жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
жң¬зҜҮж–Үз« з»ҷеӨ§е®¶еҲҶдә«зҡ„жҳҜжңүе…іOpenCVдёӯжҖҺд№Ҳе®һзҺ°еҸҜеҲҶзҰ»ж»ӨжіўпјҢе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еӯҰд№ пјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« еҗҺеҸҜд»ҘжңүжүҖ收иҺ·пјҢиҜқдёҚеӨҡиҜҙпјҢи·ҹзқҖе°Ҹзј–дёҖиө·жқҘзңӢзңӢеҗ§гҖӮ
ж— и®әжҳҜеӣҫеғҸеҚ·з§ҜиҝҳжҳҜж»ӨжіўпјҢеңЁеҺҹеӣҫеғҸдёҠ移еҠЁж»ӨжіўеҷЁзҡ„иҝҮзЁӢдёӯжҜҸдёҖж¬Ўзҡ„и®Ўз®—з»“жһңйғҪдёҚдјҡеҪұе“ҚеҲ°еҗҺйқўиҝҮзЁӢзҡ„и®Ўз®—з»“жһңпјҢеӣ жӯӨеӣҫеғҸж»ӨжіўжҳҜдёҖдёӘ并иЎҢзҡ„з®—жі•пјҢеңЁеҸҜд»ҘжҸҗдҫӣ并иЎҢи®Ўз®—зҡ„еӨ„зҗҶеҷЁдёӯеҸҜд»ҘжһҒеӨ§зҡ„еҠ еҝ«еӣҫеғҸж»Өжіўзҡ„еӨ„зҗҶйҖҹеәҰгҖӮ
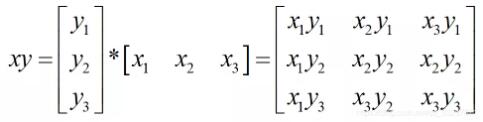
е…ҲеҜ№XпјҲYпјүж–№еҗ‘ж»ӨжіўпјҢеҶҚеҜ№YпјҲXпјүж–№еҗ‘ж»Өжіўзҡ„з»“жһңдёҺе°ҶдёӨдёӘж–№еҗ‘зҡ„ж»ӨжіўеҷЁиҒ”еҗҲеҗҺж•ҙдҪ“ж»Өжіўзҡ„з»“жһңзӣёеҗҢгҖӮдёӨдёӘж–№еҗ‘зҡ„ж»ӨжіўеҷЁзҡ„иҒ”еҗҲе°ұжҳҜе°ҶдёӨдёӘж–№еҗ‘зҡ„ж»ӨжіўеҷЁзӣёд№ҳпјҢеҫ—еҲ°дёҖдёӘзҹ©еҪўзҡ„ж»ӨжіўеҷЁ
void filter2D( InputArray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor = Point(-1,-1), double delta = 0, int borderType = BORDER_DEFAULT );
srcпјҡеҫ…ж»ӨжіўеӣҫеғҸ
dstпјҡиҫ“еҮәеӣҫеғҸпјҢдёҺиҫ“е…ҘеӣҫеғҸsrcе…·жңүзӣёеҗҢзҡ„е°әеҜёгҖҒйҖҡйҒ“ж•°е’Ңж•°жҚ®зұ»еһӢгҖӮ
ddepthпјҡиҫ“еҮәеӣҫеғҸзҡ„ж•°жҚ®зұ»еһӢпјҲж·ұеәҰпјүпјҢж №жҚ®иҫ“е…ҘеӣҫеғҸзҡ„ж•°жҚ®зұ»еһӢдёҚеҗҢжӢҘжңүдёҚеҗҢзҡ„еҸ–еҖјиҢғеӣҙпјҢе…·дҪ“зҡ„еҸ–еҖјиҢғеӣҙеңЁиЎЁ5-1з»ҷеҮәпјҢеҪ“иөӢеҖјдёә-1ж—¶пјҢиҫ“еҮәеӣҫеғҸзҡ„ж•°жҚ®зұ»еһӢиҮӘеҠЁйҖүжӢ©гҖӮ
kernelпјҡж»ӨжіўеҷЁгҖӮ
anchorпјҡеҶ…ж ёзҡ„еҹәеҮҶзӮ№(й”ҡзӮ№)пјҢе…¶й»ҳи®ӨеҖјдёә(-1,-1)д»ЈиЎЁеҶ…ж ёеҹәеҮҶзӮ№дҪҚдәҺkernelзҡ„дёӯеҝғдҪҚзҪ®гҖӮеҹәеҮҶзӮ№еҚіеҚ·з§Ҝж ёдёӯдёҺиҝӣиЎҢеӨ„зҗҶзҡ„еғҸзҙ зӮ№йҮҚеҗҲзҡ„зӮ№пјҢе…¶дҪҚзҪ®еҝ…йЎ»еңЁеҚ·з§Ҝж ёзҡ„еҶ…йғЁгҖӮ
deltaпјҡеҒҸеҖјпјҢеңЁи®Ўз®—з»“жһңдёӯеҠ дёҠеҒҸеҖјгҖӮ
borderTypeпјҡеғҸзҙ еӨ–жҺЁжі•йҖүжӢ©ж Үеҝ—пјҢеҸ–еҖјиҢғеӣҙеңЁиЎЁ3-5дёӯз»ҷеҮәгҖӮй»ҳи®ӨеҸӮж•°дёәBORDER_DEFAULTпјҢиЎЁзӨәдёҚеҢ…еҗ«иҫ№з•ҢеҖјеҖ’еәҸеЎ«е……гҖӮ
void sepFilter2D( InputArray src, OutputArray dst, int ddepth, InputArray kernelX, InputArray kernelY, Point anchor = Point(-1,-1), double delta = 0, int borderType = BORDER_DEFAULT );
srcпјҡеҫ…ж»ӨжіўеӣҫеғҸ
dstпјҡиҫ“еҮәеӣҫеғҸпјҢдёҺиҫ“е…ҘеӣҫеғҸsrcе…·жңүзӣёеҗҢзҡ„е°әеҜёгҖҒйҖҡйҒ“ж•°е’Ңж•°жҚ®зұ»еһӢгҖӮ
ddepthпјҡиҫ“еҮәеӣҫеғҸзҡ„ж•°жҚ®зұ»еһӢпјҲж·ұеәҰпјүпјҢж №жҚ®иҫ“е…ҘеӣҫеғҸзҡ„ж•°жҚ®зұ»еһӢдёҚеҗҢжӢҘжңүдёҚеҗҢзҡ„еҸ–еҖјиҢғеӣҙпјҢе…·дҪ“зҡ„еҸ–еҖјиҢғеӣҙеңЁиЎЁ5-1з»ҷеҮәпјҢеҪ“иөӢеҖјдёә-1ж—¶пјҢиҫ“еҮәеӣҫеғҸзҡ„ж•°жҚ®зұ»еһӢиҮӘеҠЁйҖүжӢ©гҖӮ
kernelXпјҡXж–№еҗ‘зҡ„ж»ӨжіўеҷЁпјҢ
kernelYпјҡYж–№еҗ‘зҡ„ж»ӨжіўеҷЁгҖӮ
anchorпјҡеҶ…ж ёзҡ„еҹәеҮҶзӮ№(й”ҡзӮ№)пјҢе…¶й»ҳи®ӨеҖјдёә(-1,-1)д»ЈиЎЁеҶ…ж ёеҹәеҮҶзӮ№дҪҚдәҺkernelзҡ„дёӯеҝғдҪҚзҪ®гҖӮеҹәеҮҶзӮ№еҚіеҚ·з§Ҝж ёдёӯдёҺиҝӣиЎҢеӨ„зҗҶзҡ„еғҸзҙ зӮ№йҮҚеҗҲзҡ„зӮ№пјҢе…¶дҪҚзҪ®еҝ…йЎ»еңЁеҚ·з§Ҝж ёзҡ„еҶ…йғЁгҖӮ
deltaпјҡеҒҸеҖјпјҢеңЁи®Ўз®—з»“жһңдёӯеҠ дёҠеҒҸеҖјгҖӮ
borderTypeпјҡеғҸзҙ еӨ–жҺЁжі•йҖүжӢ©ж Үеҝ—пјҢеҸ–еҖјиҢғеӣҙеңЁиЎЁ3-5дёӯз»ҷеҮәгҖӮй»ҳи®ӨеҸӮж•°дёәBORDER_DEFAULTпјҢиЎЁзӨәдёҚеҢ…еҗ«иҫ№з•ҢеҖјеҖ’еәҸеЎ«е……гҖӮ
//
// Created by smallflyfly on 2021/6/15.
//
#include "opencv2/highgui.hpp"
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace std;
using namespace cv;
int main() {
float points[] = {
1, 2, 3, 4, 5,
6, 7, 8, 9, 10,
11, 12, 13, 14, 15,
16, 17, 18, 19, 20,
21, 22, 23, 24, 25
};
Mat data(5, 5, CV_32FC1, points);
// йӘҢиҜҒй«ҳж–Ҝж»ӨжіўеҷЁеҸҜеҲҶзҰ»
Mat gaussX = getGaussianKernel(3, 1);
cout << gaussX << endl;
Mat gaussDstData, gaussDataXY;
GaussianBlur(data, gaussDstData, Size(3, 3), 1, 1, BORDER_CONSTANT);
sepFilter2D(data, gaussDataXY, -1, gaussX, gaussX, Point(-1, -1), 0, BORDER_CONSTANT);
cout << gaussDstData << endl;
cout << gaussDataXY << endl;
cout << "######################################" << endl;
// Yж–№еҗ‘дёҠж»Өжіў
Mat a = (Mat_<float>(3, 1) << -1, 3, -1);
// Xж–№еҗ‘дёҠж»Өжіў
Mat b = a.reshape(1, 1);
// XYиҒ”еҗҲж»Өжіў
Mat ab = a * b;
Mat dataX, dataY, dataXY1, dataXY2, dataSepXY;
filter2D(data, dataX, -1, b);
filter2D(dataX, dataXY1, -1, a);
filter2D(data, dataXY2, -1, ab);
sepFilter2D(data, dataSepXY, -1, a, b);
// йӘҢиҜҒз»“жһң
cout << dataXY1 << endl;
cout << dataXY2 << endl;
cout << dataSepXY << endl;
Mat im = imread("test.jpg");
resize(im, im, Size(0, 0), 0.5, 0.5);
Mat imX, imY, imXY, imSepXY;
filter2D(im, imX, -1, b);
filter2D(imX, imXY, -1, a);
sepFilter2D(im, imSepXY, -1, a, b);
imshow("imXY", imXY);
imshow("imSepXY", imSepXY);
waitKey(0);
destroyAllWindows();
return 0;
}д»ҘдёҠе°ұжҳҜOpenCVдёӯжҖҺд№Ҳе®һзҺ°еҸҜеҲҶзҰ»ж»ӨжіўпјҢе°Ҹзј–зӣёдҝЎжңүйғЁеҲҶзҹҘиҜҶзӮ№еҸҜиғҪжҳҜжҲ‘们ж—Ҙеёёе·ҘдҪңдјҡи§ҒеҲ°жҲ–з”ЁеҲ°зҡ„гҖӮеёҢжңӣдҪ иғҪйҖҡиҝҮиҝҷзҜҮж–Үз« еӯҰеҲ°жӣҙеӨҡзҹҘиҜҶгҖӮжӣҙеӨҡиҜҰжғ…敬иҜ·е…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“гҖӮ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ