶жҖҒжңәеј•ж“ҺдёӯдҪҝз”ЁдҝЎеҸ·йҮҸжҲ–дә’ж–ҘйҮҸжқҘйҳ»жӯўеҸҜиғҪеҗҢж—¶и®ҝй—®еҗҢдёҖзҠ¶жҖҒжңәе®һдҫӢзҡ„е…¶д»–зәҝзЁӢгҖӮи§Ғжәҗд»Јз ҒеҮҪж•°_SM_ExternalEvent()е…ідәҺй”Ғзҡ„дҪҚзҪ®зҡ„жіЁйҮҠгҖӮ
з”ҹжҲҗдәӢ件时пјҢе®ғеҸҜд»ҘйҖүжӢ©йҷ„еҠ дәӢ件数жҚ®пјҢд»ҘдҫҝеңЁжү§иЎҢиҝҮзЁӢдёӯз”ұзҠ¶жҖҒеҮҪж•°дҪҝз”ЁгҖӮдәӢ件数жҚ®жҳҜдёҖдёӘconstжҲ–иҖ…дёҚжҳҜ-const жҢҮеҗ‘д»»дҪ•еҶ…зҪ®жҲ–з”ЁжҲ·е®ҡд№үзҡ„ж•°жҚ®зұ»еһӢзҡ„жҢҮй’ҲгҖӮ
дёҖж—ҰзҠ¶жҖҒе®ҢжҲҗжү§иЎҢпјҢдәӢ件数жҚ®е°ұиў«и®Өдёәз”Ёе®ҢдәҶпјҢеҝ…йЎ»еҲ йҷӨгҖӮеӣ жӯӨпјҢеҸ‘йҖҒеҲ°зҠ¶жҖҒжңәзҡ„д»»дҪ•дәӢ件数жҚ®йғҪеҝ…йЎ»йҖҡиҝҮSM_XAlloc()гҖӮзҠ¶жҖҒжңәеј•ж“ҺиҮӘеҠЁйҮҠж”ҫеҲҶй…Қзҡ„дәӢ件数жҚ®гҖӮSM_XFree().
еҪ“з”ҹжҲҗеӨ–йғЁдәӢ件时пјҢжү§иЎҢжҹҘжүҫд»ҘзЎ®е®ҡзҠ¶жҖҒиҪ¬жҚўж“ҚдҪңиҝҮзЁӢгҖӮдәӢ件жңүдёүз§ҚеҸҜиғҪзҡ„з»“жһңпјҡж–°зҠ¶жҖҒгҖҒеҝҪз•ҘдәӢ件жҲ–дёҚиғҪеҸ‘з”ҹгҖӮж–°зҠ¶жҖҒдјҡеҜјиҮҙиҪ¬жҚўеҲ°е…Ғи®ёжү§иЎҢзҡ„ж–°зҠ¶жҖҒгҖӮиҪ¬жҚўеҲ°зҺ°жңүзҠ¶жҖҒд№ҹжҳҜеҸҜиғҪзҡ„пјҢиҝҷж„Ҹе‘ізқҖеҪ“еүҚзҠ¶жҖҒиў«йҮҚж–°жү§иЎҢгҖӮеҜ№дәҺиў«еҝҪз•Ҙзҡ„дәӢ件пјҢдёҚжү§иЎҢд»»дҪ•зҠ¶жҖҒгҖӮдҪҶжҳҜпјҢдәӢ件数жҚ®(еҰӮжһңжңүзҡ„иҜқ)е°Ҷиў«еҲ йҷӨгҖӮжңҖеҗҺдёҖз§ҚдёҚеҸҜиғҪеҸ‘з”ҹзҡ„еҸҜиғҪжҖ§жҳҜдҝқз•ҷеңЁдәӢ件еңЁзҠ¶жҖҒжңәзҡ„еҪ“еүҚзҠ¶жҖҒдёӢж— ж•Ҳзҡ„жғ…еҶөдёӢдҪҝз”Ёзҡ„гҖӮеҰӮжһңеҸ‘з”ҹиҝҷз§Қжғ…еҶөпјҢиҪҜ件е°ұдјҡеҮәзҺ°ж•…йҡңгҖӮ
еңЁжӯӨе®һзҺ°дёӯпјҢжү§иЎҢйӘҢиҜҒиҪ¬жҚўжҹҘжүҫдёҚйңҖиҰҒеҶ…йғЁдәӢ件гҖӮеҒҮи®ҫзҠ¶жҖҒиҪ¬жҚўжҳҜжңүж•Ҳзҡ„гҖӮжӮЁеҸҜд»ҘжЈҖжҹҘжңүж•Ҳзҡ„еҶ…йғЁе’ҢеӨ–йғЁдәӢ件иҪ¬жҚўпјҢдҪҶе®һйҷ…дёҠпјҢиҝҷеҸӘдјҡеҚ з”ЁжӣҙеӨҡзҡ„еӯҳеӮЁз©әй—ҙпјҢ并且еҸӘдјҡдә§з”ҹеҫҲе°‘зҡ„еҘҪеӨ„гҖӮйӘҢиҜҒиҪ¬жҚўзҡ„зңҹжӯЈйңҖиҰҒеңЁдәҺејӮжӯҘзҡ„еӨ–йғЁдәӢ件пјҢеңЁиҝҷдәӣдәӢ件дёӯпјҢе®ўжҲ·з«ҜеҸҜиғҪеҜјиҮҙдәӢ件еңЁдёҚйҖӮеҪ“зҡ„ж—¶й—ҙеҸ‘з”ҹгҖӮдёҖж—ҰзҠ¶жҖҒжңәжү§иЎҢпјҢе®ғе°ұдёҚиғҪиў«дёӯж–ӯгҖӮе®ғеӨ„дәҺз§Ғжңүе®һзҺ°зҡ„жҺ§еҲ¶д№ӢдёӢпјҢеӣ жӯӨжІЎжңүеҝ…иҰҒиҝӣиЎҢиҪ¬жҚўжЈҖжҹҘгҖӮиҝҷдҪҝи®ҫи®Ўдәәе‘ҳеҸҜд»ҘиҮӘз”ұең°йҖҡиҝҮеҶ…йғЁдәӢ件жӣҙж”№зҠ¶жҖҒпјҢиҖҢж— йңҖжӣҙж–°иҪ¬жҚўиЎЁгҖӮ
зҠ¶жҖҒжңәжәҗд»Јз ҒеҢ…еҗ«еңЁ_StateMachine.c_е’Ң_StateMachine.h_жЎЈжЎҲгҖӮдёӢйқўзҡ„д»Јз ҒжҳҫзӨәдәҶйғЁеҲҶж ҮйўҳгҖӮиҝҷдёӘStateMachine жҠҘеӨҙеҢ…еҗ«еҗ„з§Қйў„еӨ„зҗҶеҷЁеӨҡиЎҢе®ҸпјҢд»Ҙз®ҖеҢ–зҠ¶жҖҒжңәзҡ„е®һзҺ°гҖӮ
enum { EVENT_IGNORED = 0xFE, CANNOT_HAPPEN = 0xFF }; typedef void NoEventData; // State machine constant data typedef struct { const CHAR* name; const BYTE maxStates; const struct SM_StateStruct* stateMap; const struct SM_StateStructEx* stateMapEx; } SM_StateMachineConst; // State machine instance data typedef struct { const CHAR* name; void* pInstance; BYTE newState; BYTE currentState; BOOL eventGenerated; void* pEventData; } SM_StateMachine; // Generic state function signatures typedef void (*SM_StateFunc)(SM_StateMachine* self, void* pEventData); typedef BOOL (*SM_GuardFunc)(SM_StateMachine* self, void* pEventData); typedef void (*SM_EntryFunc)(SM_StateMachine* self, void* pEventData); typedef void (*SM_ExitFunc)(SM_StateMachine* self); typedef struct SM_StateStruct { SM_StateFunc pStateFunc; } SM_StateStruct; typedef struct SM_StateStructEx { SM_StateFunc pStateFunc; SM_GuardFunc pGuardFunc; SM_EntryFunc pEntryFunc; SM_ExitFunc pExitFunc; } SM_StateStructEx; // Public functions #define SM_Event(_smName_, _eventFunc_, _eventData_) _eventFunc_(&_smName_##Obj, _eventData_) // Protected functions #define SM_InternalEvent(_newState_, _eventData_) _SM_InternalEvent(self, _newState_, _eventData_) #define SM_GetInstance(_instance_) (_instance_*)(self->pInstance); // Private functions void _SM_ExternalEvent(SM_StateMachine* self, const SM_StateMachineConst* selfConst, BYTE newState, void* pEventData); void _SM_InternalEvent(SM_StateMachine* self, BYTE newState, void* pEventData); void _SM_StateEngine(SM_StateMachine* self, const SM_StateMachineConst* selfConst); void _SM_StateEngineEx(SM_StateMachine* self, const SM_StateMachineConst* selfConst); #define SM_DECLARE(_smName_) extern SM_StateMachine _smName_##Obj; #define SM_DEFINE(_smName_, _instance_) SM_StateMachine _smName_##Obj = { #_smName_, _instance_, 0, 0, 0, 0 }; #define EVENT_DECLARE(_eventFunc_, _eventData_) void _eventFunc_(SM_StateMachine* self, _eventData_* pEventData); #define EVENT_DEFINE(_eventFunc_, _eventData_) void _eventFunc_(SM_StateMachine* self, _eventData_* pEventData) #define STATE_DECLARE(_stateFunc_, _eventData_) static void ST_##_stateFunc_(SM_StateMachine* self, _eventData_* pEventData); #define STATE_DEFINE(_stateFunc_, _eventData_) static void ST_##_stateFunc_(SM_StateMachine* self, _eventData_* pEventData)иҝҷдёӘSM_Event()е®Ҹз”ЁдәҺз”ҹжҲҗеӨ–йғЁдәӢ件пјҢиҖҢSM_InternalEvent()еңЁжү§иЎҢзҠ¶жҖҒеҮҪж•°жңҹй—ҙз”ҹжҲҗеҶ…йғЁдәӢ件гҖӮSM_GetInstance()иҺ·еҸ–жҢҮеҗ‘еҪ“еүҚзҠ¶жҖҒжңәеҜ№иұЎзҡ„жҢҮй’ҲгҖӮ
SM_DECLARE е’ҢSM_DEFINEз”ЁдәҺеҲӣе»әзҠ¶жҖҒжңәе®һдҫӢгҖӮEVENT_DECLAREе’ҢEVENT_DEFINEеҲӣе»әеӨ–йғЁдәӢ件еҮҪж•°гҖӮжңҖеҗҺпјҢSTATE_DECLAREе’ҢSTATE_DEFINEеҲӣе»әзҠ¶жҖҒеҮҪж•°гҖӮ
Motor е®һзҺ°жҲ‘们еҒҮи®ҫзҡ„з”өжңәжҺ§еҲ¶зҠ¶жҖҒжңәпјҢе…¶дёӯе®ўжҲ·з«ҜеҸҜд»ҘеҗҜеҠЁз”өжңәпјҢд»Ҙзү№е®ҡзҡ„йҖҹеәҰпјҢ并еҒңжӯўз”өжңәгҖӮиҝҷдёӘMotorж ҮйўҳжҺҘеҸЈеҰӮдёӢжүҖзӨәпјҡ
#include "StateMachine.h" // Motor object structure typedef struct { INT currentSpeed; } Motor; // Event data structure typedef struct { INT speed; } MotorData; // State machine event functions EVENT_DECLARE(MTR_SetSpeed, MotorData) EVENT_DECLARE(MTR_Halt, NoEventData)иҝҷдёӘMotorжәҗж–Ү件дҪҝз”Ёе®ҸйҖҡиҝҮйҡҗи—ҸжүҖйңҖзҡ„зҠ¶жҖҒжңәжңәеҷЁжқҘз®ҖеҢ–дҪҝз”ЁгҖӮ
// State enumeration order must match the order of state // method entries in the state map enum States { ST_IDLE, ST_STOP, ST_START, ST_CHANGE_SPEED, ST_MAX_STATES }; // State machine state functions STATE_DECLARE(Idle, NoEventData) STATE_DECLARE(Stop, NoEventData) STATE_DECLARE(Start, MotorData) STATE_DECLARE(ChangeSpeed, MotorData) // State map to define state function order BEGIN_STATE_MAP(Motor) STATE_MAP_ENTRY(ST_Idle) STATE_MAP_ENTRY(ST_Stop) STATE_MAP_ENTRY(ST_Start) STATE_MAP_ENTRY(ST_ChangeSpeed) END_STATE_MAP(Motor) // Set motor speed external event EVENT_DEFINE(MTR_SetSpeed, MotorData) { // Given the SetSpeed event, transition to a new state based upon // the current state of the state machine BEGIN_TRANSITION_MAP // - Current State - TRANSITION_MAP_ENTRY(ST_START) // ST_Idle TRANSITION_MAP_ENTRY(CANNOT_HAPPEN) // ST_Stop TRANSITION_MAP_ENTRY(ST_CHANGE_SPEED) // ST_Start TRANSITION_MAP_ENTRY(ST_CHANGE_SPEED) // ST_ChangeSpeed END_TRANSITION_MAP(Motor, pEventData) } // Halt motor external event EVENT_DEFINE(MTR_Halt, NoEventData) { // Given the Halt event, transition to a new state based upon // the current state of the state machine BEGIN_TRANSITION_MAP // - Current State - TRANSITION_MAP_ENTRY(EVENT_IGNORED) // ST_Idle TRANSITION_MAP_ENTRY(CANNOT_HAPPEN) // ST_Stop TRANSITION_MAP_ENTRY(ST_STOP) // ST_Start TRANSITION_MAP_ENTRY(ST_STOP) // ST_ChangeSpeed END_TRANSITION_MAP(Motor, pEventData) }MTR_SetSpeed е’ҢMTR_Haltзұ»дёӯзҡ„еӨ–йғЁдәӢ件гҖӮMotorзҠ¶жҖҒжңәгҖӮMTR_SetSpeed иҺ·еҸ–жҢҮеҗ‘MotorDataдәӢ件数жҚ®пјҢеҢ…еҗ«з”өжңәйҖҹеәҰгҖӮжӯӨж•°жҚ®з»“жһ„е°ҶдҪҝз”ЁSM_XFree()еңЁзҠ¶жҖҒеӨ„зҗҶе®ҢжҲҗеҗҺпјҢеҝ…йЎ»дҪҝз”ЁSM_XAlloc()еҮҪж•°и°ғз”Ёд№ӢеүҚгҖӮ
жҜҸдёӘзҠ¶жҖҒеҮҪж•°йғҪеҝ…йЎ»жңүдёҖдёӘдёҺе…¶е…іиҒ”зҡ„жһҡдёҫгҖӮиҝҷдәӣжһҡдёҫз”ЁдәҺеӯҳеӮЁзҠ¶жҖҒжңәзҡ„еҪ“еүҚзҠ¶жҖҒгҖӮеңЁ……йҮҢйқўMotor, StatesжҸҗдҫӣиҝҷдәӣжһҡдёҫпјҢиҝҷдәӣжһҡдёҫзЁҚеҗҺз”ЁдәҺеҜ№иҪ¬жҚўжҳ е°„е’ҢзҠ¶жҖҒжҳ е°„жҹҘжүҫиЎЁиҝӣиЎҢзҙўеј•гҖӮ
зҠ¶жҖҒеҮҪж•°е®һзҺ°жҜҸдёӘзҠ¶жҖҒ--жҜҸдёӘзҠ¶жҖҒжңәзҠ¶жҖҒдёҖдёӘзҠ¶жҖҒеҮҪж•°гҖӮSTATE_DECLARE з”ЁдәҺеЈ°жҳҺзҠ¶жҖҒеҮҪж•°жҺҘеҸЈе’ҢSTATE_DEFINE е®ҡд№үе®һзҺ°гҖӮ
// State machine sits here when motor is not running STATE_DEFINE(Idle, NoEventData) { printf("%s ST_Idlen", self->name); } // Stop the motor STATE_DEFINE(Stop, NoEventData) { // Get pointer to the instance data and update currentSpeed Motor* pInstance = SM_GetInstance(Motor); pInstance->currentSpeed = 0; // Perform the stop motor processing here printf("%s ST_Stop: %dn", self->name, pInstance->currentSpeed); // Transition to ST_Idle via an internal event SM_InternalEvent(ST_IDLE, NULL); } // Start the motor going STATE_DEFINE(Start, MotorData) { ASSERT_TRUE(pEventData); // Get pointer to the instance data and update currentSpeed Motor* pInstance = SM_GetInstance(Motor); pInstance->currentSpeed = pEventData->speed; // Set initial motor speed processing here printf("%s ST_Start: %dn", self->name, pInstance->currentSpeed); } // Changes the motor speed once the motor is moving STATE_DEFINE(ChangeSpeed, MotorData) { ASSERT_TRUE(pEventData); // Get pointer to the instance data and update currentSpeed Motor* pInstance = SM_GetInstance(Motor); pInstance->currentSpeed = pEventData->speed; // Perform the change motor speed here printf("%s ST_ChangeSpeed: %dn", self->name, pInstance->currentSpeed); }STATE_DECLAREе’ҢSTATE_DEFINEз”ЁдёӨдёӘеҸӮж•°гҖӮ第дёҖдёӘеҸӮж•°жҳҜзҠ¶жҖҒеҮҪж•°еҗҚгҖӮ第дәҢдёӘеҸӮж•°жҳҜдәӢ件数жҚ®зұ»еһӢгҖӮеҰӮжһңдёҚйңҖиҰҒдәӢ件数жҚ®пјҢиҜ·дҪҝз”ЁNoEventDataгҖӮе®Ҹд№ҹеҸҜз”ЁдәҺеҲӣе»әдҝқжҠӨгҖҒйҖҖеҮәе’Ңе…ҘеҸЈж“ҚдҪңпјҢжң¬ж–ҮзЁҚеҗҺе°ҶеҜ№иҝҷдәӣж“ҚдҪңиҝӣиЎҢи§ЈйҮҠгҖӮ
иҝҷдёӘSM_GetInstance()е®ҸиҺ·еҸ–зҠ¶жҖҒжңәеҜ№иұЎзҡ„е®һдҫӢгҖӮе®Ҹзҡ„еҸӮж•°жҳҜзҠ¶жҖҒжңәеҗҚгҖӮ
еңЁжӯӨе®һзҺ°дёӯпјҢжүҖжңүзҠ¶жҖҒжңәеҮҪж•°йғҪеҝ…йЎ»йҒөе®ҲиҝҷдәӣзӯҫеҗҚпјҢеҰӮдёӢжүҖзӨәпјҡ
// Generic state function signatures typedef void (*SM_StateFunc)(SM_StateMachine* self, void* pEventData); typedef BOOL (*SM_GuardFunc)(SM_StateMachine* self, void* pEventData); typedef void (*SM_EntryFunc)(SM_StateMachine* self, void* pEventData); typedef void (*SM_ExitFunc)(SM_StateMachine* self);
еҗ„SM_StateFunc жҺҘеҸ—жҢҮеҗ‘SM_StateMachineеҜ№иұЎе’ҢдәӢ件数жҚ®гҖӮеҰӮжһңNoEventData иў«дҪҝз”Ёж—¶пјҢpEventDataдәүи®әе°ҶжҳҜNULLгҖӮеҗҰеҲҷпјҢpEventDataеҸӮж•°зҡ„зұ»еһӢдёәSTATE_DEFINE.
еңЁ……йҮҢйқўMotorж°ҸStartзҠ¶жҖҒеҮҪж•°STATE_DEFINE(Start, MotorData) е®Ҹжү©еұ•еҲ°пјҡ
void ST_Start(SM_StateMachine* self, MotorData* pEventData)
жіЁж„ҸпјҢжҜҸдёӘзҠ¶жҖҒеҮҪж•°йғҪжңүself е’ҢpEventData дәүи®әгҖӮself жҳҜжҢҮеҗ‘зҠ¶жҖҒжңәеҜ№иұЎзҡ„жҢҮй’ҲпјҢ并且pEventData дәӢ件数жҚ®гҖӮиҝҳиҜ·жіЁж„ҸпјҢе®Ҹд»ҘвҖңST_вҖңз”ЁдәҺеҲӣе»әеҮҪж•°зҡ„зҠ¶жҖҒеҗҚз§°гҖӮST_Start().
зұ»дјјең°пјҢStop зҠ¶жҖҒеҮҪж•°STATE_DEFINE(Stop, NoEventData)ISжү©еұ•еҲ°пјҡ
void ST_Stop(SM_StateMachine* self, void* pEventData)
Stop дёҚжҺҘеҸ—дәӢ件数жҚ®пјҢеӣ жӯӨpEventData и®әзӮ№жҳҜvoid*.
жҜҸдёӘзҠ¶жҖҒ/дҝқжҠӨ/е…ҘеҸЈ/йҖҖеҮәеҮҪж•°еңЁе®ҸдёӯиҮӘеҠЁж·»еҠ дёүдёӘеӯ—з¬ҰгҖӮдҫӢеҰӮпјҢеҰӮжһңдҪҝз”ЁSTATE_DEFINE(Idle, NoEventData)е®һйҷ…зҡ„зҠ¶жҖҒеҮҪж•°еҗҚиў«и°ғз”ЁгҖӮST_Idle().
ST_-зҠ¶жҖҒеҮҪж•°еүҚзҪ®еӯ—з¬Ұ
GD_-дҝқжҠӨеҠҹиғҪеүҚзҪ®еӯ—з¬Ұ
EN_-е…ҘеҸЈеҮҪж•°еүҚйқўзҡ„еӯ—з¬Ұ
EX_-йҖҖеҮәеҮҪж•°еүҚзҪ®еӯ—з¬Ұ
SM_GuardFunc е’ҢSM_Entry еҠҹиғҪtypedefд№ҹжҺҘеҸ—дәӢ件数жҚ®гҖӮSM_ExitFunc жҳҜе”ҜдёҖзҡ„пјҢеӣ дёәдёҚе…Ғи®ёд»»дҪ•дәӢ件数жҚ®гҖӮ
зҠ¶жҖҒжңәеј•ж“ҺйҖҡиҝҮдҪҝз”ЁзҠ¶жҖҒжҳ е°„зҹҘйҒ“иҰҒи°ғз”Ёе“ӘдёӘзҠ¶жҖҒеҮҪж•°.зҠ¶жҖҒеӣҫжҳ е°„currentStateеҸҳйҮҸи®ҫзҪ®дёәзү№е®ҡзҡ„зҠ¶жҖҒеҮҪж•°гҖӮдҫӢеҰӮпјҢеҰӮжһңcurrentState жҳҜ2пјҢеҲҷи°ғ用第дёүдёӘзҠ¶жҖҒжҳ е°„еҮҪж•°жҢҮй’ҲйЎ№(д»Һйӣ¶и®Ўж•°)гҖӮзҠ¶жҖҒжҳ е°„иЎЁжҳҜдҪҝз”Ёд»ҘдёӢдёүдёӘе®ҸеҲӣе»әзҡ„пјҡ
BEGIN_STATE_MAP STATE_MAP_ENTRY END_STATE_MAP
BEGIN_STATE_MAP еҗҜеҠЁзҠ¶жҖҒжҳ е°„еәҸеҲ—гҖӮеҗ„STATE_MAP_ENTRY жңүдёҖдёӘзҠ¶жҖҒеҮҪж•°еҗҚз§°еҸӮж•°гҖӮEND_STATE_MAPз»Ҳжӯўең°еӣҫгҖӮеӣҪ家ең°еӣҫMotor еҰӮдёӢжүҖзӨәпјҡ
BEGIN_STATE_MAP(Motor) STATE_MAP_ENTRY(ST_Idle) STATE_MAP_ENTRY(ST_Stop) STATE_MAP_ENTRY(ST_Start) STATE_MAP_ENTRY(ST_ChangeSpeed) END_STATE_MAP
жҲ–иҖ…пјҢиӯҰеҚ«/е…ҘеҸЈ/еҮәеҸЈзү№жҖ§йңҖиҰҒеҲ©з”Ё_EX(жү©еұ•)е®Ҹзҡ„зүҲжң¬гҖӮ
BEGIN_STATE_MAP_EX STATE_MAP_ENTRY_EX or STATE_MAP_ENTRY_ALL_EX END_STATE_MAP_EX
иҝҷдёӘSTATE_MAP_ENTRY_ALL_EX е®ҸжҢүз…§иҜҘйЎәеәҸдёәзҠ¶жҖҒж“ҚдҪңгҖҒдҝқжҠӨжқЎд»¶гҖҒе…ҘеҸЈж“ҚдҪңе’ҢйҖҖеҮәж“ҚдҪңи®ҫзҪ®дәҶеӣӣдёӘеҸӮж•°гҖӮзҠ¶жҖҒж“ҚдҪңжҳҜејәеҲ¶жҖ§зҡ„пјҢдҪҶе…¶д»–ж“ҚдҪңжҳҜеҸҜйҖүзҡ„гҖӮеҰӮжһңзҠ¶жҖҒжІЎжңүеҠЁдҪңпјҢеҲҷдҪҝз”Ё0дёәдәҶдәүи®әгҖӮеҰӮжһңзҠ¶жҖҒжІЎжңүд»»дҪ•дҝқжҠӨ/иҝӣе…Ҙ/йҖҖеҮәйҖүйЎ№пјҢеҲҷSTATE_MAP_ENTRY_EX е®Ҹе°ҶжүҖжңүжңӘдҪҝз”Ёзҡ„йҖүйЎ№й»ҳи®Өдёә0гҖӮдёӢйқўзҡ„е®ҸзүҮж®өжҳҜжң¬ж–ҮеҗҺйқўд»Ӣз»Қзҡ„дёҖдёӘй«ҳзә§зӨәдҫӢгҖӮ
// State map to define state function order BEGIN_STATE_MAP_EX(CentrifugeTest) STATE_MAP_ENTRY_ALL_EX(ST_Idle, 0, EN_Idle, 0) STATE_MAP_ENTRY_EX(ST_Completed) STATE_MAP_ENTRY_EX(ST_Failed) STATE_MAP_ENTRY_ALL_EX(ST_StartTest, GD_StartTest, 0, 0) STATE_MAP_ENTRY_EX(ST_Acceleration) STATE_MAP_ENTRY_ALL_EX(ST_WaitForAcceleration, 0, 0, EX_WaitForAcceleration) STATE_MAP_ENTRY_EX(ST_Deceleration) STATE_MAP_ENTRY_ALL_EX(ST_WaitForDeceleration, 0, 0, EX_WaitForDeceleration) END_STATE_MAP_EX(CentrifugeTest)
дёҚиҰҒеҝҳи®°ж·»еҠ еүҚйқўзҡ„еӯ—з¬Ұ(ST_, GD_, EN_жҲ–EX_)жҜҸйЎ№еҠҹиғҪгҖӮ
еңЁC++дёӯпјҢеҜ№иұЎжҳҜиҜӯиЁҖзҡ„з»„жҲҗйғЁеҲҶгҖӮдҪҝз”ЁCпјҢжӮЁеҝ…йЎ»жӣҙеҠ еҠӘеҠӣең°е®ҢжҲҗзұ»дјјзҡ„иЎҢдёәгҖӮжӯӨCиҜӯиЁҖзҠ¶жҖҒжңәж”ҜжҢҒеӨҡдёӘзҠ¶жҖҒжңәеҜ№иұЎ(жҲ–еӨҡдёӘе®һдҫӢ)пјҢиҖҢдёҚжҳҜе…·жңүеҚ•дёӘйқҷжҖҒзҠ¶жҖҒжңәе®һзҺ°гҖӮ
иҝҷдёӘSM_StateMachine ж•°жҚ®з»“жһ„еӯҳеӮЁзҠ¶жҖҒжңәе®һдҫӢж•°жҚ®пјӣжҜҸдёӘзҠ¶жҖҒжңәе®һдҫӢеӯҳеӮЁдёҖдёӘеҜ№иұЎгҖӮиҝҷдёӘSM_StateMachineConst ж•°жҚ®з»“жһ„еӯҳеӮЁеёёйҮҸж•°жҚ®пјӣжҜҸдёӘзҠ¶жҖҒжңәзұ»еһӢйғҪжңүдёҖдёӘеёёйҮҸеҜ№иұЎгҖӮ
зҠ¶жҖҒжңәдҪҝз”ЁSM_DEFINE е®ҸгҖӮ第дёҖдёӘеҸӮж•°жҳҜзҠ¶жҖҒжңәеҗҚз§°гҖӮ第дәҢдёӘеҸӮж•°жҳҜжҢҮеҗ‘з”ЁжҲ·е®ҡд№үзҡ„зҠ¶жҖҒжңәз»“жһ„зҡ„жҢҮй’ҲпјҢжҲ–NULL еҰӮжһңжІЎжңүз”ЁжҲ·еҜ№иұЎгҖӮ
#define SM_DEFINE(_smName_, _instance_) SM_StateMachine _smName_##Obj = { #_smName_, _instance_, 0, 0, 0, 0 };еңЁжң¬дҫӢдёӯпјҢзҠ¶жҖҒжңәеҗҚз§°дёәMotorеҲӣе»әдәҶдёӨдёӘеҜ№иұЎе’ҢдёӨдёӘзҠ¶жҖҒжңәгҖӮ
// Define motor objects static Motor motorObj1; static Motor motorObj2; // Define two public Motor state machine instances SM_DEFINE(Motor1SM, &motorObj1) SM_DEFINE(Motor2SM, &motorObj2)
жҜҸдёӘ马иҫҫеҜ№иұЎзӢ¬з«Ӣең°еӨ„зҗҶзҠ¶жҖҒжү§иЎҢгҖӮиҝҷдёӘMotor з»“жһ„з”ЁдәҺеӯҳеӮЁзҠ¶жҖҒжңәзү№е®ҡдәҺе®һдҫӢзҡ„ж•°жҚ®гҖӮеңЁзҠ¶жҖҒеҮҪж•°дёӯпјҢдҪҝз”ЁSM_GetInstance()иҺ·еҸ–жҢҮеҗ‘Motor еҜ№иұЎеңЁиҝҗиЎҢж—¶еҲқе§ӢеҢ–гҖӮ
// Get pointer to the instance data and update currentSpeed Motor* pInstance = SM_GetInstance(Motor); pInstance->currentSpeed = pEventData->speed;
иҰҒжіЁж„Ҹзҡ„жңҖеҗҺдёҖдёӘз»ҶиҠӮжҳҜзҠ¶жҖҒиҪ¬жҚўи§„еҲҷгҖӮзҠ¶жҖҒжңәеҰӮдҪ•зҹҘйҒ“еә”иҜҘеҸ‘з”ҹд»Җд№ҲиҪ¬жҚўпјҹзӯ”жЎҲжҳҜиҝҮжёЎеӣҫгҖӮиҪ¬жҚўжҳ е°„жҳҜжҳ е°„currentState еҸҳйҮҸдёәзҠ¶жҖҒжһҡдёҫеёёйҮҸгҖӮжҜҸдёӘеӨ–йғЁдәӢ件еҮҪж•°йғҪжңүдёҖдёӘз”ЁдёүдёӘе®ҸеҲӣе»әзҡ„иҪ¬жҚўжҳ е°„иЎЁпјҡ
BEGIN_TRANSITION_MAP TRANSITION_MAP_ENTRY END_TRANSITION_MAP
иҝҷдёӘMTR_Halt дәӢ件еҮҪж•°Motor е°ҶиҪ¬жҚўжҳ е°„е®ҡд№үдёәпјҡ
// Halt motor external event EVENT_DEFINE(MTR_Halt, NoEventData) { // Given the Halt event, transition to a new state based upon // the current state of the state machine BEGIN_TRANSITION_MAP // - Current State - TRANSITION_MAP_ENTRY(EVENT_IGNORED) // ST_Idle TRANSITION_MAP_ENTRY(CANNOT_HAPPEN) // ST_Stop TRANSITION_MAP_ENTRY(ST_STOP) // ST_Start TRANSITION_MAP_ENTRY(ST_STOP) // ST_ChangeSpeed END_TRANSITION_MAP(Motor, pEventData) }BEGIN_TRANSITION_MAPејҖе§Ӣең°еӣҫгҖӮеҗ„TRANSITION_MAP_ENTRYе®ғжҢҮзӨәзҠ¶жҖҒжңәж №жҚ®еҪ“еүҚзҠ¶жҖҒеә”иҜҘеҒҡд»Җд№ҲгҖӮжҜҸдёӘиҪ¬жҚўжҳ е°„иЎЁдёӯзҡ„жқЎзӣ®ж•°еҝ…йЎ»дёҺзҠ¶жҖҒеҮҪж•°зҡ„ж•°зӣ®е®Ңе…ЁеҢ№й…ҚгҖӮеңЁжҲ‘们зҡ„дҫӢеӯҗдёӯпјҢжҲ‘们жңүеӣӣдёӘзҠ¶жҖҒеҮҪж•°пјҢжүҖд»ҘжҲ‘们йңҖиҰҒеӣӣдёӘиҪ¬жҚўжҳ е°„жқЎзӣ®гҖӮжҜҸдёӘжқЎзӣ®зҡ„дҪҚзҪ®дёҺе·һжҳ е°„дёӯе®ҡд№үзҡ„зҠ¶жҖҒеҮҪж•°зҡ„йЎәеәҸзӣёеҢ№й…ҚгҖӮеӣ жӯӨпјҢ第дёҖдёӘжқЎзӣ®еңЁMTR_HaltеҮҪж•°иЎЁзӨәEVENT_IGNORED еҰӮдёӢжүҖзӨәпјҡ
TRANSITION_MAP_ENTRY (EVENT_IGNORED) // ST_Idle
иҝҷиў«и§ЈйҮҠдёәвҖңеҰӮжһңеңЁеҪ“еүҚзҠ¶жҖҒдёәзҠ¶жҖҒз©әй—Іж—¶еҸ‘з”ҹдәҶжҡӮеҒңдәӢ件пјҢеҸӘйңҖеҝҪз•ҘиҜҘдәӢ件вҖқгҖӮ
еҗҢж ·пјҢең°еӣҫдёҠзҡ„第дёүдёӘжқЎзӣ®жҳҜпјҡ
TRANSITION_MAP_ENTRY (ST_STOP) // ST_Start
иҝҷиЎЁзӨәвҖңеҰӮжһңеңЁеҪ“еүҚдёәзҠ¶жҖҒеҗҜеҠЁж—¶еҸ‘з”ҹдәҶжҡӮеҒңдәӢ件пјҢеҲҷиҪ¬жҚўдёәзҠ¶жҖҒеҒңжӯўвҖқгҖӮ
END_TRANSITION_MAP з»Ҳжӯўең°еӣҫгҖӮжӯӨе®Ҹзҡ„第дёҖдёӘеҸӮж•°жҳҜзҠ¶жҖҒжңәеҗҚз§°гҖӮ第дәҢдёӘеҸӮж•°жҳҜдәӢ件数жҚ®гҖӮ
иҝҷдёӘC_ASSERT()е®ҸеңЁEND_TRANSITION_MAPгҖӮеҰӮжһңзҠ¶жҖҒжңәзҠ¶жҖҒж•°дёҺиҪ¬жҚўжҳ е°„йЎ№зҡ„ж•°зӣ®дёҚеҢ№й…ҚпјҢеҲҷз”ҹжҲҗзј–иҜ‘ж—¶й”ҷиҜҜгҖӮ
еҲӣе»әдёҖдёӘж–°зҡ„зҠ¶жҖҒжңәйңҖиҰҒдёҖдәӣеҹәжң¬зҡ„й«ҳзә§жӯҘйӘӨпјҡ
еҲӣе»әдёҖдёӘStates жҜҸдёӘзҠ¶жҖҒеҮҪж•°жңүдёҖдёӘжқЎзӣ®зҡ„жһҡдёҫ
е®ҡд№үзҠ¶жҖҒеҮҪж•°
е®ҡд№үдәӢ件еҮҪж•°
еҲӣе»әдёҖдёӘзҠ¶жҖҒжҳ е°„жҹҘжүҫиЎЁгҖӮSTATE_MAPе®Ҹ
дёәжҜҸдёӘеӨ–йғЁдәӢ件еҮҪж•°еҲӣе»әдёҖдёӘиҪ¬жҚўжҳ е°„жҹҘжүҫиЎЁгҖӮTRANSITION_MAP е®Ҹ
зҠ¶жҖҒеј•ж“ҺеҹәдәҺз”ҹжҲҗзҡ„дәӢ件жү§иЎҢзҠ¶жҖҒеҮҪж•°гҖӮиҪ¬жҚўжҳ е°„жҳҜSM_StateStructзұ»зҙўеј•зҡ„е®һдҫӢгҖӮcurrentState еҸҳйҮҸгҖӮеҪ“_SM_StateEngine()еҮҪж•°дёӯжҹҘжүҫжӯЈзЎ®зҡ„зҠ¶жҖҒеҮҪж•°гҖӮSM_StateStructйҳөеҲ—гҖӮеңЁзҠ¶жҖҒеҮҪж•°жңүжңәдјҡжү§иЎҢд№ӢеҗҺпјҢе®ғдјҡйҮҠж”ҫдәӢ件数жҚ®(еҰӮжһңжңүзҡ„иҜқ)пјҢ然еҗҺеҶҚжЈҖжҹҘжҳҜеҗҰжңүд»»дҪ•еҶ…йғЁдәӢ件жҳҜйҖҡиҝҮSM_InternalEvent().
// The state engine executes the state machine states void _SM_StateEngine(SM_StateMachine* self, SM_StateMachineConst* selfConst) { void* pDataTemp = NULL; ASSERT_TRUE(self); ASSERT_TRUE(selfConst); // While events are being generated keep executing states while (self->eventGenerated) { // Error check that the new state is valid before proceeding ASSERT_TRUE(self->newState < selfConst->maxStates); // Get the pointers from the state map SM_StateFunc state = selfConst->stateMap[self->newState].pStateFunc; // Copy of event data pointer pDataTemp = self->pEventData; // Event data used up, reset the pointer self->pEventData = NULL; // Event used up, reset the flag self->eventGenerated = FALSE; // Switch to the new current state self->currentState = self->newState; // Execute the state action passing in event data ASSERT_TRUE(state != NULL); state(self, pDataTemp); // If event data was used, then delete it if (pDataTemp) { SM_XFree(pDataTemp); pDataTemp = NULL; } } }з”ЁдәҺдҝқжҠӨгҖҒе…ҘеҸЈгҖҒзҠ¶жҖҒе’ҢйҖҖеҮәж“ҚдҪңзҡ„зҠ¶жҖҒеј•ж“ҺйҖ»иҫ‘з”ұд»ҘдёӢйЎәеәҸиЎЁзӨәгҖӮиҝҷдёӘ_SM_StateEngine()еј•ж“ҺеҸӘе®һзҺ°дёӢйқўзҡ„#1е’Ң#5гҖӮжү©еұ•_SM_StateEngineEx()еј•ж“ҺдҪҝз”Ёж•ҙдёӘйҖ»иҫ‘еәҸеҲ—гҖӮ
иҜ„дј°зҠ¶жҖҒиҪ¬жҚўиЎЁгҖӮеҰӮжһңEVENT_IGNOREDпјҢеҲҷеҝҪз•ҘдәӢ件иҖҢдёҚжү§иЎҢиҪ¬жҚўгҖӮеҰӮжһңCANNOT_HAPPENиҪҜ件故йҡңгҖӮеҗҰеҲҷпјҢ继з»ӯдёӢдёҖжӯҘгҖӮеҰӮжһңе®ҡд№үдәҶдҝқжҠӨжқЎд»¶пјҢеҲҷжү§иЎҢдҝқжҠӨжқЎд»¶еҮҪж•°гҖӮеҰӮжһңдҝқжҠӨжқЎд»¶иҝ”еӣһFALSEпјҢеҲҷеҝҪз•ҘзҠ¶жҖҒиҪ¬жҚўиҖҢдёҚи°ғз”ЁзҠ¶жҖҒеҮҪж•°гҖӮеҰӮжһңеҚ«е…өеӣһжқҘTRUEпјҢжҲ–иҖ…еҰӮжһңдёҚеӯҳеңЁдҝқжҠӨжқЎд»¶пјҢеҲҷжү§иЎҢзҠ¶жҖҒеҮҪж•°гҖӮеҰӮжһңдёәеҪ“еүҚзҠ¶жҖҒе®ҡд№үдәҶиҪ¬жҚўеҲ°ж–°зҠ¶жҖҒ并е®ҡд№үдәҶйҖҖеҮәж“ҚдҪңпјҢеҲҷи°ғз”ЁеҪ“еүҚзҠ¶жҖҒйҖҖеҮәж“ҚдҪңеҮҪж•°гҖӮеҰӮжһңдёәж–°зҠ¶жҖҒе®ҡд№үдәҶиҪ¬жҚўеҲ°ж–°зҠ¶жҖҒ并е®ҡд№үдәҶжқЎзӣ®ж“ҚдҪңпјҢеҲҷи°ғз”Ёж–°зҡ„зҠ¶жҖҒжқЎзӣ®ж“ҚдҪңеҮҪж•°гҖӮи°ғз”Ёж–°зҠ¶жҖҒзҡ„зҠ¶жҖҒеҠЁдҪңеҮҪж•°гҖӮж–°зҡ„зҠ¶жҖҒзҺ°еңЁжҳҜеҪ“еүҚзҡ„зҠ¶жҖҒгҖӮ
жӯӨж—¶пјҢжҲ‘们жңүдёҖдёӘе·ҘдҪңзҠ¶жҖҒжңәгҖӮи®©жҲ‘们зңӢзңӢеҰӮдҪ•дёәе®ғз”ҹжҲҗдәӢ件гҖӮйҖҡиҝҮеҠЁжҖҒеҲӣе»әдәӢ件数жҚ®з»“жһ„з”ҹжҲҗеӨ–йғЁдәӢ件гҖӮSM_XAlloc()пјҢеҲҶй…Қз»“жһ„жҲҗе‘ҳеҸҳйҮҸпјҢ并дҪҝз”ЁSM_Event()е®ҸгҖӮдёӢйқўзҡ„д»Јз ҒзүҮж®өжҳҫзӨәдәҶеҰӮдҪ•иҝӣиЎҢеҗҢжӯҘи°ғз”ЁгҖӮ
MotorData* data; // Create event data data = SM_XAlloc(sizeof(MotorData)); data->speed = 100; // Call MTR_SetSpeed event function to start motor SM_Event(Motor1SM, MTR_SetSpeed, data);
иҝҷдёӘSM_Event()第дёҖдёӘеҸӮж•°жҳҜзҠ¶жҖҒжңәеҗҚз§°гҖӮ第дәҢдёӘеҸӮж•°жҳҜиҰҒи°ғз”Ёзҡ„дәӢ件еҮҪж•°гҖӮ第дёүдёӘеҸӮж•°жҳҜдәӢ件数жҚ®пјҢжҲ–иҖ…NULL еҰӮжһңжІЎжңүж•°жҚ®гҖӮ
иӢҘиҰҒд»ҺзҠ¶жҖҒеҮҪж•°еҶ…з”ҹжҲҗеҶ…йғЁдәӢ件пјҢиҜ·и°ғз”ЁSM_InternalEvent()гҖӮеҰӮжһңзӣ®ж ҮдёҚжҺҘеҸ—дәӢ件数жҚ®пјҢйӮЈд№ҲжңҖеҗҺдёҖдёӘеҸӮж•°жҳҜNULLгҖӮеҗҰеҲҷпјҢдҪҝз”ЁSM_XAlloc().
SM_InternalEvent(ST_IDLE, NULL);
еңЁдёҠйқўзҡ„зӨәдҫӢдёӯпјҢзҠ¶жҖҒеҮҪж•°е®ҢжҲҗжү§иЎҢеҗҺпјҢзҠ¶жҖҒжңәе°ҶиҪ¬жҚўдёәST_IdleзҠ¶жҖҒгҖӮеҸҰдёҖж–№йқўпјҢеҰӮжһңйңҖиҰҒе°ҶдәӢ件数жҚ®еҸ‘йҖҒеҲ°зӣ®ж ҮзҠ¶жҖҒпјҢеҲҷйңҖиҰҒеңЁе ҶдёҠеҲӣе»әж•°жҚ®з»“жһ„并дҪңдёәеҸӮж•°дј е…ҘгҖӮ
MotorData* data; data = SM_XAlloc(sizeof(MotorData)); data->speed = 100; SM_InternalEvent(ST_CHANGE_SPEED, data);
еҝ…йЎ»еҠЁжҖҒеҲӣе»әжүҖжңүзҠ¶жҖҒжңәдәӢ件数жҚ®гҖӮ然иҖҢпјҢеңЁжҹҗдәӣзі»з»ҹдёҠпјҢдҪҝз”Ёе ҶжҳҜдёҚеҸҜеҸ–зҡ„гҖӮеҢ…жӢ¬x_allocatorжЁЎеқ—жҳҜдёҖдёӘеӣәе®ҡзҡ„еқ—еҶ…еӯҳеҲҶй…ҚзЁӢеәҸпјҢе®ғж¶ҲйҷӨдәҶе Ҷзҡ„дҪҝз”ЁгҖӮе®ҡд№үUSE_SM_ALLOCATORеҶ…_StateMachine.c_иӢҘиҰҒдҪҝз”Ёеӣәе®ҡеқ—еҲҶй…ҚеҷЁпјҢиҜ·жү§иЎҢд»ҘдёӢж“ҚдҪңгҖӮи§ҒеҸӮиҖғж–ҮзҢ®дёӢйқўдёҖиҠӮx_allocatorдҝЎжҒҜгҖӮ
иҝҷдёӘCentrifugeTest зӨәдҫӢжј”зӨәеҰӮдҪ•дҪҝз”ЁдҝқжҠӨгҖҒе…ҘеҸЈе’ҢйҖҖеҮәж“ҚдҪңеҲӣе»әжү©еұ•зҠ¶жҖҒжңәгҖӮ
A CentrifgeTest еҜ№иұЎе’ҢзҠ¶жҖҒжңәиў«еҲӣе»әгҖӮиҝҷйҮҢе”ҜдёҖзҡ„еҢәеҲ«жҳҜзҠ¶жҖҒжңәжҳҜдёҖдёӘеҚ•дҫӢпјҢж„Ҹе‘ізқҖеҜ№иұЎжҳҜprivateеҸӘжңүдёҖдёӘдҫӢеӯҗCentrifugeTest еҸҜд»Ҙиў«еҲӣйҖ еҮәжқҘгҖӮиҝҷдёҺMotor е…Ғи®ёеӨҡдёӘе®һдҫӢзҡ„зҠ¶жҖҒжңәгҖӮ
// CentrifugeTest object structure typedef struct { INT speed; BOOL pollActive; } CentrifugeTest; // Define private instance of motor state machine CentrifugeTest centrifugeTestObj; SM_DEFINE(CentrifugeTestSM, ¢rifugeTestObj)жү©еұ•зҠ¶жҖҒжңәдҪҝз”ЁENTRY_DECLARE, GUARD_DECLAREе’ҢEXIT_DECLARE е®ҸгҖӮ
// State enumeration order must match the order of state // method entries in the state map enum States { ST_IDLE, ST_COMPLETED, ST_FAILED, ST_START_TEST, ST_ACCELERATION, ST_WAIT_FOR_ACCELERATION, ST_DECELERATION, ST_WAIT_FOR_DECELERATION, ST_MAX_STATES }; // State machine state functions STATE_DECLARE(Idle, NoEventData) ENTRY_DECLARE(Idle, NoEventData) STATE_DECLARE(Completed, NoEventData) STATE_DECLARE(Failed, NoEventData) STATE_DECLARE(StartTest, NoEventData) GUARD_DECLARE(StartTest, NoEventData) STATE_DECLARE(Acceleration, NoEventData) STATE_DECLARE(WaitForAcceleration, NoEventData) EXIT_DECLARE(WaitForAcceleration) STATE_DECLARE(Deceleration, NoEventData) STATE_DECLARE(WaitForDeceleration, NoEventData) EXIT_DECLARE(WaitForDeceleration) // State map to define state function order BEGIN_STATE_MAP_EX(CentrifugeTest) STATE_MAP_ENTRY_ALL_EX(ST_Idle, 0, EN_Idle, 0) STATE_MAP_ENTRY_EX(ST_Completed) STATE_MAP_ENTRY_EX(ST_Failed) STATE_MAP_ENTRY_ALL_EX(ST_StartTest, GD_StartTest, 0, 0) STATE_MAP_ENTRY_EX(ST_Acceleration) STATE_MAP_ENTRY_ALL_EX(ST_WaitForAcceleration, 0, 0, EX_WaitForAcceleration) STATE_MAP_ENTRY_EX(ST_Deceleration) STATE_MAP_ENTRY_ALL_EX(ST_WaitForDeceleration, 0, 0, EX_WaitForDeceleration) END_STATE_MAP_EX(CentrifugeTest)жіЁж„Ҹ_EXжү©еұ•зҠ¶жҖҒжҳ е°„е®ҸпјҢд»ҺиҖҢж”ҜжҢҒдҝқжҠӨ/иҝӣе…Ҙ/йҖҖеҮәеҠҹиғҪгҖӮжҜҸдёӘиӯҰеҚ«/еҮәе…ҘеҸЈDECLARE е®Ҹеҝ…йЎ»дёҺDEFINEгҖӮдҫӢеҰӮпјҢStartTest еӣҪ家иҒҢиғҪеЈ°жҳҺдёәпјҡ
GUARD_DECLARE(StartTest, NoEventData)
дҝқжҠӨжқЎд»¶еҮҪж•°иҝ”еӣһTRUE еҰӮжһңиҰҒжү§иЎҢзҠ¶жҖҒеҮҪж•°жҲ–FALSE дёҚ然зҡ„иҜқгҖӮ
// Guard condition to determine whether StartTest state is executed. GUARD_DEFINE(StartTest, NoEventData) { printf("%s GD_StartTestn", self->name); if (centrifugeTestObj.speed == 0) return TRUE; // Centrifuge stopped. OK to start test. else return FALSE; // Centrifuge spinning. Can't start test. }иӢҘиҰҒйҳІжӯўзҠ¶жҖҒжңәжӯЈеңЁжү§иЎҢиҝҮзЁӢдёӯз”ұеҸҰдёҖдёӘзәҝзЁӢжҠўеҚ пјҢиҜ·е°ҶStateMachine жЁЎеқ—еҸҜд»ҘеңЁ_SM_ExternalEvent()еҠҹиғҪгҖӮеңЁе…Ғи®ёжү§иЎҢеӨ–йғЁдәӢ件д№ӢеүҚпјҢеҸҜд»Ҙй”Ғе®ҡдҝЎеҸ·йҮҸгҖӮеңЁеӨ„зҗҶдәҶеӨ–йғЁдәӢ件е’ҢжүҖжңүеҶ…йғЁдәӢ件еҗҺпјҢйҮҠж”ҫдәҶиҪҜ件й”ҒпјҢе…Ғи®ёеҸҰдёҖдёӘеӨ–йғЁдәӢ件иҝӣе…ҘзҠ¶жҖҒжңәе®һдҫӢгҖӮ
жіЁйҮҠжҢҮеҮәпјҢеҰӮжһңеә”з”ЁзЁӢеәҸжҳҜеӨҡзәҝзЁӢзҡ„пјҢеҲҷеә”е°Ҷй”Ғе’Ңи§Јй”Ғж”ҫеңЁдҪ•еӨ„гҖӮ_е’Ң_еӨҡдёӘзәҝзЁӢиғҪеӨҹи®ҝй—®еҚ•дёӘзҠ¶жҖҒжңәе®һдҫӢгҖӮжіЁж„ҸжҜҸдёӘStateMachine еҜ№иұЎеә”иҜҘжңүиҮӘе·ұзҡ„иҪҜ件й”Ғе®һдҫӢгҖӮиҝҷе°ҶйҳІжӯўеҚ•дёӘе®һдҫӢй”Ғе®ҡ并йҳ»жӯўжүҖжңүе…¶д»–е®һдҫӢгҖӮStateMachineеҜ№иұЎжү§иЎҢгҖӮеҸӘжңүеңЁдёӢеҲ—жғ…еҶөдёӢжүҚйңҖиҰҒиҪҜ件й”ҒпјҡStateMachine е®һдҫӢз”ұеӨҡдёӘжҺ§еҲ¶зәҝзЁӢи°ғз”ЁгҖӮеҰӮжһңжІЎжңүпјҢеҲҷдёҚйңҖиҰҒй”ҒгҖӮ
дҪҝз”ЁжӯӨж–№жі•е®һзҺ°зҠ¶жҖҒжңәпјҢиҖҢдёҚжҳҜж—§ж–№жі•switchиҜӯеҸҘйЈҺж јдјјд№ҺжҳҜйўқеӨ–зҡ„еҠӘеҠӣгҖӮ然иҖҢпјҢеӣһжҠҘеңЁдәҺдёҖдёӘжӣҙеҒҘеЈ®зҡ„и®ҫи®ЎпјҢиғҪеӨҹеңЁж•ҙдёӘеӨҡзәҝзЁӢзі»з»ҹдёҠз»ҹдёҖдҪҝз”ЁгҖӮи®©жҜҸдёҖз§ҚзҠ¶жҖҒйғҪе…·жңүиҮӘе·ұзҡ„еҠҹиғҪпјҢжҜ”еҚ•дёӘе·ЁеӨ§зҡ„зҠ¶жҖҒжӣҙе®№жҳ“иҜ»еҸ–гҖӮswitchиҜӯеҸҘпјҢ并е…Ғи®ёеҗ‘жҜҸдёӘзҠ¶жҖҒеҸ‘йҖҒе”ҜдёҖзҡ„дәӢ件数жҚ®гҖӮжӯӨеӨ–пјҢйҖҡиҝҮж¶ҲйҷӨдёҚеҝ…иҰҒзҡ„зҠ¶жҖҒиҪ¬жҚўжүҖйҖ жҲҗзҡ„еүҜдҪңз”ЁпјҢйӘҢиҜҒзҠ¶жҖҒиҪ¬жҚўеҸҜд»ҘйҳІжӯўе®ўжҲ·з«Ҝж»Ҙз”ЁгҖӮ
еҲ°жӯӨпјҢзӣёдҝЎеӨ§е®¶еҜ№вҖңCиҜӯиЁҖдёӯзҡ„зҠ¶жҖҒжңәжҳҜд»Җд№ҲвҖқжңүдәҶжӣҙж·ұзҡ„дәҶи§ЈпјҢдёҚеҰЁжқҘе®һйҷ…ж“ҚдҪңдёҖз•Әеҗ§пјҒиҝҷйҮҢжҳҜдәҝйҖҹдә‘зҪ‘з«ҷпјҢжӣҙеӨҡзӣёе…іеҶ…е®№еҸҜд»Ҙиҝӣе…Ҙзӣёе…ійў‘йҒ“иҝӣиЎҢжҹҘиҜўпјҢе…іжіЁжҲ‘们пјҢ继з»ӯеӯҰд№ пјҒ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ