您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章主要为大家展示了“如何使用OpenCV-Python实现识别答题卡判卷功能”,内容简而易懂,条理清晰,希望能够帮助大家解决疑惑,下面让小编带领大家一起研究并学习一下“如何使用OpenCV-Python实现识别答题卡判卷功能”这篇文章吧。
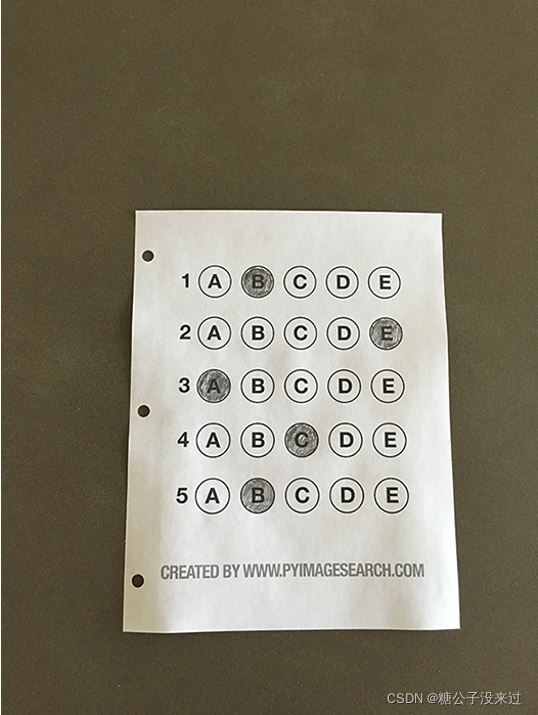
识别用相机拍下来的答题卡,并判断最终得分(假设正确答案是B, E, A, D, B)
轮廓识别——答题卡边缘识别
透视变换——提取答题卡主体
轮廓识别——识别出所有圆形选项,剔除无关轮廓
检测每一行选择的是哪一项,并将结果储存起来,记录正确的个数
计算最终得分并在图中标注
轮廓识别——答题卡边缘识别
输入图像
import cv2 as cv
import numpy as np
# 正确答案
right_key = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
# 输入图像
img = cv.imread('./images/test_01.jpg')
img_copy = img.copy()
img_gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cvshow('img-gray', img_gray)
# 图像预处理
# 高斯降噪
img_gaussian = cv.GaussianBlur(img_gray, (5, 5), 1)
cvshow('gaussianblur', img_gaussian)
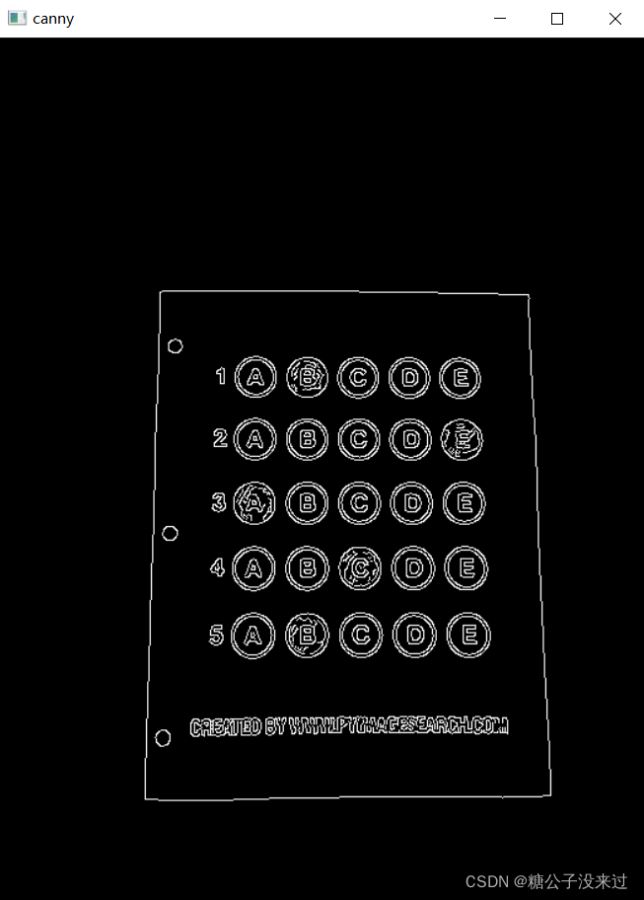
# canny边缘检测
img_canny = cv.Canny(img_gaussian, 80, 150)
cvshow('canny', img_canny) 
轮廓识别——答题卡边缘识别
# 轮廓识别——答题卡边缘识别
cnts, hierarchy = cv.findContours(img_canny, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
cv.drawContours(img_copy, cnts, -1, (0, 0, 255), 3)
cvshow('contours-show', img_copy)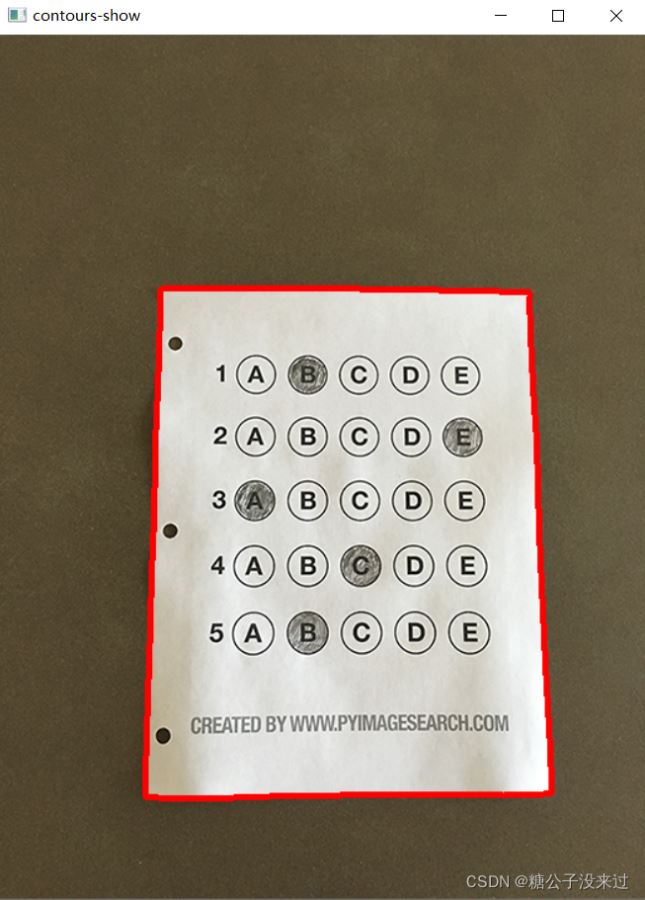
透视变换——提取答题卡主体
对每个轮廓进行拟合,将多边形轮廓变为四边形
docCnt = None # 确保检测到了 if len(cnts) > 0: # 根据轮廓大小进行排序 cnts = sorted(cnts, key=cv.contourArea, reverse=True) # 遍历每一个轮廓 for c in cnts: # 近似 peri = cv.arcLength(c, True) # arclength 计算一段曲线的长度或者闭合曲线的周长; # 第一个参数输入一个二维向量,第二个参数表示计算曲线是否闭合 approx = cv.approxPolyDP(c, 0.02 * peri, True) # 用一条顶点较少的曲线/多边形来近似曲线/多边形,以使它们之间的距离<=指定的精度; # c是需要近似的曲线,0.02*peri是精度的最大值,True表示曲线是闭合的 # 准备做透视变换 if len(approx) == 4: docCnt = approx break
透视变换——提取答题卡主体
# 透视变换——提取答题卡主体
docCnt = docCnt.reshape(4, 2)
warped = four_point_transform(img_gray, docCnt)
cvshow('warped', warped)def four_point_transform(img, four_points): rect = order_points(four_points) (tl, tr, br, bl) = rect # 计算输入的w和h的值 widthA = np.sqrt((tr[0] - tl[0]) ** 2 + (tr[1] - tl[1]) ** 2) widthB = np.sqrt((br[0] - bl[0]) ** 2 + (br[1] - bl[1]) ** 2) maxWidth = max(int(widthA), int(widthB)) heightA = np.sqrt((tl[0] - bl[0]) ** 2 + (tl[1] - bl[1]) ** 2) heightB = np.sqrt((tr[0] - br[0]) ** 2 + (tr[1] - br[1]) ** 2) maxHeight = max(int(heightA), int(heightB)) # 变换后对应的坐标位置 dst = np.array([ [0, 0], [maxWidth - 1, 0], [maxWidth - 1, maxHeight - 1], [0, maxHeight - 1]], dtype='float32') # 最主要的函数就是 cv2.getPerspectiveTransform(rect, dst) 和 cv2.warpPerspective(image, M, (maxWidth, maxHeight)) M = cv.getPerspectiveTransform(rect, dst) warped = cv.warpPerspective(img, M, (maxWidth, maxHeight)) return warped def order_points(points): res = np.zeros((4, 2), dtype='float32') # 按照从前往后0,1,2,3分别表示左上、右上、右下、左下的顺序将points中的数填入res中 # 将四个坐标x与y相加,和最大的那个是右下角的坐标,最小的那个是左上角的坐标 sum_hang = points.sum(axis=1) res[0] = points[np.argmin(sum_hang)] res[2] = points[np.argmax(sum_hang)] # 计算坐标x与y的离散插值np.diff() diff = np.diff(points, axis=1) res[1] = points[np.argmin(diff)] res[3] = points[np.argmax(diff)] # 返回result return res

轮廓识别——识别出选项
# 轮廓识别——识别出选项
thresh = cv.threshold(warped, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)[1]
cvshow('thresh', thresh)
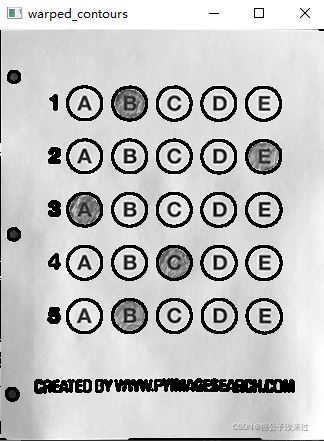
thresh_cnts, _ = cv.findContours(thresh, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
w_copy = warped.copy()
cv.drawContours(w_copy, thresh_cnts, -1, (0, 0, 255), 2)
cvshow('warped_contours', w_copy)
questionCnts = []
# 遍历,挑出选项的cnts
for c in thresh_cnts:
(x, y, w, h) = cv.boundingRect(c)
ar = w / float(h)
# 根据实际情况指定标准
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
questionCnts.append(c)
# 检查是否挑出了选项
w_copy2 = warped.copy()
cv.drawContours(w_copy2, questionCnts, -1, (0, 0, 255), 2)
cvshow('questionCnts', w_copy2)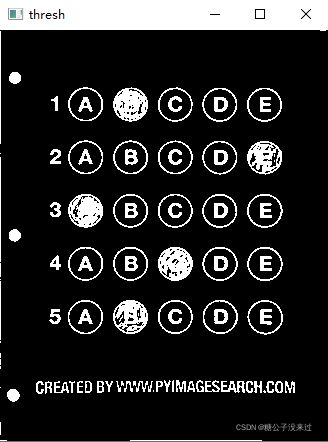
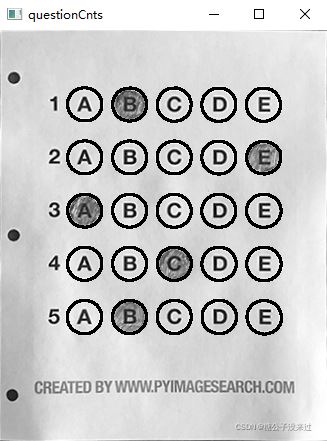
成功将无关轮廓剔除
检测每一行选择的是哪一项,并将结果储存起来,记录正确的个数
# 检测每一行选择的是哪一项,并将结果储存在元组bubble中,记录正确的个数correct
# 按照从上到下t2b对轮廓进行排序
questionCnts = sort_contours(questionCnts, method="t2b")[0]
correct = 0
# 每行有5个选项
for (i, q) in enumerate(np.arange(0, len(questionCnts), 5)):
# 排序
cnts = sort_contours(questionCnts[q:q+5])[0]
bubble = None
# 得到每一个选项的mask并填充,与正确答案进行按位与操作获得重合点数
for (j, c) in enumerate(cnts):
mask = np.zeros(thresh.shape, dtype='uint8')
cv.drawContours(mask, [c], -1, 255, -1)
# cvshow('mask', mask)
# 通过按位与操作得到thresh与mask重合部分的像素数量
bitand = cv.bitwise_and(thresh, thresh, mask=mask)
totalPixel = cv.countNonZero(bitand)
if bubble is None or bubble[0] < totalPixel:
bubble = (totalPixel, j)
k = bubble[1]
color = (0, 0, 255)
if k == right_key[i]:
correct += 1
color = (0, 255, 0)
# 绘图
cv.drawContours(warped, [cnts[right_key[i]]], -1, color, 3)
cvshow('final', warped)def sort_contours(contours, method="l2r"): # 用于给轮廓排序,l2r, r2l, t2b, b2t reverse = False i = 0 if method == "r2l" or method == "b2t": reverse = True if method == "t2b" or method == "b2t": i = 1 boundingBoxes = [cv.boundingRect(c) for c in contours] (contours, boundingBoxes) = zip(*sorted(zip(contours, boundingBoxes), key=lambda a: a[1][i], reverse=reverse)) return contours, boundingBoxes
用透过mask的像素的个数来判断考生选择的是哪个选项

计算最终得分并在图中标注
# 计算最终得分并在图中标注
score = (correct / 5.0) * 100
print(f"Score: {score}%")
cv.putText(warped, f"Score: {score}%", (10, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv.imshow("Original", img)
cv.imshow("Exam", warped)
cv.waitKey(0)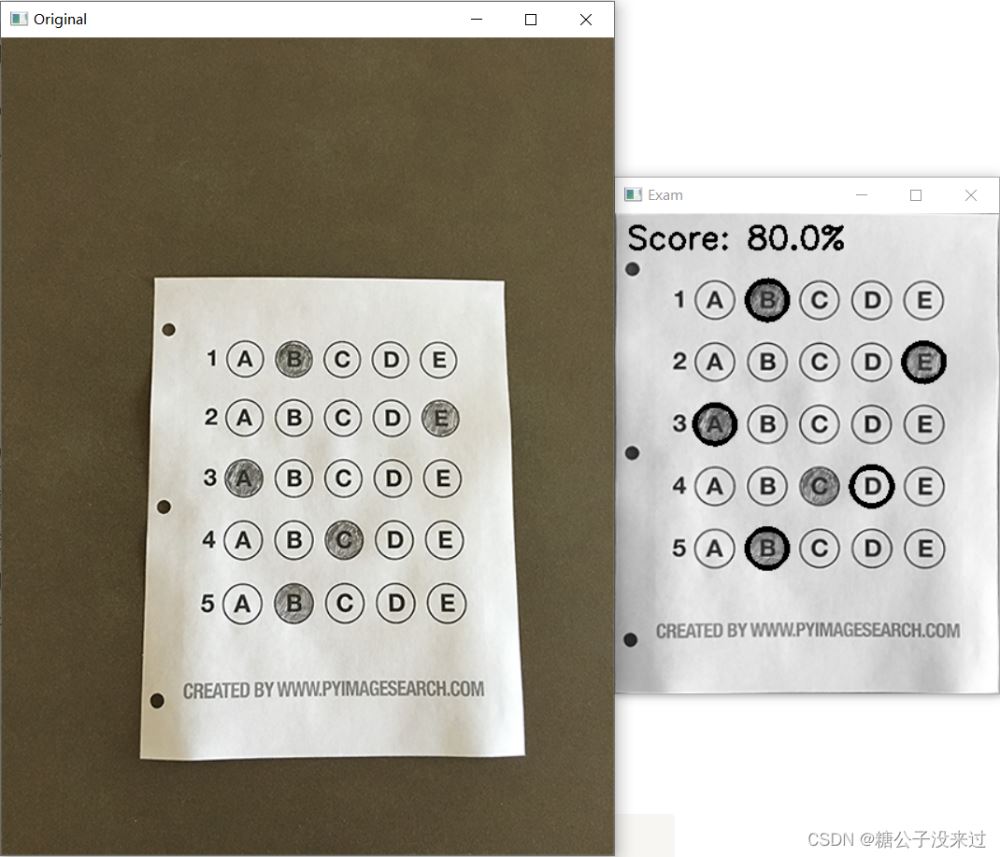
完整代码
import cv2 as cv
import numpy as np
def cvshow(name, img):
cv.imshow(name, img)
cv.waitKey(0)
cv.destroyAllWindows()
def four_point_transform(img, four_points):
rect = order_points(four_points)
(tl, tr, br, bl) = rect
# 计算输入的w和h的值
widthA = np.sqrt((tr[0] - tl[0]) ** 2 + (tr[1] - tl[1]) ** 2)
widthB = np.sqrt((br[0] - bl[0]) ** 2 + (br[1] - bl[1]) ** 2)
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt((tl[0] - bl[0]) ** 2 + (tl[1] - bl[1]) ** 2)
heightB = np.sqrt((tr[0] - br[0]) ** 2 + (tr[1] - br[1]) ** 2)
maxHeight = max(int(heightA), int(heightB))
# 变换后对应的坐标位置
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype='float32')
# 最主要的函数就是 cv2.getPerspectiveTransform(rect, dst) 和 cv2.warpPerspective(image, M, (maxWidth, maxHeight))
M = cv.getPerspectiveTransform(rect, dst)
warped = cv.warpPerspective(img, M, (maxWidth, maxHeight))
return warped
def order_points(points):
res = np.zeros((4, 2), dtype='float32')
# 按照从前往后0,1,2,3分别表示左上、右上、右下、左下的顺序将points中的数填入res中
# 将四个坐标x与y相加,和最大的那个是右下角的坐标,最小的那个是左上角的坐标
sum_hang = points.sum(axis=1)
res[0] = points[np.argmin(sum_hang)]
res[2] = points[np.argmax(sum_hang)]
# 计算坐标x与y的离散插值np.diff()
diff = np.diff(points, axis=1)
res[1] = points[np.argmin(diff)]
res[3] = points[np.argmax(diff)]
# 返回result
return res
def sort_contours(contours, method="l2r"):
# 用于给轮廓排序,l2r, r2l, t2b, b2t
reverse = False
i = 0
if method == "r2l" or method == "b2t":
reverse = True
if method == "t2b" or method == "b2t":
i = 1
boundingBoxes = [cv.boundingRect(c) for c in contours]
(contours, boundingBoxes) = zip(*sorted(zip(contours, boundingBoxes), key=lambda a: a[1][i], reverse=reverse))
return contours, boundingBoxes
# 正确答案
right_key = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
# 输入图像
img = cv.imread('./images/test_01.jpg')
img_copy = img.copy()
img_gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cvshow('img-gray', img_gray)
# 图像预处理
# 高斯降噪
img_gaussian = cv.GaussianBlur(img_gray, (5, 5), 1)
cvshow('gaussianblur', img_gaussian)
# canny边缘检测
img_canny = cv.Canny(img_gaussian, 80, 150)
cvshow('canny', img_canny)
# 轮廓识别——答题卡边缘识别
cnts, hierarchy = cv.findContours(img_canny, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
cv.drawContours(img_copy, cnts, -1, (0, 0, 255), 3)
cvshow('contours-show', img_copy)
docCnt = None
# 确保检测到了
if len(cnts) > 0:
# 根据轮廓大小进行排序
cnts = sorted(cnts, key=cv.contourArea, reverse=True)
# 遍历每一个轮廓
for c in cnts:
# 近似
peri = cv.arcLength(c, True) # arclength 计算一段曲线的长度或者闭合曲线的周长;
# 第一个参数输入一个二维向量,第二个参数表示计算曲线是否闭合
approx = cv.approxPolyDP(c, 0.02 * peri, True)
# 用一条顶点较少的曲线/多边形来近似曲线/多边形,以使它们之间的距离<=指定的精度;
# c是需要近似的曲线,0.02*peri是精度的最大值,True表示曲线是闭合的
# 准备做透视变换
if len(approx) == 4:
docCnt = approx
break
# 透视变换——提取答题卡主体
docCnt = docCnt.reshape(4, 2)
warped = four_point_transform(img_gray, docCnt)
cvshow('warped', warped)
# 轮廓识别——识别出选项
thresh = cv.threshold(warped, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)[1]
cvshow('thresh', thresh)
thresh_cnts, _ = cv.findContours(thresh, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
w_copy = warped.copy()
cv.drawContours(w_copy, thresh_cnts, -1, (0, 0, 255), 2)
cvshow('warped_contours', w_copy)
questionCnts = []
# 遍历,挑出选项的cnts
for c in thresh_cnts:
(x, y, w, h) = cv.boundingRect(c)
ar = w / float(h)
# 根据实际情况指定标准
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
questionCnts.append(c)
# 检查是否挑出了选项
w_copy2 = warped.copy()
cv.drawContours(w_copy2, questionCnts, -1, (0, 0, 255), 2)
cvshow('questionCnts', w_copy2)
# 检测每一行选择的是哪一项,并将结果储存在元组bubble中,记录正确的个数correct
# 按照从上到下t2b对轮廓进行排序
questionCnts = sort_contours(questionCnts, method="t2b")[0]
correct = 0
# 每行有5个选项
for (i, q) in enumerate(np.arange(0, len(questionCnts), 5)):
# 排序
cnts = sort_contours(questionCnts[q:q+5])[0]
bubble = None
# 得到每一个选项的mask并填充,与正确答案进行按位与操作获得重合点数
for (j, c) in enumerate(cnts):
mask = np.zeros(thresh.shape, dtype='uint8')
cv.drawContours(mask, [c], -1, 255, -1)
cvshow('mask', mask)
# 通过按位与操作得到thresh与mask重合部分的像素数量
bitand = cv.bitwise_and(thresh, thresh, mask=mask)
totalPixel = cv.countNonZero(bitand)
if bubble is None or bubble[0] < totalPixel:
bubble = (totalPixel, j)
k = bubble[1]
color = (0, 0, 255)
if k == right_key[i]:
correct += 1
color = (0, 255, 0)
# 绘图
cv.drawContours(warped, [cnts[right_key[i]]], -1, color, 3)
cvshow('final', warped)
# 计算最终得分并在图中标注
score = (correct / 5.0) * 100
print(f"Score: {score}%")
cv.putText(warped, f"Score: {score}%", (10, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv.imshow("Original", img)
cv.imshow("Exam", warped)
cv.waitKey(0)以上是“如何使用OpenCV-Python实现识别答题卡判卷功能”这篇文章的所有内容,感谢各位的阅读!相信大家都有了一定的了解,希望分享的内容对大家有所帮助,如果还想学习更多知识,欢迎关注亿速云行业资讯频道!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。