您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章给大家分享的是有关Python如何实现驱动AI机器人的内容。小编觉得挺实用的,因此分享给大家做个参考,一起跟随小编过来看看吧。
1.如果尚未启动WSL-ROS环境,请运行Windows“开始”菜单中的WSL-ROS快捷方式。这将打开一个终端应用程序和一个Ubuntu终端实例。我们将这个终端实例称为终端1。
在终端中输入以下命令,在一个空世界中启动TurtleBot3华夫饼的模拟:
[TERMINAL 1] $ roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch
一个露台模拟窗口应该打开,在里面你会看到一个TurtleBot3华夫饼干
2.在新终端实例中,输入以下命令:
[TERMINAL 2] $ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
总结:
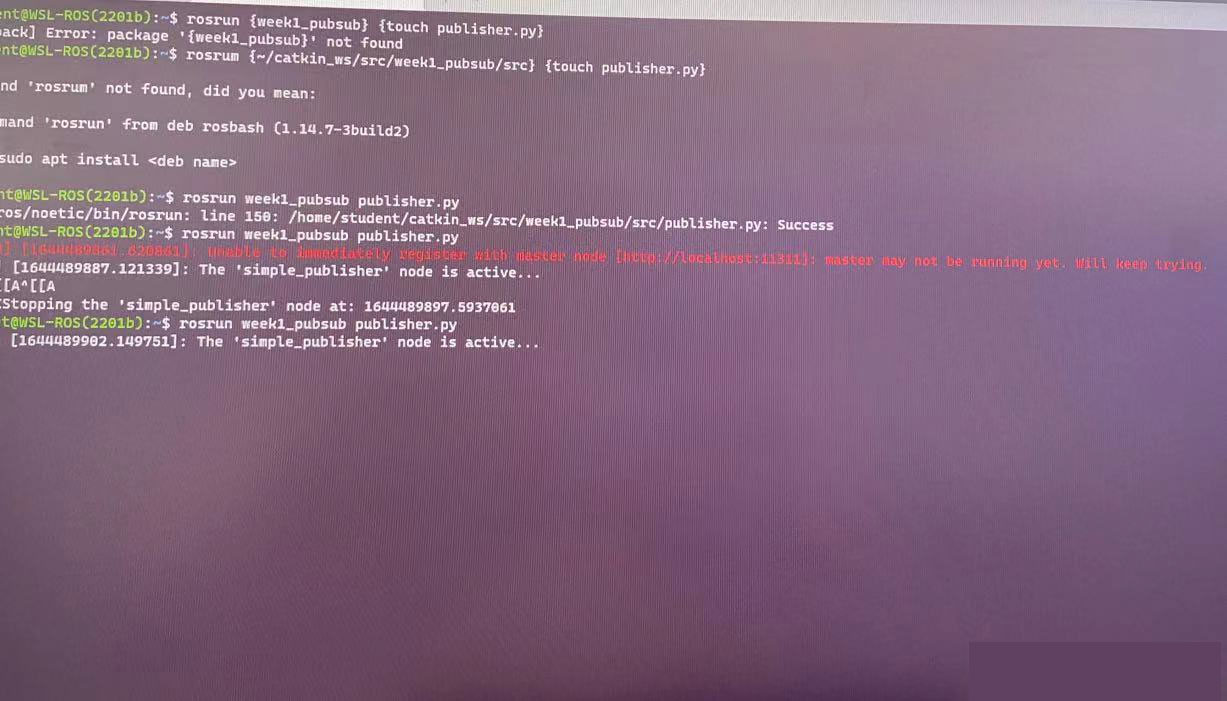
到目前为止,您已经使用roslaunch命令启动了两个单独的ROS应用程序。roslaunch是启动ROS项目的一种方式。正如您应该从上述示例中观察到的,我们以以下方式使用此命令:
roslaunch{package name}{launch file}该命令将两个参数作为输入:{package name}是包含我们想要执行的功能的ROS包的名称,{launch file}是该包中的一个文件,它确切地告诉ROS我们想要启动的包中的功能。
3.roscd是一个ROS命令,它允许我们导航到系统上安装的任何ROS包的目录,而无需我们事先知道该包的路径。
打开一个新的终端实例(terminal 3),并使用roscd命令导航到Linux文件系统上的turtlebot3_teleop包目录:
4.In TERMINAL 3 enter $ cd ~ to go back to your home directory
[TERMINAL 3] $ roscd turtlebot3_teleop [TERMINAL 3] $ pwd [TERMINAL 3] $ ls [TERMINAL 3] $ ls -F [TERMINAL 3] $ cat turtlebot3_teleop_key.launch
包的启动文件通常位于包目录中的启动文件夹中。您应该注意到上面ls命令的输出中有一个启动文件夹。
cd是一个Linux命令,允许我们更改终端当前所在的目录。用这个导航到turtlebot3_teleop package launch文件夹,然后再次使用ls查看其中的内容。在这个文件夹中,你会看到turtlebot3_teleop_钥匙。
cat是一个Linux命令,我们可以使用它在终端中显示文件的内容。
pkg:包含我们想要启动的功能的ROS包的名称。
type:我们希望在该包中执行的脚本(即ROS节点)的全名(包括文件扩展名,如果有)。
名称:我们想给ROS节点一个描述性名称,用于在ROS网络上注册。
输出:节点的任何输出将被打印的位置(输出将被打印到终端窗口的屏幕,或输出将被打印到日志文件的日志)。
ROS节点是执行特定机器人任务和操作的可执行程序,如我们在上述示例中看到的远程(或“远程操作”)控制。
5.使用以下命令查看哪些节点当前处于活动状态:
[TERMINAL 3] $ rosnode list
我们可以通过使用rqt_图形包中的rqt_图形节点来可视化活动节点之间的连接。我们可以使用rosrun直接启动此节点(您可能会收到一些错误消息,但不要担心):
[TERMINAL 3] $ rosrun rqt_graph rqt_graph
6.探索ROS主题和信息
通过使用rostopic ROS命令,我们可以了解关于/cmd_-vel主题的更多信息。
在新的终端实例(终端4)中,键入以下内容:
[TERMINAL 4] $ rostopic info /cmd_vel
内容的输出:
Type: geometry_msgs/Twist Publishers: * /turtlebot3_teleop_keyboard (http://localhost:#####/) Subscribers: * /gazebo (http://localhost:#####/)
[TERMINAL 4] $ rosmsg info geometry_msgs/Twist
要完成此操作,请在仍在运行的任何进程(终端1、2和3)中输入Ctrl+C,关闭所有活动的终端进程。因此,相关的Gazebo和rqt_图形窗口也应关闭。
一两分钟后,您将用Python创建一些简单的发布者和订阅者节点,并在它们之间发送消息。正如我们之前了解到的,ROS应用程序应该包含在包中,因此我们需要创建一个包,以便开始创建我们自己的ROS节点。
ROS提供了一个工具来创建一个新的ROS包,并确保所有基本元素都存在:catkin_create_pkg。
当我们创建和使用自己的ROS包时,在特定的文件系统位置工作非常重要,这样ROS就可以适当地访问和构建所有内容。这些空间被称为“Catkin工作空间”,其中一个已经在WSL-ROS环境中创建:称为Catkin_ws。
#!/usr/bin/env python3
# A simple ROS publisher node in Python
import rospy
from std_msgs.msg import String
class Publisher():
def __init__(self):
self.node_name = "simple_publisher"
topic_name = "chatter"
self.pub = rospy.Publisher(topic_name, String, queue_size=10)
rospy.init_node(self.node_name, anonymous=True)
self.rate = rospy.Rate(10) # hz
self.ctrl_c = False
rospy.on_shutdown(self.shutdownhook)
rospy.loginfo(f"The '{self.node_name}' node is active...")
def shutdownhook(self):
print(f"Stopping the '{self.node_name}' node at: {rospy.get_time()}")
self.ctrl_c = True
def main_loop(self):
while not self.ctrl_c:
publisher_message = f"rospy time is: {rospy.get_time()}"
self.pub.publish(publisher_message)
self.rate.sleep()
if __name__ == '__main__':
publisher_instance = Publisher()
try:
publisher_instance.main_loop()
except rospy.ROSInterruptException:
pass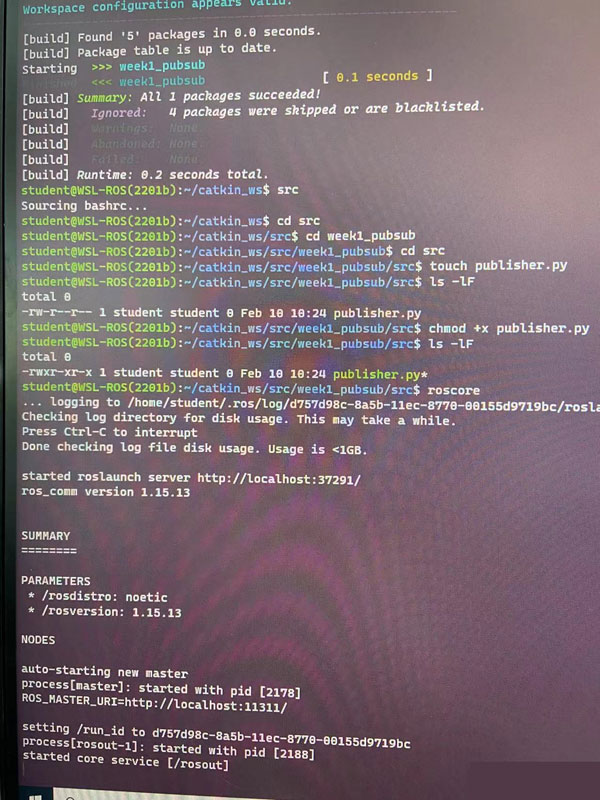
感谢各位的阅读!关于“Python如何实现驱动AI机器人”这篇文章就分享到这里了,希望以上内容可以对大家有一定的帮助,让大家可以学到更多知识,如果觉得文章不错,可以把它分享出去让更多的人看到吧!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。