您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章主要讲解了“Go程序的启动流程是什么”,文中的讲解内容简单清晰,易于学习与理解,下面请大家跟着小编的思路慢慢深入,一起来研究和学习“Go程序的启动流程是什么”吧!
查找入口
首先编译上文提到的示例程序:
$ GOFLAGS="-ldflags=-compressdwarf=false" go build
在命令中指定了 GOFLAGS 参数,这是因为在 Go1.11 起,为了减少二进制文件大小,调试信息会被压缩。导致在 MacOS 上使用 gdb 时无法理解压缩的 DWARF 的含义是什么(而我恰恰就是用的 MacOS)。
因此需要在本次调试中将其关闭,再使用 gdb 进行调试,以此达到观察的目的:
$ gdb awesomeProject (gdb) info files Symbols from "/Users/eddycjy/go-application/awesomeProject/awesomeProject". Local exec file: `/Users/eddycjy/go-application/awesomeProject/awesomeProject', file type mach-o-x86-64. Entry point: 0x1063c80 0x0000000001001000 - 0x00000000010a6aca is .text ... (gdb) b *0x1063c80 Breakpoint 1 at 0x1063c80: file /usr/local/Cellar/go/1.15/libexec/src/runtime/rt0_darwin_amd64.s, line 8.
通过 Entry point 的调试,可看到真正的程序入口在 runtime 包中,不同的计算机架构指向不同。例如:
MacOS 在 src/runtime/rt0_darwin_amd64.s。
Linux 在 src/runtime/rt0_linux_amd64.s。
其最终指向了 rt0_darwin_amd64.s 文件,这个文件名称非常的直观:
Breakpoint 1 at 0x1063c80: file /usr/local/Cellar/go/1.15/libexec/src/runtime/rt0_darwin_amd64.s, line 8.
rt0 代表 runtime0 的缩写,指代运行时的创世,超级奶爸:
darwin 代表目标操作系统(GOOS)。
amd64 代表目标操作系统架构(GOHOSTARCH)。
同时 Go 语言还支持更多的目标系统架构,例如:AMD64、AMR、MIPS、WASM 等:
源码目录
若有兴趣可到 src/runtime 目录下进一步查看,这里就不一一介绍了。
入口方法
在 rt0_linux_amd64.s 文件中,可发现 _rt0_amd64_darwin JMP 跳转到了 _rt0_amd64 方法:
TEXT _rt0_amd64_darwin(SB),NOSPLIT,$-8 JMP _rt0_amd64(SB) ...
紧接着又跳转到 runtime·rt0_go 方法:
TEXT _rt0_amd64(SB),NOSPLIT,$-8 MOVQ 0(SP), DI // argc LEAQ 8(SP), SI // argv JMP runtime·rt0_go(SB)
该方法将程序输入的 argc 和 argv 从内存移动到寄存器中。
栈指针(SP)的前两个值分别是 argc 和 argv,其对应参数的数量和具体各参数的值。
程序参数准备就绪后,正式初始化的方法落在 runtime·rt0_go 方法中:
TEXT runtime·rt0_go(SB),NOSPLIT,$0 ... CALL runtime·check(SB) MOVL 16(SP), AX // copy argc MOVL AX, 0(SP) MOVQ 24(SP), AX // copy argv MOVQ AX, 8(SP) CALL runtime·args(SB) CALL runtime·osinit(SB) CALL runtime·schedinit(SB) // create a new goroutine to start program MOVQ $runtime·mainPC(SB), AX // entry PUSHQ AX PUSHQ $0 // arg size CALL runtime·newproc(SB) POPQ AX POPQ AX // start this M CALL runtime·mstart(SB) ...
runtime.check:运行时类型检查,主要是校验编译器的翻译工作是否正确,是否有 “坑”。基本代码均为检查 int8 在 unsafe.Sizeof 方法下是否等于 1 这类动作。
runtime.args:系统参数传递,主要是将系统参数转换传递给程序使用。
runtime.osinit:系统基本参数设置,主要是获取 CPU 核心数和内存物理页大小。
runtime.schedinit:进行各种运行时组件的初始化,包含调度器、内存分配器、堆、栈、GC 等一大堆初始化工作。会进行 p 的初始化,并将 m0 和某一个 p 进行绑定。
runtime.main:主要工作是运行 main goroutine,虽然在runtime·rt0_go 中指向的是$runtime·mainPC,但实质指向的是 runtime.main。
runtime.newproc:创建一个新的 goroutine,且绑定 runtime.main 方法(也就是应用程序中的入口 main 方法)。并将其放入 m0 绑定的p的本地队列中去,以便后续调度。
runtime.mstart:启动 m,调度器开始进行循环调度。
在 runtime·rt0_go 方法中,其主要是完成各类运行时的检查,系统参数设置和获取,并进行大量的 Go 基础组件初始化。
初始化完毕后进行主协程(main goroutine)的运行,并放入等待队列(GMP 模型),最后调度器开始进行循环调度。
根据上述源码剖析,可以得出如下 Go 应用程序引导的流程图:
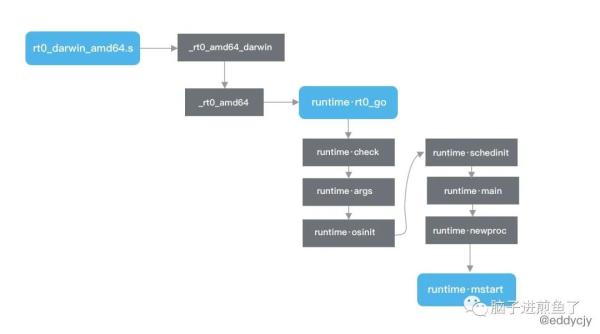
Go 程序引导过程
在 Go 语言中,实际的运行入口并不是用户日常所写的 main func,更不是 runtime.main 方法,而是从 rt0_*_amd64.s 开始,最终再一路 JMP 到 runtime·rt0_go 里去,再在该方法里完成一系列 Go 自身所需要完成的绝大部分初始化动作。
其中整体包括:
运行时类型检查、系统参数传递、CPU 核数获取及设置、运行时组件的初始化(调度器、内存分配器、堆、栈、GC 等)。
运行 main goroutine。
运行相应的 GMP 等大量缺省行为。
涉及到调度器相关的大量知识。
后续将会继续剖析将进一步剖析 runtime·rt0_go 里的爱与恨,尤其像是 runtime.main、runtime.schedinit 等调度方法,都有非常大的学习价值,有兴趣的小伙伴可以持续关注。
知道了 Go 程序是怎么引导起来的之后,我们需要了解 Go Runtime 中调度器是怎么流转的。
runtime.mstart
这里主要关注 runtime.mstart 方法:
func mstart() { // 获取 g0 _g_ := getg() // 确定栈边界 osStack := _g_.stack.lo == 0 if osStack { size := _g_.stack.hi if size == 0 { size = 8192 * sys.StackGuardMultiplier } _g_.stack.hi = uintptr(noescape(unsafe.Pointer(&size))) _g_.stack.lo = _g_.stack.hi - size + 1024 } _g_.stackguard0 = _g_.stack.lo + _StackGuard _g_.stackguard1 = _g_.stackguard0 // 启动 m,进行调度器循环调度 mstart1() // 退出线程 if mStackIsSystemAllocated() { osStack = true } mexit(osStack) }调用 getg 方法获取 GMP 模型中的 g,此处获取的是 g0。
通过检查 g 的执行栈 _g_.stack 的边界(堆栈的边界正好是 lo, hi)来确定是否为系统栈。若是,则根据系统栈初始化 g 执行栈的边界。
调用 mstart1 方法启动系统线程 m,进行调度器循环调度。
调用 mexit 方法退出系统线程 m。
runtime.mstart1
这么看来其实质逻辑在 mstart1 方法,我们继续往下剖析:
func mstart1() { // 获取 g,并判断是否为 g0 _g_ := getg() if _g_ != _g_.m.g0 { throw("bad runtime·mstart") } // 初始化 m 并记录调用方 pc、sp save(getcallerpc(), getcallersp()) asminit() minit() // 设置信号 handler if _g_.m == &m0 { mstartm0() } // 运行启动函数 if fn := _g_.m.mstartfn; fn != nil { fn() } if _g_.m != &m0 { acquirep(_g_.m.nextp.ptr()) _g_.m.nextp = 0 } schedule() }调用 getg 方法获取 g。并且通过前面绑定的 _g_.m.g0 判断所获取的 g 是否 g0。若不是,则直接抛出致命错误。因为调度器仅在 g0 上运行。
调用 minit 方法初始化 m,并记录调用方的 PC、SP,便于后续 schedule 阶段时的复用。
若确定当前的 g 所绑定的 m 是 m0,则调用 mstartm0 方法,设置信号 handler。该动作必须在 minit 方法之后,这样 minit 方法可以提前准备好线程,以便能够处理信号。
若当前 g 所绑定的 m 有启动函数,则运行。否则跳过。
若当前 g 所绑定的 m 不是 m0,则需要调用 acquirep 方法获取并绑定 p,也就是 m 与 p 绑定。
调用 schedule 方法进行正式调度。
忙活了一大圈,终于进入到开题的主菜了,原来潜伏的很深的 schedule 方法才是真正做调度的方法,其他都是前置处理和准备数据。
由于篇幅问题,schedule 方法会放到下篇再继续剖析,我们先聚焦本篇的一些细节点。
问题深剖
不过到这里篇幅也已经比较长了,积累了不少问题。我们针对在 Runtime 中出镜率最高的两个元素进行剖析:
鸿蒙官方战略合作共建——HarmonyOS技术社区
m0 是什么,作用是?
g0 是什么,作用是?
m0
m0 是 Go Runtime 所创建的第一个系统线程,一个 Go 进程只有一个 m0,也叫主线程。
从多个方面来看:
数据结构:m0 和其他创建的 m 没有任何区别。
创建过程:m0 是进程在启动时应该汇编直接复制给 m0 的,其他后续的 m 则都是 Go Runtime 内自行创建的。
变量声明:m0 和常规 m 一样,m0 的定义就是 var m0 m,没什么特别之处。
g0
g 一般分为三种,分别是:
执行用户任务的叫做 g。
执行 runtime.main 的 main goroutine。
执行调度任务的叫 g0。。
g0 比较特殊,每一个 m 都只有一个 g0(仅此只有一个 g0),且每个 m 都只会绑定一个 g0。在 g0 的赋值上也是通过汇编赋值的,其余后续所创建的都是常规的 g。
从多个方面来看:
数据结构:g0 和其他创建的 g 在数据结构上是一样的,但是存在栈的差别。在 g0 上的栈分配的是系统栈,在 Linux 上栈大小默认固定 8MB,不能扩缩容。而常规的 g 起始只有 2KB,可扩容。
运行状态:g0 和常规的 g 不一样,没有那么多种运行状态,也不会被调度程序抢占,调度本身就是在 g0 上运行的。
变量声明:g0 和常规 g,g0 的定义就是 var g0 g,没什么特别之处。
感谢各位的阅读,以上就是“Go程序的启动流程是什么”的内容了,经过本文的学习后,相信大家对Go程序的启动流程是什么这一问题有了更深刻的体会,具体使用情况还需要大家实践验证。这里是亿速云,小编将为大家推送更多相关知识点的文章,欢迎关注!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。