您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章主要为大家展示了“C++ OpenCV如何实现车道检测”,内容简而易懂,条理清晰,希望能够帮助大家解决疑惑,下面让小编带领大家一起研究并学习一下“C++ OpenCV如何实现车道检测”这篇文章吧。

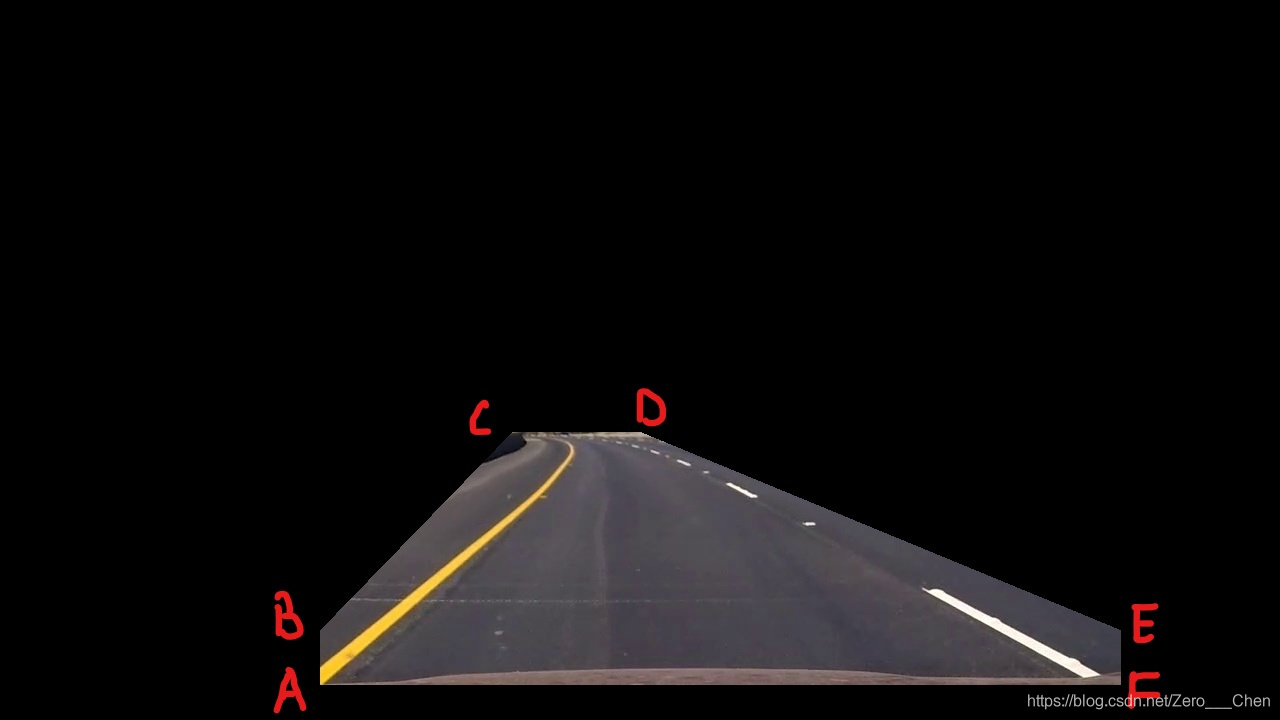
原图如图所示。
使用下面代码段获取ROI区域。该ROI区域点集根据图像特征自己设定。通过fillPoly填充ROI区域,最终通过copyTo在原图中扣出ROI。
void GetROI(Mat src, Mat &image)
{
Mat mask = Mat::zeros(src.size(), src.type());
int width = src.cols;
int height = src.rows;
//获取车道ROI区域,只对该部分进行处理
vector<Point>pts;
Point ptA((width / 8) * 2, (height / 20) * 19);
Point ptB((width / 8) * 2, (height / 8) * 7);
Point ptC((width / 10) * 4, (height / 5) * 3);
Point ptD((width / 10) * 5, (height / 5) * 3);
Point ptE((width / 8) * 7, (height / 8) * 7);
Point ptF((width / 8) * 7, (height / 20) * 19);
pts = { ptA ,ptB,ptC,ptD,ptE, ptF };
fillPoly(mask, pts, Scalar::all(255));
src.copyTo(image, mask);
}
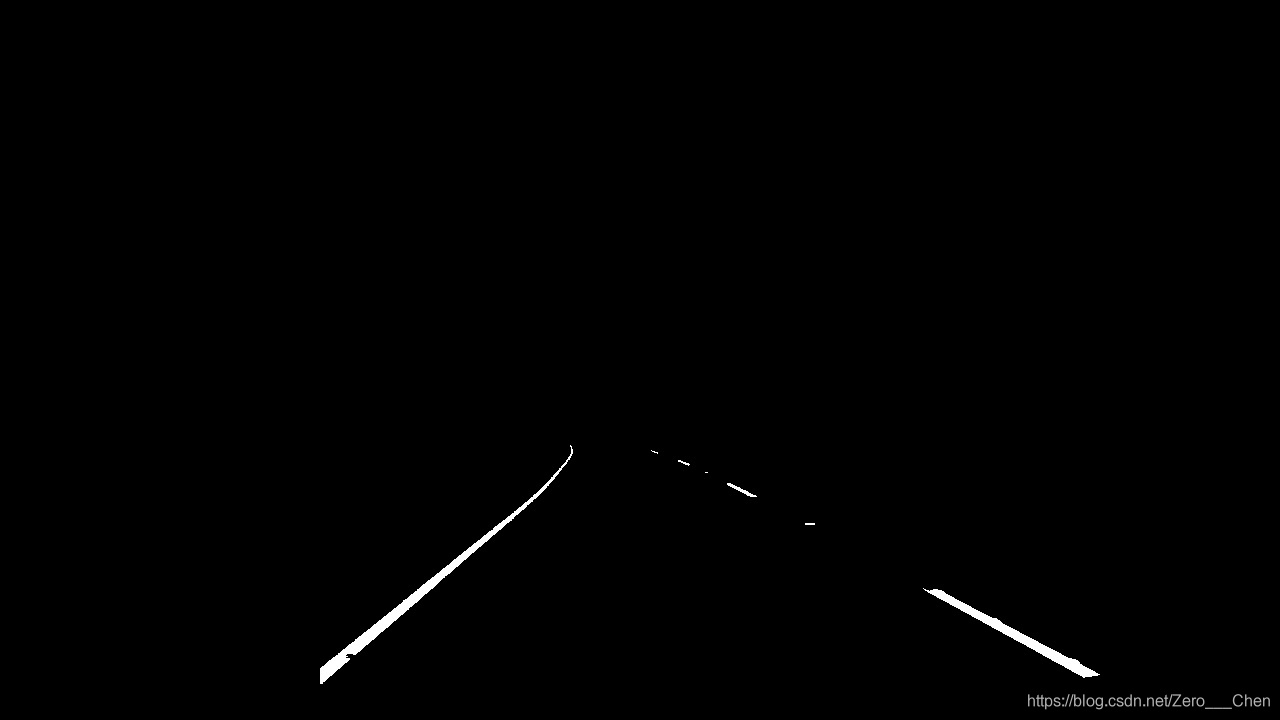
mask图像如图所示。有了mask图像,我们就可以更好的进行后续处理,以检测车道线。
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY);
Mat thresh;
threshold(gray, thresh, 180, 255, THRESH_BINARY);
imshow("thresh", thresh);经过灰度、阈值后的图像如下图所示。
我们将图像分为两半。左半边获取左侧车道轮廓点;右半边获取右侧车道轮廓点。
vector<Point>left_line;
vector<Point>right_line;
for (int i = 0; i < thresh.cols / 2; i++)
{
for (int j = 0; j < thresh.rows; j++)
{
if (thresh.at<uchar>(j, i) == 255)
{
left_line.push_back(Point(i, j));
}
}
}
for (int i = thresh.cols / 2; i < thresh.cols; i++)
{
for (int j = 0; j < thresh.rows; j++)
{
if (thresh.at<uchar>(j, i) == 255)
{
right_line.push_back(Point(i, j));
}
}
}我们将从left_line、right_line容器中各拿出首尾两个点作为车道线的起始点。
注意:这里要加一个if判断语句,否则当容器为空时(未检测到车道线),容器会溢出。
if (left_line.size() > 0 && right_line.size() > 0)
{
Point B_L = (left_line[0]);
Point T_L = (left_line[left_line.size() - 1]);
Point T_R = (right_line[0]);
Point B_R = (right_line[right_line.size() - 1]);
circle(src, B_L, 10, Scalar(0, 0, 255), -1);
circle(src, T_L, 10, Scalar(0, 255, 0), -1);
circle(src, T_R, 10, Scalar(255, 0, 0), -1);
circle(src, B_R, 10, Scalar(0, 255, 255), -1);
line(src, Point(B_L), Point(T_L), Scalar(0, 255, 0), 10);
line(src, Point(T_R), Point(B_R), Scalar(0, 255, 0), 10);
vector<Point>pts;
pts = { B_L ,T_L ,T_R ,B_R };
fillPoly(src, pts, Scalar(133, 230, 238));
}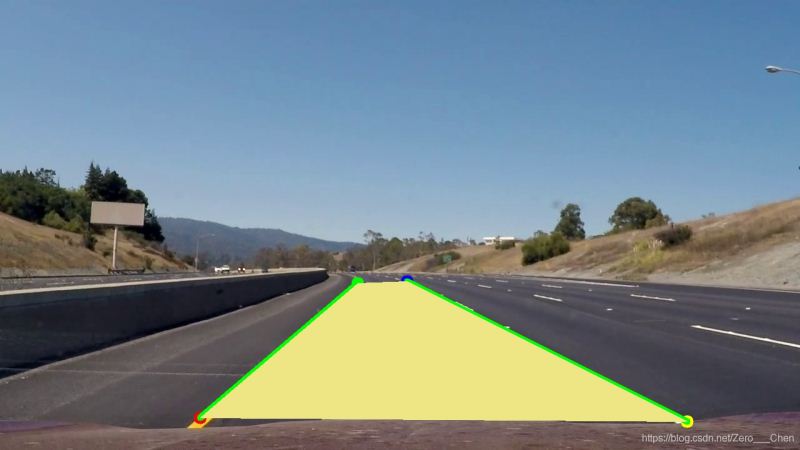
最终效果如图所示。
以上是“C++ OpenCV如何实现车道检测”这篇文章的所有内容,感谢各位的阅读!相信大家都有了一定的了解,希望分享的内容对大家有所帮助,如果还想学习更多知识,欢迎关注亿速云行业资讯频道!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。