您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章主要介绍web开发中怎么计算模型以及中间变量的显存占用大小,文中介绍的非常详细,具有一定的参考价值,感兴趣的小伙伴们一定要看完!
torch.FatalError: cuda runtime error (2) : out of memory at /opt/conda/conda-bld/pytorch_1524590031827/work/aten/src/THC/generic/THCStorage.cu:58
想必这是所有炼丹师们最不想看到的错误,没有之一。
OUT OF MEMORY ,显然是显存装不下你那么多的模型权重还有中间变量,然后程序奔溃了。怎么办,其实办法有很多,及时清空中间变量,优化代码,减少batch,等等等等,都能够减少显存溢出的风险。
但是这篇要说的是上面这一切优化操作的基础,如何去计算我们所使用的显存。学会如何计算出来我们设计的模型以及中间变量所占显存的大小,想必知道了这一点,我们对自己显存也就会得心应手了。
首先我们应该了解一下基本的数据量信息:
1 G = 1000 MB
1 M = 1000 KB
1 K = 1000 Byte
1 B = 8 bit
好,肯定有人会问为什么是1000而不是1024,这里不过多讨论,只能说两种说法都是正确的,只是应用场景略有不同。这里统一按照上面的标准进行计算。
然后我们说一下我们平常使用的向量所占的空间大小,以Pytorch官方的数据格式为例(所有的深度学习框架数据格式都遵循同一个标准):
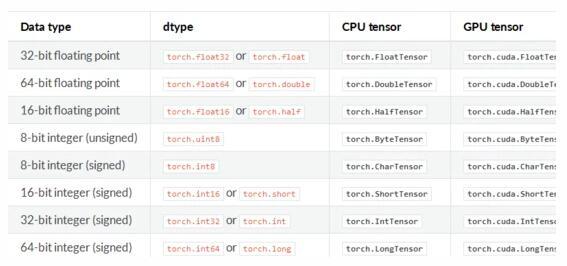
我们只需要看左边的信息,在平常的训练中,我们经常使用的一般是这两种类型:
float32 单精度浮点型
int32 整型
一般一个8-bit的整型变量所占的空间为 1B 也就是 8bit 。而32位的float则占 4B 也就是 32bit 。而双精度浮点型double和长整型long在平常的训练中我们一般不会使用。
ps:消费级显卡对单精度计算有优化,服务器级别显卡对双精度计算有优化。
也就是说,假设有一幅RGB三通道真彩色图片,长宽分别为500 x 500,数据类型为单精度浮点型,那么这张图所占的显存的大小为:500 x 500 x 3 x 4B = 3M。
而一个(256,3,100,100)-(N,C,H,W)的FloatTensor所占的空间为256 x 3 x 100 x 100 x 4B = 31M
不多是吧,没关系,好戏才刚刚开始。
看起来一张图片(3x256x256)和卷积层(256x100x100)所占的空间并不大,那为什么我们的显存依旧还是用的比较多,原因很简单,占用显存比较多空间的并不是我们输入图像,而是神经网络中的中间变量以及使用optimizer算法时产生的巨量的中间参数。
我们首先来简单计算一下Vgg16这个net需要占用的显存:
通常一个模型占用的显存也就是两部分:
模型自身的参数(params)
模型计算产生的中间变量(memory)

图片来自cs231n,这是一个典型的sequential-net,自上而下很顺畅,我们可以看到我们输入的是一张224x224x3的三通道图像,可以看到一张图像只占用 150x4k ,但上面是 150k ,这是因为这里在计算的时候默认的数据格式是8-bit而不是32-bit,所以最后的结果要乘上一个4。
我们可以看到,左边的memory值代表:图像输入进去,图片以及所产生的中间卷积层所占的空间。我们都知道,这些形形色色的深层卷积层也就是深度神经网络进行“思考”的过程:
图片从3通道变为64 --> 128 --> 256 --> 512 .... 这些都是卷积层,而我们的显存也主要是他们占用了。
还有上面右边的params,这些是神经网络的权重大小,可以看到第一层卷积是3x3,而输入图像的通道是3,输出通道是64,所以很显然,第一个卷积层权重所占的空间是 (3 x 3 x 3) x 64。
另外还有一个需要注意的是中间变量在backward的时候会翻倍!
举个例子,下面是一个计算图,输入 x ,经过中间结果 z ,然后得到最终变量 L :

我们在backward的时候需要保存下来的中间值。输出是 L ,然后输入 x ,我们在backward的时候要求 L 对 x 的梯度,这个时候就需要在计算链 L 和 x 中间的 z :
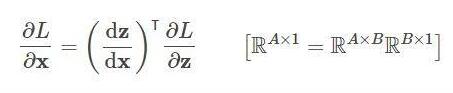
dz/dx 这个中间值当然要保留下来以用于计算,所以粗略估计, backward 的时候中间变量的占用了是 forward 的两倍!
要注意,优化器也会占用我们的显存!
为什么,看这个式子:
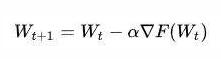
上式是典型的SGD随机下降法的总体公式,权重 W 在进行更新的时候,会产生保存中间变量 ,也就是在优化的时候,模型中的params参数所占用的显存量会翻倍。
,也就是在优化的时候,模型中的params参数所占用的显存量会翻倍。
当然这只是SGD优化器,其他复杂的优化器如果在计算时需要的中间变量多的时候,就会占用更多的内存。
有参数的层即会占用显存的层。我们一般的卷积层都会占用显存,而我们经常使用的激活层Relu没有参数就不会占用了。
占用显存的层一般是:
卷积层,通常的conv2d
全连接层,也就是Linear层
BatchNorm层
Embedding层
而不占用显存的则是:
刚才说到的激活层Relu等
池化层
Dropout层
具体计算方式:
Conv2d(Cin, Cout, K): 参数数目:Cin × Cout × K × K
Linear(M->N): 参数数目:M×N
BatchNorm(N): 参数数目: 2N
Embedding(N,W): 参数数目: N × W
总结一下,我们在总体的训练中,占用显存大概分以下几类:
模型中的参数(卷积层或其他有参数的层)
模型在计算时产生的中间参数(也就是输入图像在计算时每一层产生的输入和输出)
backward的时候产生的额外的中间参数
优化器在优化时产生的额外的模型参数
但其实,我们占用的显存空间为什么比我们理论计算的还要大,原因大概是因为深度学习框架一些额外的开销吧,不过如果通过上面公式,理论计算出来的显存和实际不会差太多的。
以上是“web开发中怎么计算模型以及中间变量的显存占用大小”这篇文章的所有内容,感谢各位的阅读!希望分享的内容对大家有帮助,更多相关知识,欢迎关注亿速云行业资讯频道!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。