您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
1.舵机原理简介
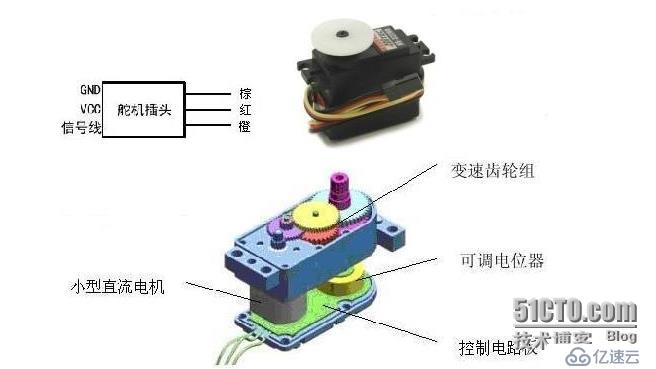
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
2.arduino下位机源码
相关源码已压缩上传,需要请下载对应附件
#include<Servo.h> //库文件
Servo servo1;
static int v=0;
String mycommand="";
void setup()
{
Serial.begin(9600);//此处为串口设置的波特率 ,可以修改 必须同上位机设置的波特路一致。
servo1.attach(3); // 控制的端口是~3号
servo1.write(90);
}
void loop()
{
while(Serial.available()>0)
{
mycommand+=char(Serial.read());
delay(2);
}
for(int m=0;m<mycommand.length();m++) //
{
char ch = mycommand[m]; //读取串口数据
switch(ch)
{
case '0'...'9':
v = v*10 + ch - '0'; //字符转换成十进制
break;
case 'a': //如果数据后带a,则表示是一号舵机的数据,比如串口发送85a
//if(v >= 5 || v <= 175 )
servo1.write(v); // 让A从66度旋转到9度 (可修改角度)
//用于设定舵机旋转角度的语句,可设定的角度范围是0°到180°,“V”得到所输入的值而改变角度,比如85a为85度角
Serial.println(v+"°");//舵机角度改变后 发送改变的角度到上位机。
v = 0;
break;
}
}
mycommand="";
} 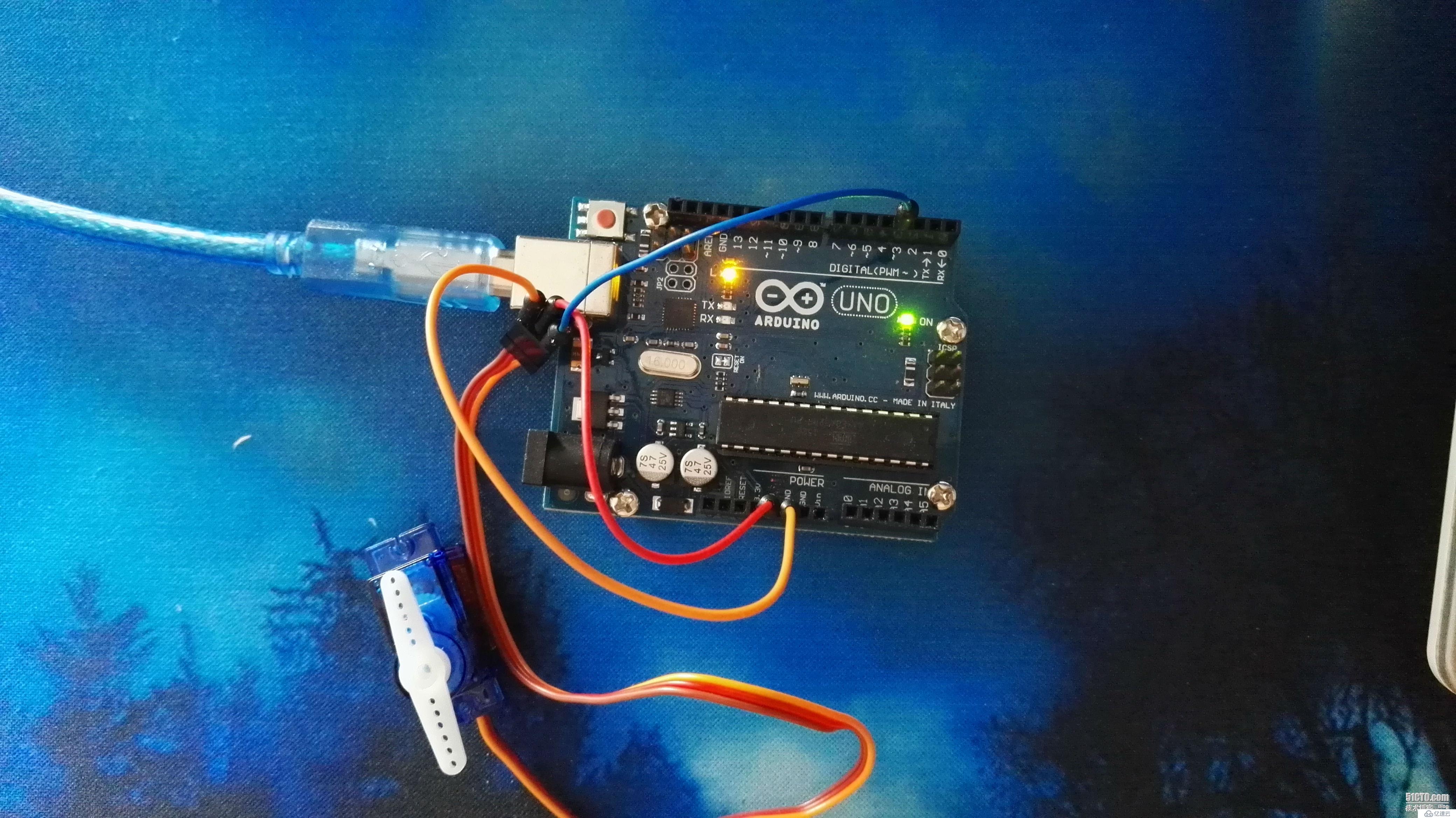
我选择我的是arduino Uno,舵机的接线方法是红色(VCC)端接控制板的5V处,棕色端接板子的GND,舵机的橙色线为信号线,接板子上的3号口;
3.C#上位机源码及界面
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace 舵机上位机源码
{
public partial class Form1 : Form
{
bool open = false;
public delegate void HandleInterfaceUpdataDelegate(string text);
private HandleInterfaceUpdataDelegate interfaceUpdataHandle;
int a;
public Form1()
{
InitializeComponent();
}
private void Form1_Load(object sender, EventArgs e)
{
comboBox1.Items.AddRange(System.IO.Ports.SerialPort.GetPortNames());//从系统获取已有串口
if (comboBox1.Items.Count > 0)
{
comboBox1.SelectedIndex = 0;//串口变量初始化
serialPort1.RtsEnable = true;//DataReceived事件委托
serialPort1.ReceivedBytesThreshold = 1;//设置 DataReceived 事件发生前内部输入缓冲区中的字节数
serialPort1.DataReceived += new System.IO.Ports.SerialDataReceivedEventHandler(this.serialPort1_DataReceived);
comboBox2.SelectedIndex = 6;
}
else
{
MessageBox.Show("未检测到设备\r\n");
}
}
//监听串口
private void serialPort1_DataReceived(object sender, System.IO.Ports.SerialDataReceivedEventArgs e)
{
try
{
string text = string.Empty;
byte[] result = new byte[serialPort1.BytesToRead];
serialPort1.Read(result, 0, serialPort1.BytesToRead);
text = Encoding.UTF8.GetString(result);
}
catch
{
}
}
//串口刷新按钮
private void button2_Click(object sender, EventArgs e)
{
comboBox1.Items.Clear();
comboBox1.Items.AddRange(System.IO.Ports.SerialPort.GetPortNames());
if (comboBox1.Items.Count > 0)
{
comboBox1.SelectedIndex = 0;
}
else
{
MessageBox.Show("未检测到串口\r\n");
}
}
//打开串口
private void btnOpen_Click(object sender, EventArgs e)
{
if (open == false)
{
if (serialPort1.IsOpen)
{
MessageBox.Show("串口已经打开", "提示", MessageBoxButtons.OK, MessageBoxIcon.Information);
return;
}
//串口
if (comboBox1.Text == string.Empty)
{
MessageBox.Show("请选择串口", "提示", MessageBoxButtons.OK, MessageBoxIcon.Information);
return;
}
//波特率
if (comboBox2.Text == string.Empty)
{
MessageBox.Show("请选择波特率", "提示", MessageBoxButtons.OK, MessageBoxIcon.Information);
return;
}
serialPort1.BaudRate = int.Parse(comboBox2.Text);
try
{
serialPort1.PortName = comboBox1.SelectedItem.ToString();
serialPort1.Open();
}
catch
{
try
{
comboBox1.SelectedIndex = comboBox1.SelectedIndex + 1;
}
catch
{
comboBox1.SelectedIndex = 0;
}
serialPort1.Close();
}
btnOpen.Text = "关闭";
comboBox1.Enabled = false;
comboBox2.Enabled = false;
open = true;
trackBarSend_Scroll(this, null);
btnReserch.Enabled = false;
btnsend.Enabled = true;
tbxSend.Enabled = true;
trackBarSend.Enabled = true;
pictureBox1.BackColor = Color.Lime;
}
else
{
try
{
serialPort1.Close();
btnOpen.Text = "打开";
open = false;
comboBox1.Enabled = true;
comboBox2.Enabled = true;
btnReserch.Enabled = true;
btnsend.Enabled = false;
tbxSend.Enabled = false;
trackBarSend.Enabled = false;
pictureBox1.BackColor = Color.Silver;
}
catch
{
}
}
}
private void trackBarSend_Scroll(object sender, EventArgs e)
{
if (serialPort1.IsOpen)
{
a = trackBarSend.Value;
string duojiA = trackBarSend.Value.ToString() + "a";
try
{
serialPort1.WriteLine(duojiA);
tbxSend.Text = a.ToString(); ; ;
}
catch
{
}
}
}
private void btnsend_Click(object sender, EventArgs e)
{
try
{
byte[] SendBuf = new byte[100000];
SendBuf = System.Text.Encoding.Default.GetBytes(tbxSend.Text+"a");
serialPort1.Write(SendBuf, 0, SendBuf.Length);
}
catch (Exception err)
{
if (serialPort1.IsOpen)
serialPort1.Close();//如果是写数据时出错,此时窗口状态为开,就应关闭串口,防止下次不能使用,串口是不能重复打开和关闭的
MessageBox.Show(err.ToString(), "错误");
}
}
private void tbxSend_ValueChanged(object sender, EventArgs e)
{
trackBarSend.Value = (int)tbxSend.Value;
}
}
}


未连接设备状态
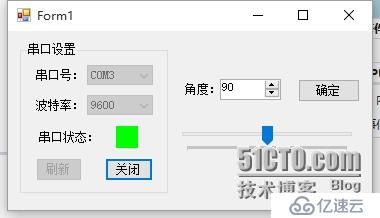
连接设备后

这是自己做的机械臂控制软件 相关源码也有
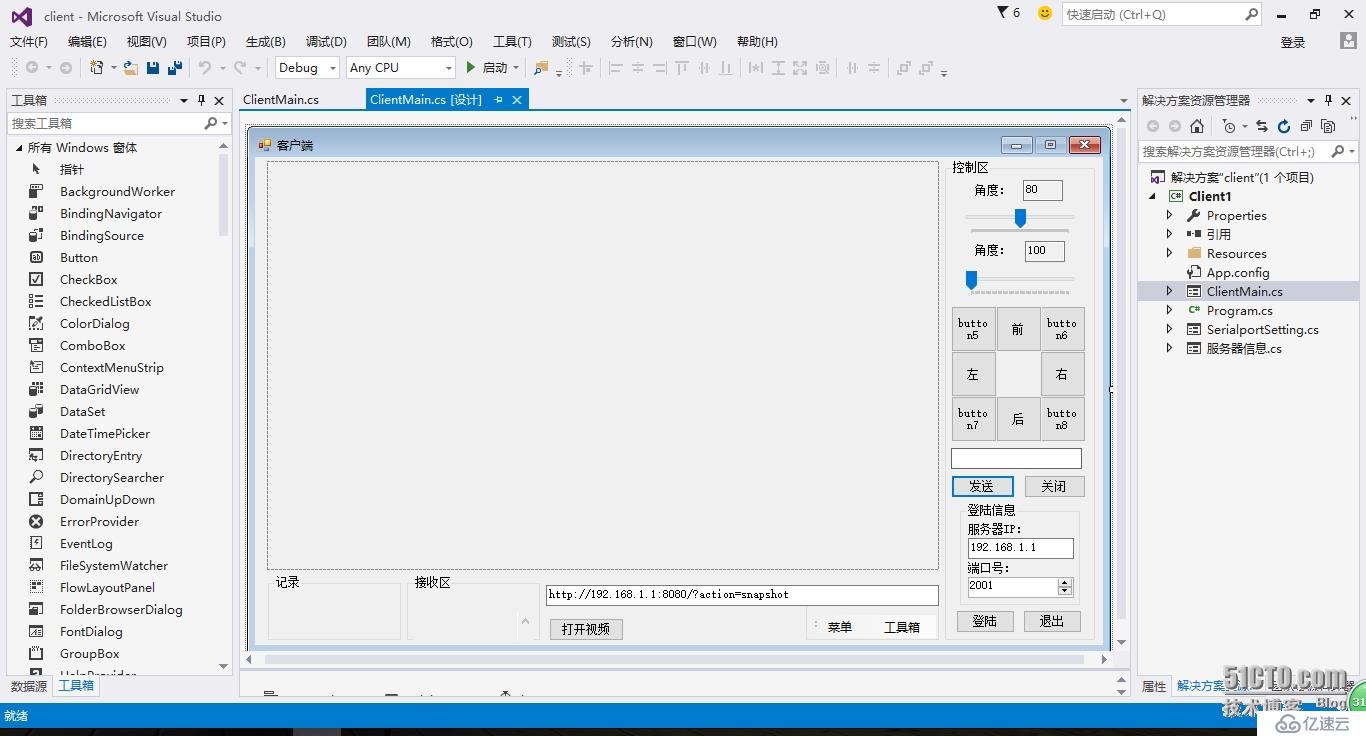
这是wifi智能小车控制软件
第一次写博文,有不好的地方还请多多包涵。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。