жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
иҝҷзҜҮж–Үз« дё»иҰҒд»Ӣз»ҚOpenCVеҰӮдҪ•е®һзҺ°дҪҺеҜ№жҜ”еәҰеӣҫеғҸи„ҸжұЎеҢәеҹҹжЈҖжөӢпјҢж–Үдёӯд»Ӣз»Қзҡ„йқһеёёиҜҰз»ҶпјҢе…·жңүдёҖе®ҡзҡ„еҸӮиҖғд»·еҖјпјҢж„ҹе…ҙи¶Јзҡ„е°Ҹдјҷдјҙ们дёҖе®ҡиҰҒзңӢе®ҢпјҒ
е…ҲдёҠеӣҫпјҡ


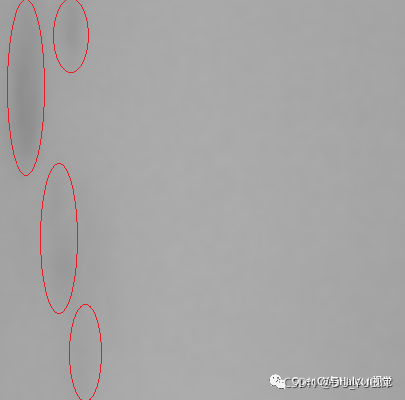
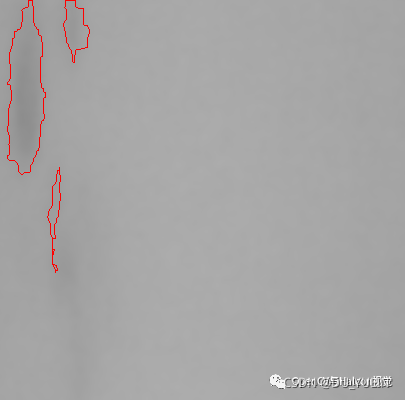
第дёҖеј еӣҫеҰӮжһңдёҚжҳҜж ҮжіЁз»“жһңпјҢжҲ‘йғҪжІЎжңүеҸ‘зҺ°и„ҸжұЎеҢәеҹҹеңЁе“ӘйҮҢпјҢ第дәҢеј еӣҫиҝҳжё…жҷ°дёҖдәӣпјҢеҹәжң¬еҸҜд»ҘзңӢеҮәжқҘеӣҫеғҸйқ иҝ‘е·Ұиҫ№зјҳзҡ„дҪҚзҪ®жңүеҒҸжҡ—зҡ„еҢәеҹҹпјҢиҝҷе°ұжҳҜжҲ‘们жүҖиҜҙзҡ„и„ҸжұЎеҢәеҹҹдәҶпјҢд№ҹжҳҜжҲ‘们иҰҒжЈҖжөӢзҡ„еҢәеҹҹгҖӮ
ж ҮжіЁз»“жһңеӣҫпјҡ

иҝҷйҮҢд»Ӣз»ҚдёӨз§Қе®һзҺ°ж–№жі•пјҢ
第дёҖз§ҚжҳҜз”ЁC++е®һзҺ°еҸӮиҖғеҚҡж–Үзҡ„ж–№жі•пјҢеҚіеҲ©з”ЁжўҜеәҰж–№жі•жқҘжЈҖжөӢпјҢе…·дҪ“жӯҘйӘӨеҰӮдёӢпјҡ
еҜ№еӣҫеғҸиҝӣиЎҢй«ҳж–ҜжЁЎзіҠеҺ»еҷӘпјҢжўҜеәҰи®Ўз®—еҜ№еҷӘеЈ°еҫҲж•Ҹж„ҹпјӣ
и°ғз”ЁSobelеҮҪж•°и®Ўз®—еӣҫеғҸеңЁx,yж–№еҗ‘жўҜеәҰпјӣ
и°ғз”ЁconvertScaleAbsеҮҪж•°е°Ҷx,yжўҜеәҰеӣҫеғҸеғҸзҙ еҖјйҷҗеҲ¶еңЁ0-255пјӣ
и°ғз”ЁaddWeightеҮҪж•°е°Ҷx,yжўҜеәҰеӣҫеғҸиһҚеҗҲпјӣ
и°ғз”ЁthresholdеҮҪж•°еҜ№иһҚеҗҲеӣҫеғҸиҝӣиЎҢдәҢеҖјеҢ–пјӣ
дҪҝз”Ёе…Ҳи…җиҡҖгҖҒеҗҺиҶЁиғҖзҡ„еҪўжҖҒеӯҰеӨ„зҗҶж–№жі•еҜ№дәҢеҖјеӣҫеғҸиҝӣиЎҢйқһи„ҸжұЎеҢәеҹҹиҝҮж»Өпјӣ
и°ғз”ЁfindContoursж–№жі•жҹҘжүҫи„ҸжұЎеҢәеҹҹиҪ®е»“гҖӮ
第дәҢз§Қж–№жі•жҳҜжң¬дәәж №жҚ®жҸҗй«ҳеӣҫеғҸеҜ№жҜ”еәҰжҖқи·Ҝе®һзҺ°зҡ„пјҢе…·дҪ“жӯҘйӘӨеҰӮдёӢпјҡ
8. еҜ№еӣҫеғҸиҝӣиЎҢй«ҳж–ҜжЁЎзіҠеҺ»еҷӘпјӣ
9. дҪҝз”ЁеұҖйғЁзӣҙж–№еӣҫеқҮиЎЎеҢ–ж–№жі•жқҘжҸҗй«ҳеӣҫеғҸеҜ№жҜ”еәҰпјӣ
10. дҪҝз”ЁOTSUдәҢеҖјеҢ–йҳҲеҖјж–№жі•жқҘзІ—з•ҘеҲҶеүІи„ҸжұЎеҢәеҹҹпјӣ
11. еҜ№дәҢеҖјеӣҫеғҸдҪҝз”Ёи…җиҡҖзҡ„еҪўжҖҒеӯҰж“ҚдҪңиҝҮж»ӨжҺүйғЁеҲҶйқһи„ҸжұЎеҢәеҹҹпјӣ
12. и°ғз”ЁfindContoursж–№жі•жҹҘжүҫи„ҸжұЎеҢәеҹҹиҪ®е»“гҖӮ
#include <iostream>
#include <opencv2\imgcodecs.hpp>
#include <opencv2\core.hpp>
#include <opencv2\imgproc.hpp>
#include <opencv2\highgui.hpp>
#include <vector>
int main()
{
using namespace cv;
std::string strImgFile = "C:\\Temp\\common\\Workspace\\Opencv\\images\\led1.jpg";
Mat mSrc = imread(strImgFile);
CV_Assert(mSrc.empty() == false);
Mat mSrc2 = mSrc.clone();
CV_Assert(mSrc2.empty() == false);
Mat mGray;
cvtColor(mSrc, mGray, COLOR_BGR2GRAY);
GaussianBlur(mGray, mGray, Size(5, 5), 1.0);
Mat mGray2 = mGray.clone();
CV_Assert(mGray.empty() == false);
imshow("gray", mGray.clone());
//ж–№жі•1пјҡеҲ©з”ЁжўҜеәҰеҸҳеҢ–жЈҖжөӢзјәйҷ·
Mat mSobelX, mSobelY;
Sobel(mGray, mSobelX, CV_16S, 1, 0, 7);
Sobel(mGray, mSobelY, CV_16S, 0, 1, 7);
convertScaleAbs(mSobelX, mSobelX);
convertScaleAbs(mSobelY, mSobelY);
Mat mEdge;
addWeighted(mSobelX, 1, mSobelY, 1, 0, mEdge);
imshow("edge", mEdge);
Mat mThresh;
threshold(mEdge, mThresh, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("thresh", mThresh);
Mat kernel1 = getStructuringElement(MORPH_RECT, Size(11, 11));
CV_Assert(kernel1.empty() == false);
Mat mMorph;
morphologyEx(mThresh, mMorph, MORPH_ERODE, kernel1);
imshow("erode", mMorph);
Mat kernel2 = getStructuringElement(MORPH_RECT, Size(5, 5));
morphologyEx(mMorph, mMorph, MORPH_DILATE, kernel2);
imshow("dilate", mMorph);
std::vector<std::vector<Point>> contours;
findContours(mMorph, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (int i = 0; i < contours.size(); i++)
{
float area = contourArea(contours[i]);
if (area > 200)
{
drawContours(mSrc, contours, i, Scalar(0, 0, 255));
}
}
imshow("result1", mSrc.clone());
//ж–№жі•2пјҡ еҲ©з”ЁеұҖйғЁзӣҙж–№еӣҫеқҮиЎЎеҢ–ж–№жі•жЈҖжөӢзјәйҷ·
Ptr<CLAHE> ptrCLAHE = createCLAHE(20, Size(30, 30));
ptrCLAHE->apply(mGray2, mGray2);
imshow("equalizeHist", mGray2);
Mat mThresh3;
threshold(mGray2, mThresh3, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
CV_Assert(mThresh3.empty() == false);
imshow("thresh", mThresh3);
Mat kernel2_1 = getStructuringElement(MORPH_RECT, Size(9, 9));
Mat mMorph3;
morphologyEx(mThresh3, mMorph3, MORPH_ERODE, kernel2_1);
CV_Assert(mMorph3.empty() == false);
imshow("morph3", mMorph3);
std::vector<std::vector<Point>> contours2;
findContours(mMorph3, contours2, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (int i = 0; i < contours2.size(); i++)
{
float area = contourArea(contours2[i]);
if (area > 200)
{
drawContours(mSrc2, contours2, i, Scalar(0, 0, 255));
}
}
imshow("result2", mSrc2);
waitKey(0);
destroyAllWindows();
system("pause");
return 0;
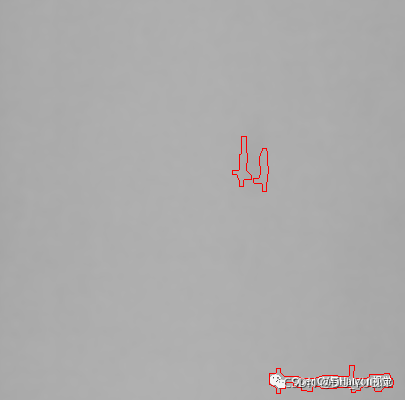
}жўҜеәҰж–№жі•жЈҖжөӢз»“жһңпјҡ
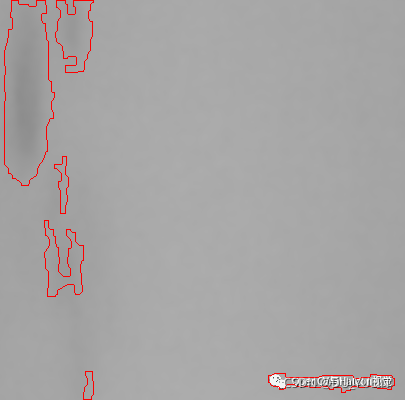
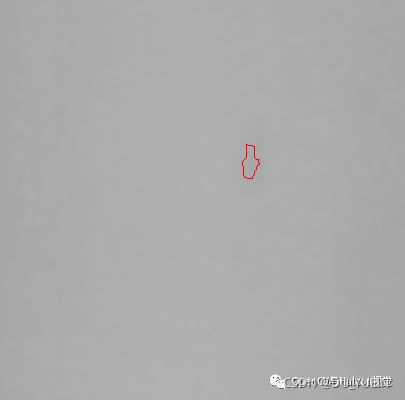
еұҖйғЁзӣҙж–№еӣҫеқҮиЎЎеҢ–ж–№жі•жЈҖжөӢз»“жһңпјҡ
д»ҘдёҠжҳҜвҖңOpenCVеҰӮдҪ•е®һзҺ°дҪҺеҜ№жҜ”еәҰеӣҫеғҸи„ҸжұЎеҢәеҹҹжЈҖжөӢвҖқиҝҷзҜҮж–Үз« зҡ„жүҖжңүеҶ…е®№пјҢж„ҹи°ўеҗ„дҪҚзҡ„йҳ…иҜ»пјҒеёҢжңӣеҲҶдә«зҡ„еҶ…е®№еҜ№еӨ§е®¶жңүеё®еҠ©пјҢжӣҙеӨҡзӣёе…ізҹҘиҜҶпјҢж¬ўиҝҺе…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“пјҒ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ