жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
жң¬ж–Үе°Ҹзј–дёәеӨ§е®¶иҜҰз»Ҷд»Ӣз»ҚвҖңFreeRTOSе®һж—¶ж“ҚдҪңзі»з»ҹзҡ„д»»еҠЎеә”з”ЁеҮҪж•°жҳҜд»Җд№ҲвҖқпјҢеҶ…е®№иҜҰз»ҶпјҢжӯҘйӘӨжё…жҷ°пјҢз»ҶиҠӮеӨ„зҗҶеҰҘеҪ“пјҢеёҢжңӣиҝҷзҜҮвҖңFreeRTOSе®һж—¶ж“ҚдҪңзі»з»ҹзҡ„д»»еҠЎеә”з”ЁеҮҪж•°жҳҜд»Җд№ҲвҖқж–Үз« иғҪеё®еҠ©еӨ§е®¶и§ЈеҶіз–‘жғ‘пјҢдёӢйқўи·ҹзқҖе°Ҹзј–зҡ„жҖқи·Ҝж…ўж…ўж·ұе…ҘпјҢдёҖиө·жқҘеӯҰд№ ж–°зҹҘиҜҶеҗ§гҖӮ
UBaseType_t uxTaskGetSystemState( TaskStatus_t * constpxTaskStatusArray, const UBaseType_tuxArraySize, unsigned long * constpulTotalRunTime );
иҜҘеҮҪж•°еҗ‘TaskStatus_tз»“жһ„дҪ“еЎ«е……зӣёе…ідҝЎжҒҜпјҢзі»з»ҹдёӯжҜҸдёҖдёӘд»»еҠЎзҡ„дҝЎжҒҜйғҪеҸҜд»ҘеЎ«е……еҲ°TaskStatus_tз»“жһ„дҪ“ж•°з»„дёӯпјҢж•°з»„еӨ§е°Ҹз”ұuxArraySizeжҢҮе®ҡгҖӮз»“жһ„дҪ“TaskStatus_tе®ҡд№үеҰӮдёӢпјҡ
typedef struct xTASK_STATUS
{
/* д»»еҠЎеҸҘжҹ„*/
TaskHandle_t xHandle;
/* жҢҮй’ҲпјҢжҢҮеҗ‘д»»еҠЎеҗҚ*/
const signed char *pcTaskName;
/*д»»еҠЎIDпјҢжҳҜдёҖдёӘзӢ¬дёҖж— дәҢзҡ„ж•°еӯ—*/
UBaseType_t xTaskNumber;
/*еЎ«е……з»“жһ„дҪ“ж—¶пјҢд»»еҠЎеҪ“еүҚзҡ„зҠ¶жҖҒпјҲиҝҗиЎҢгҖҒе°ұз»ӘгҖҒжҢӮиө·зӯүзӯүпјү*/
eTaskState eCurrentState;
/*еЎ«е……з»“жһ„дҪ“ж—¶пјҢд»»еҠЎиҝҗиЎҢпјҲжҲ–继жүҝпјүзҡ„дјҳе…Ҳзә§гҖӮ*/
UBaseType_t uxCurrentPriority;
/* еҪ“д»»еҠЎеӣ 继жүҝиҖҢж”№еҸҳдјҳе…Ҳзә§ж—¶пјҢиҜҘеҸҳйҮҸдҝқеӯҳд»»еҠЎжңҖеҲқзҡ„дјҳе…Ҳзә§гҖӮд»…еҪ“configUSE_MUTEXESе®ҡд№үдёә1жңүж•ҲгҖӮ*/
UBaseType_t uxBasePriority;
/* еҲҶй…Қз»ҷд»»еҠЎзҡ„жҖ»иҝҗиЎҢж—¶й—ҙгҖӮд»…еҪ“е®ҸconfigGENERATE_RUN_TIME_STATSдёә1ж—¶жңүж•ҲгҖӮ*/
unsigned long ulRunTimeCounter;
/* д»Һд»»еҠЎеҲӣе»әиө·пјҢе Ҷж Ҳеү©дҪҷзҡ„жңҖе°Ҹж•°йҮҸпјҢиҝҷдёӘеҖји¶ҠжҺҘиҝ‘0пјҢе Ҷж ҲжәўеҮәзҡ„еҸҜиғҪи¶ҠеӨ§гҖӮ */
unsigned short usStackHighWaterMark;
}TaskStatus_t;жіЁж„ҸпјҢиҝҷдёӘеҮҪж•°д»…з”ЁжқҘи°ғиҜ•з”ЁпјҢи°ғз”ЁжӯӨеҮҪж•°дјҡжҢӮиө·жүҖжңүд»»еҠЎпјҢзӣҙеҲ°еҮҪж•°жңҖеҗҺжүҚжҒўеӨҚжҢӮиө·зҡ„д»»еҠЎпјҢеӣ жӯӨд»»еҠЎеҸҜиғҪиў«жҢӮиө·еҫҲй•ҝж—¶й—ҙгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸconfigUSE_TRACE_FACILITYеҝ…йЎ»и®ҫзҪ®дёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
pxTaskStatusArrayпјҡжҢҮеҗ‘TaskStatus_tзұ»еһӢзҡ„з»“жһ„дҪ“ж•°з»„гҖӮиҝҷдёӘж•°з»„иҮіе°‘иҰҒеҢ…еҗ«1дёӘе…ғзҙ гҖӮRTOSжҺ§еҲ¶зҡ„д»»еҠЎж•°йҮҸеҸҜд»ҘдҪҝз”ЁAPIеҮҪж•°uxTaskGetNumberOfTasks()иҺ·еҸ–гҖӮ
uxArraySizeпјҡеҸӮж•°pxTaskStatusArrayжҢҮеҗ‘зҡ„ж•°з»„еӨ§е°ҸпјҢд№ҹе°ұжҳҜиҜҘж•°з»„зҡ„зҙўеј•ж•°зӣ®гҖӮ
pulTotalRunTimeпјҡеҰӮжһңеңЁж–Ү件FreeRTOSConfig.hдёӯи®ҫзҪ®е®ҸconfigGENERATE_RUN_TIME_STATSдёә1пјҢеҲҷиҜҘеҮҪж•°е°ҶжҖ»иҝҗиЎҢж—¶й—ҙеҶҷе…Ҙ*pulTotalRunTimeдёӯгҖӮpulTotalRunTimeеҸҜд»Ҙи®ҫзҪ®дёәNULLпјҢиЎЁзӨәеҝҪз•ҘжҖ»иҝҗиЎҢж—¶й—ҙгҖӮ
иў«еЎ«е……зҡ„TaskStatus_tз»“жһ„дҪ“ж•°йҮҸгҖӮиҝҷдёӘеҖјеә”иҜҘзӯүдәҺйҖҡиҝҮи°ғз”ЁAPIеҮҪж•°uxTaskGetNumberOfTasks()иҝ”еӣһзҡ„еҖјпјҢдҪҶеҰӮжһңдј йҖ’з»ҷuxArraySizeеҸӮж•°зҡ„еҖјеӨӘе°ҸпјҢеҲҷиҝ”еӣһ0гҖӮ
/*жң¬дҫӢжј”зӨәеҰӮжҳҜдҪҝз”ЁuxTaskGetSystemState()еҮҪж•°жқҘиҺ·еҸ–иҝҗиЎҢж—¶й—ҙдҝЎжҒҜпјҢ并е°Ҷе…¶иҪ¬еҢ–дёәзЁӢеәҸе‘ҳжӣҙжҳ“иҜҶеҲ«зҡ„еӯ—з¬Ұж јејҸпјҢиҝҷдәӣиҪ¬еҢ–еҗҺзҡ„еӯ—з¬ҰдҝқеӯҳеҲ°pcWriteBufferдёӯгҖӮ*/
void vTaskGetRunTimeStats(signed char *pcWriteBuffer )
{
TaskStatus_t*pxTaskStatusArray;
volatileUBaseType_t uxArraySize, x;
unsignedlong ulTotalRunTime, ulStatsAsPercentage;
/* йҳІеҫЎжҖ§д»Јз ҒпјҢзЎ®дҝқеӯ—з¬ҰдёІжңүеҗҲзҗҶзҡ„з»“жқҹ*/
*pcWriteBuffer = 0x00;
/* иҺ·еҸ–д»»еҠЎжҖ»ж•°зӣ®*/
uxArraySize = uxTaskGetNumberOfTasks ();
/*дёәжҜҸдёӘд»»еҠЎзҡ„TaskStatus_tз»“жһ„дҪ“еҲҶй…ҚеҶ…еӯҳпјҢд№ҹеҸҜд»ҘйқҷжҖҒзҡ„еҲҶй…ҚдёҖдёӘи¶іеӨҹеӨ§зҡ„ж•°з»„ */
pxTaskStatusArray = pvPortMalloc( uxArraySize * sizeof( TaskStatus_t ));
if(pxTaskStatusArray != NULL )
{
/*иҺ·еҸ–жҜҸдёӘд»»еҠЎзҡ„зҠ¶жҖҒдҝЎжҒҜ */
uxArraySize = uxTaskGetSystemState( pxTaskStatusArray, uxArraySize,&ulTotalRunTime );
/* зҷҫеҲҶжҜ”и®Ўз®— */
ulTotalRunTime /= 100UL;
/* йҒҝе…ҚйҷӨйӣ¶й”ҷиҜҜ */
if(ulTotalRunTime > 0 )
{
/* е°ҶиҺ·еҫ—зҡ„жҜҸдёҖдёӘд»»еҠЎзҠ¶жҖҒдҝЎжҒҜйғЁеҲҶзҡ„иҪ¬еҢ–дёәзЁӢеәҸе‘ҳе®№жҳ“иҜҶеҲ«зҡ„еӯ—з¬ҰдёІж јејҸ*/
for( x = 0; x < uxArraySize; x++ )
{
/* и®Ўз®—д»»еҠЎиҝҗиЎҢж—¶й—ҙдёҺжҖ»иҝҗиЎҢж—¶й—ҙзҡ„зҷҫеҲҶжҜ”гҖӮ*/
ulStatsAsPercentage = pxTaskStatusArray[ x ].ulRunTimeCounter /ulTotalRunTime;
if( ulStatsAsPercentage > 0UL )
{
sprintf( pcWriteBuffer, "%s\t\t%lu\t\t%lu%%\r\n",
pxTaskStatusArray[ x ].pcTaskName,
pxTaskStatusArray[ x ].ulRunTimeCounter,
ulStatsAsPercentage );
}
else
{
/* д»»еҠЎиҝҗиЎҢж—¶й—ҙдёҚи¶іжҖ»иҝҗиЎҢж—¶й—ҙзҡ„1%*/
sprintf( pcWriteBuffer, "%s\t\t%lu\t\t<1%%\r\n",
pxTaskStatusArray[ x ].pcTaskName,
pxTaskStatusArray[x ].ulRunTimeCounter );
}
pcWriteBuffer += strlen( ( char * ) pcWriteBuffer );
}
}
/* йҮҠж”ҫд№ӢеүҚз”іиҜ·зҡ„еҶ…еӯҳ*/
vPortFree( pxTaskStatusArray );
}
}TaskHandle_t xTaskGetCurrentTaskHandle(void );
еңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸINCLUDE_xTaskGetCurrentTaskHandleеҝ…йЎ»и®ҫзҪ®дёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
иҝ”еӣһеҪ“еүҚд»»еҠЎпјҲи°ғз”ЁиҜҘеҮҪж•°зҡ„д»»еҠЎпјүзҡ„еҸҘжҹ„гҖӮ
TaskHandle_t xTaskGetIdleTaskHandle(void );
еңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸINCLUDE_xTaskGetIdleTaskHandleеҝ…йЎ»и®ҫзҪ®дёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
иҝ”еӣһз©әй—Ід»»еҠЎеҸҘжҹ„гҖӮз©әй—Ід»»еҠЎеңЁRTOSи°ғеәҰеҷЁеҗҜеҠЁж—¶иҮӘеҠЁеҲӣе»әгҖӮ
UBaseType_t uxTaskGetStackHighWaterMark( TaskHandle_t xTask );
д»»еҠЎзҡ„е Ҷж Ҳз©әй—ҙдјҡйҡҸзқҖд»»еҠЎжү§иЎҢд»ҘеҸҠдёӯж–ӯеӨ„зҗҶиҖҢеўһй•ҝжҲ–зј©е°ҸгҖӮиҜҘеҮҪж•°еҸҜд»Ҙиҝ”еӣһд»»еҠЎеҗҜеҠЁеҗҺзҡ„жңҖе°Ҹеү©дҪҷе Ҷж Ҳз©әй—ҙгҖӮжҚўеҸҘиҜқиҜҙпјҢеҸҜд»Ҙй—ҙжҺҘдј°з®—еҮәдёҖдёӘд»»еҠЎжңҖеӨҡйңҖиҰҒеӨҡе°‘е Ҷж Ҳз©әй—ҙгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸINCLUDE_uxTaskGetStackHighWaterMark еҝ…йЎ»и®ҫзҪ®жҲҗ1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
xTaskпјҡд»»еҠЎеҸҘжҹ„гҖӮNULLиЎЁзӨәжҹҘзңӢеҪ“еүҚд»»еҠЎзҡ„е Ҷж ҲдҪҝз”Ёжғ…еҶөгҖӮ
иҝ”еӣһжңҖе°Ҹеү©дҪҷе Ҷж Ҳз©әй—ҙпјҢд»Ҙеӯ—дёәеҚ•дҪҚгҖӮжҜ”еҰӮдёҖдёӘ32дёәжһ¶жһ„еӨ„зҗҶеҷЁпјҢиҝ”еӣһеҖјдёә1иЎЁзӨәжңү4еӯ—иҠӮе Ҷж Ҳз©әй—ҙжІЎжңүдҪҝз”ЁиҝҮгҖӮеҰӮжһңиҝ”еӣһеҖјдёә0пјҢеҲҷд»»еҠЎеҫҲеҸҜиғҪе·Із»ҸеҸ‘з”ҹдәҶе Ҷж ҲжәўеҮәгҖӮ
void vTask1( void * pvParameters )
{
UBaseType_tuxHighWaterMark;
/* е…ҘеҸЈеӨ„жЈҖжөӢдёҖж¬Ў */
uxHighWaterMark =uxTaskGetStackHighWaterMark( NULL );
for( ;; )
{
/* жӯЈеёёи°ғз”ЁеҮҪж•° */
vTaskDelay( 1000 );
/* жөӢйҮҸе Ҷж ҲдҪҝз”Ёжғ…еҶө */
uxHighWaterMark =uxTaskGetStackHighWaterMark( NULL );
}
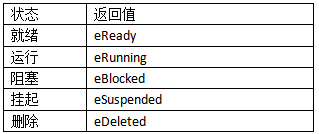
}eTaskState eTaskGetState( TaskHandle_txTask );
иҝ”еӣһдёҖдёӘжһҡдёҫзұ»еһӢзҡ„д»»еҠЎзҠ¶жҖҒеҖјгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸINCLUDE_eTaskGetStateеҝ…йЎ»и®ҫзҪ®дёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
xTaskпјҡд»»еҠЎеҸҘжҹ„
дёӢиЎЁеҲ—еҮәиҝ”еӣһеҖје’ҢеҜ№еә”зҡ„д»»еҠЎзҠ¶жҖҒгҖӮ
char * pcTaskGetTaskName( TaskHandle_txTaskToQuery );
иҺ·еҸ–д»»еҠЎзҡ„жҸҸиҝ°еҶ…е®№пјҢеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸINCLUDE_pcTaskGetTaskNameеҝ…йЎ»и®ҫзҪ®жҲҗ1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
xTaskToQueryпјҡд»»еҠЎзҡ„еҸҘжҹ„гҖӮNULLиЎЁзӨәиҺ·еҸ–еҪ“еүҚд»»еҠЎзҡ„жҸҸиҝ°еҶ…е®№жҢҮй’ҲгҖӮ
дёҖдёӘжҢҮй’ҲпјҢжҢҮеҗ‘д»»еҠЎжҸҸиҝ°еӯ—з¬ҰдёІгҖӮ
volatile TickType_t xTaskGetTickCount(void );
иҝҷдёӘеҮҪж•°дёҚиғҪеңЁISRдёӯи°ғз”ЁгҖӮеңЁISRдёӯз”ЁxTaskGetTickCountFromISR()пјҢеҺҹеһӢдёәvolatileTickType_t xTaskGetTickCountFromISR( void )гҖӮ
иҝ”еӣһд»ҺvTaskStartSchedulerеҮҪж•°и°ғз”ЁеҗҺзҡ„зі»з»ҹж—¶й’ҹиҠӮжӢҚж¬Ўж•°гҖӮ
BaseType_t xTaskGetSchedulerState( void);
иҺ·еҸ–и°ғеәҰеҷЁеҪ“еүҚзҠ¶жҖҒгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸINCLUDE_xTaskGetSchedulerStateжҲ–configUSE_TIMERSеҝ…йЎ»е®ҡд№үдёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
&&&иҝ”еӣһеҖјжҳҜд»ҘдёӢеёёйҮҸд№ӢдёҖпјҲе®ҡд№үеңЁtask.hпјүпјҡtaskSCHEDULER_NOT_STARTEDпјҲжңӘеҗҜеҠЁпјүгҖҒtaskSCHEDULER_RUNNINGпјҲжӯЈеёёиҝҗиЎҢпјүгҖҒtaskSCHEDULER_SUSPENDEDпјҲжҢӮиө·пјүгҖӮ
UBaseType_t uxTaskGetNumberOfTasks(void );
&&&иҺ·еҸ–RTOSеҶ…ж ёеҪ“еүҚз®ЎзҗҶзҡ„д»»еҠЎжҖ»ж•°гҖӮеҢ…еҗ«жүҖжңүе°ұз»ӘгҖҒйҳ»еЎһе’ҢжҢӮиө·зҠ¶жҖҒзҡ„д»»еҠЎгҖӮеҜ№дәҺдёҖдёӘеҲ йҷӨзҡ„д»»еҠЎпјҢеҰӮжһңе®ғзҡ„е Ҷж Ҳз©әй—ҙиҝҳжІЎжңүиў«з©әй—Ід»»еҠЎйҮҠж”ҫжҺүпјҢеҲҷиҝҷдёӘиў«еҲ йҷӨзҡ„д»»еҠЎд№ҹеҗ«еңЁи®Ўж•°еҖјдёӯгҖӮ
&&&иҝ”еӣһRTOSеҶ…ж ёеҪ“еүҚз®ЎзҗҶзҡ„д»»еҠЎжҖ»ж•°гҖӮ
void vTaskList( char *pcWriteBuffer );
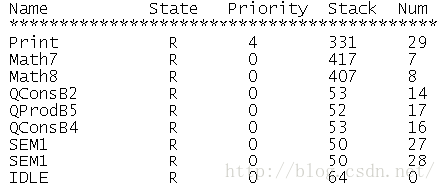
&&&е°ҶжҜҸдёӘд»»еҠЎзҡ„зҠ¶жҖҒгҖҒе Ҷж ҲдҪҝз”Ёжғ…еҶөзӯүд»Ҙеӯ—з¬Ұзҡ„еҪўејҸдҝқеӯҳеҲ°еҸӮж•°pcWriteBufferжҢҮеҗ‘зҡ„еҢәеҹҹгҖӮvTaskList()еҮҪж•°и°ғз”ЁusTaskGetSystemState()еҮҪж•°пјҢ然еҗҺе°Ҷеҫ—еҲ°зҡ„дҝЎжҒҜж јејҸеҢ–дёәзЁӢеәҸе‘ҳжҳ“иҜ»зҡ„еӯ—з¬ҰеҪўејҸгҖӮиҫ“еҮәзҡ„еҶ…е®№дҫӢеӯҗеҰӮдёӢеӣҫжүҖзӨәпјҢеӣҫдёӯStateдёҖж ҸдёӯпјҢBиЎЁзӨәйҳ»еЎһгҖҒRиЎЁзӨәе°ұз»ӘгҖҒDиЎЁзӨәеҲ йҷӨпјҲзӯүеҫ…жё…йҷӨеҶ…еӯҳпјүгҖҒSиЎЁзӨәжҢӮиө·жҲ–йҳ»еЎһгҖӮ
&&&жіЁж„ҸпјҢи°ғз”ЁиҝҷдёӘеҮҪж•°дјҡжҢӮиө·жүҖжңүд»»еҠЎпјҢиҝҷдёҖиҝҮзЁӢеҸҜиғҪжҢҒз»ӯиҫғй•ҝж—¶й—ҙпјҢеӣ жӯӨжң¬еҮҪж•°д»…еңЁи°ғиҜ•ж—¶дҪҝз”ЁгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸconfigUSE_TRACE_FACILITYе’ҢconfigUSE_STATS_FORMATTING_FUNCTIONSеҝ…йЎ»е®ҡд№үдёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
pcWriteBufferпјҡд»»еҠЎзҡ„дҝЎжҒҜдјҡеҶҷе…ҘиҝҷдёӘзј“еҶІеҢәпјҢдёәASCIIиЎЁеҚ•еҪўејҸгҖӮиҝҷдёӘзј“еҶІеҢәиҰҒи¶іеӨҹеӨ§пјҢд»Ҙе®№зәіз”ҹжҲҗзҡ„жҠҘе‘ҠпјҢжҜҸдёӘд»»еҠЎеӨ§зәҰйңҖиҰҒ40дёӘеӯ—иҠӮгҖӮ
void vTaskGetRunTimeStats( char*pcWriteBuffer );
иҝҷдёӘеҮҪж•°з”ЁдәҺз»ҹи®ЎжҜҸдёӘд»»еҠЎзҡ„иҝҗиЎҢж—¶й—ҙгҖӮиҰҒдҪҝз”ЁиҝҷдёӘеҮҪж•°еҝ…йЎ»ж»Ўи¶ідёҖдәӣжқЎд»¶пјҢйӮЈе°ұжҳҜеҝ…йЎ»жңүдёҖдёӘз”ЁдәҺж—¶й—ҙз»ҹи®Ўзҡ„е®ҡж—¶еҷЁжҲ–и®Ўж•°еҷЁпјҢиҝҷдёӘе®ҡж—¶еҷЁжҲ–и®Ўж•°еҷЁзҡ„зІҫеәҰиҰҒиҮіе°‘еӨ§дәҺ10еҖҚзҡ„зі»з»ҹиҠӮжӢҚе‘ЁжңҹгҖӮиҝҷдёӘе®ҡж—¶еҷЁжҲ–и®Ўж•°еҷЁзҡ„й…ҚзҪ®д»ҘеҸҠиҺ·еҸ–е®ҡж—¶ж—¶й—ҙжҳҜз”ұдёӨдёӘе®Ҹе®ҡд№үе®һзҺ°зҡ„пјҢиҝҷдёӨдёӘе®ҸдёҖиҲ¬еңЁж–Ү件FreeRTOSConfig.hдёӯе®ҡд№үгҖӮй…ҚзҪ®е®ҡж—¶еҷЁжҲ–и®Ўж•°еҷЁзҡ„е®ҸдёәportCONFIGURE_TIMER_FOR_RUN_TIME_STATS()пјҢиҺ·еҸ–е®ҡж—¶ж—¶й—ҙзҡ„е®ҸдёәportGET_RUN_TIME_COUNTER_VALUEгҖӮе®һзҺ°дәҶиҝҷдёӨдёӘе®Ҹе®ҡд№үеҗҺпјҢиҝҳеҝ…йЎ»еңЁж–Ү件FreeRTOSConfig.hдёӯе°Ҷе®ҸconfigGENERATE_RUN_TIME_STATSе’ҢconfigUSE_STATS_FORMATTING_FUNCTIONSи®ҫзҪ®дёә1пјҢжӯӨAPIеҮҪж•°жүҚжңүж•ҲгҖӮ
&&&иҝҷдёӘAPIеҮҪж•°и°ғз”ЁusTaskGetSystemState()еҮҪж•°иҺ·еҸ–жҜҸдёӘд»»еҠЎзҡ„зҠ¶жҖҒдҝЎжҒҜпјҢ并жҠҠе…¶дёӯзҡ„иҝҗиЎҢж—¶й—ҙж јејҸеҢ–дёәзЁӢеәҸе‘ҳжҳ“иҜ»зҡ„еӯ—з¬ҰеҪўејҸпјҢ并е°ҶиҝҷдәӣдҝЎжҒҜдҝқеӯҳеҲ°еҸӮж•°pcWriteBufferжҢҮеҗ‘зҡ„еҢәеҹҹгҖӮ
&&&жіЁж„ҸпјҢи°ғз”ЁиҝҷдёӘеҮҪж•°дјҡжҢӮиө·жүҖжңүд»»еҠЎпјҢиҝҷдёҖиҝҮзЁӢеҸҜиғҪжҢҒз»ӯиҫғй•ҝж—¶й—ҙпјҢеӣ жӯӨжң¬еҮҪж•°д»…еңЁи°ғиҜ•ж—¶дҪҝз”ЁгҖӮ
pcWriteBufferпјҡд»»еҠЎзҡ„иҝҗиЎҢж—¶й—ҙдҝЎжҒҜдјҡеҶҷе…ҘиҝҷдёӘзј“еҶІеҢәпјҢдёәASCIIиЎЁеҚ•еҪўејҸгҖӮиҝҷдёӘзј“еҶІеҢәиҰҒи¶іеӨҹеӨ§пјҢд»Ҙе®№зәіз”ҹжҲҗзҡ„жҠҘе‘ҠпјҢжҜҸдёӘд»»еҠЎеӨ§зәҰйңҖиҰҒ40дёӘеӯ—иҠӮгҖӮ
&&&д»Ҙlpc17xxзі»еҲ—дёәжҺ§еҲ¶дёәдҫӢпјҢжҲ‘们дҪҝз”Ёе®ҡж—¶еҷЁ0жқҘдҪңдёәз»ҹи®ЎеҹәеҮҶж—¶й’ҹгҖӮ
&&&еңЁж–Ү件FreeRTOSConfig.hдёӯпјҢи®ҫзҪ®е®ҸconfigGENERATE_RUN_TIME_STATSе’ҢconfigUSE_STATS_FORMATTING_FUNCTIONSдёә1пјҢ
void vConfigureTimerForRunTimeStats( void )
{
/* дҪҝиғҪе®ҡж—¶еҷЁ0зҡ„еӨ–и®ҫз”өжәҗпјҢй…ҚзҪ®еӨ–и®ҫж—¶й’ҹ */
PCONP |= 0x02UL;
PCLKSEL0 = (PCLKSEL0& (~(0x3<<2))) | (0x01 << 2);
/* еӨҚдҪҚе®ҡж—¶еҷЁ 0 */
T0TCR = 0x02;
/* дҪңдёәи®Ўж•°еҷЁ */
T0CTCR = 0x00;
/* йў„еҲҶйў‘пјҢи®ҫзҪ®еҗҲйҖӮзҡ„еҲҶиҫЁзҺҮеҚіеҸҜ */
T0PR = ( configCPU_CLOCK_HZ / 10000UL ) - 1UL;
/* еҗҜеҠЁи®Ўж•°еҷЁ */
T0TCR = 0x01;
}&&&еңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҡд№үдёӢеҲ—д»Јз Ғпјҡ
extern void vConfigureTimerForRunTimeStats( void ); #define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() vConfigureTimerForRunTimeStats() #defineportGET_RUN_TIME_COUNTER_VALUE() T0TC
voidvTaskSetApplicationTaskTag( TaskHandle_t xTask, TaskHookFunction_tpxTagValue );
&&&еҸҜд»Ҙз»ҷжҜҸдёӘд»»еҠЎеҲҶй…ҚдёҖдёӘж ҮзӯҫеҖјгҖӮиҝҷдёӘеҖјдёҖиҲ¬з”ЁдәҺеә”з”ЁзЁӢеәҸпјҢRTOSеҶ…ж ёдёҚдјҡдҪҝз”ЁгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸconfigUSE_APPLICATION_TASK_TAGеҝ…йЎ»и®ҫзҪ®дёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
xTaskпјҡд»»еҠЎеҸҘжҹ„гҖӮNULLиЎЁзӨәеҪ“еүҚд»»еҠЎгҖӮpxTagValueпјҡиҰҒеҲҶй…Қз»ҷд»»еҠЎзҡ„ж ҮзӯҫеҖјгҖӮиҝҷжҳҜдёҖдёӘTaskHookFunction_tзұ»еһӢзҡ„еҮҪж•°жҢҮй’ҲпјҢдҪҶд№ҹеҸҜд»Ҙз»ҷд»»еҠЎж ҮзӯҫеҲҶй…Қд»»ж„Ҹзҡ„еҖјгҖӮ
жіЁпјҡTaskHookFunction_tеҺҹеһӢе®ҡд№үпјҡtypedef BaseType_t (*TaskHookFunction_t)(void * )
/* еңЁиҝҷдёӘдҫӢеӯҗдёӯпјҢз»ҷд»»еҠЎи®ҫзҪ®дёҖдёӘж•ҙеҪўж ҮзӯҫеҖјгҖӮдҫӢеӯҗдёӯдҪҝз”ЁдәҶRTOSи·ҹиёӘй’©еӯҗе®ҸгҖӮ*/
void vATask( void *pvParameters )
{
/* дёәиҮӘе·ұзҡ„ж ҮзӯҫеҲҶй…ҚдёҖдёӘж•ҙеҪўеҖј */
vTaskSetApplicationTaskTag( NULL, ( void * ) 1 );
for( ;; )
{
/* д»»еҠЎдё»дҪ“д»Јз Ғ */
}
}
/*****************************************************************************/
/*еңЁиҝҷдёӘд»»еҠЎдёӯпјҢз»ҷд»»еҠЎи®ҫзҪ®дёҖдёӘеҮҪж•°ж ҮзӯҫеҖјгҖӮйҰ–е…Ҳе®ҡд№үдёҖдёӘеӣһи°ғеҮҪж•°пјҢиҝҷдёӘеҮҪж•°еҝ…йЎ»еЈ°жҳҺдёәTaskHookFunction_tзұ»еһӢгҖӮ */
static BaseType_t prvExampleTaskHook( void * pvParameter )
{
/* иҝҷйҮҢдёәз”ЁжҲ·е®ҡд№үд»Јз Ғ вҖ“еҸҜиғҪжҳҜи®°еҪ•ж•°жҚ®гҖҒжӣҙж–°д»»еҠЎзҠ¶жҖҒеҖјзӯүгҖӮ*/
return 0;
}
/* е°Ҷеӣһи°ғеҮҪж•°и®ҫзҪ®дёәд»»еҠЎзҡ„ж ҮзӯҫеҖјгҖӮ */
void vAnotherTask( void *pvParameters )
{
/* жіЁеҶҢеӣһи°ғеҮҪж•°*/
vTaskSetApplicationTaskTag( NULL, prvExampleTaskHook );
for( ;; )
{
/* д»»еҠЎдё»дҪ“д»Јз Ғ */
}
}
/* жҜҸеҪ“д»»еҠЎеҲҮжҚўж—¶пјҢдјҡи°ғз”ЁxTaskCallApplicationTaskHook еҮҪж•°пјҲи§Ғ14.пјүгҖӮ */
#define traceTASK_SWITCHED_OUT() xTaskCallApplicationTaskHook(pxCurrentTCB,0 )TaskHookFunction_txTaskGetApplicationTaskTag( TaskHandle_t xTask );
иҝ”еӣһеҲҶй…Қз»ҷд»»еҠЎзҡ„ж ҮзӯҫеҖјгҖӮзЁӢеәҸе‘ҳе®ҡд№үж ҮзӯҫеҖјпјҢRTOSеҶ…ж ёйҖҡеёёдёҚдјҡи®ҝй—®ж ҮзӯҫеҖјгҖӮ
еҮҪж•°д»…еҜ№й«ҳзә§з”ЁжҲ·дҪҝз”ЁгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸconfigUSE_APPLICATION_TASK_TAGеҝ…йЎ»и®ҫзҪ®дёә1пјҢжӯӨеҮҪж•°жүҚжңүж•ҲгҖӮ
xTaskпјҡд»»еҠЎеҸҘжҹ„гҖӮNULLиЎЁзӨәеҪ“еүҚд»»еҠЎгҖӮ
иҝ”еӣһжҢҮе®ҡд»»еҠЎзҡ„ж ҮзӯҫеҖјгҖӮ
BaseType_txTaskCallApplicationTaskHook( TaskHandle_txTask, void*pvParameter );
еҸҜд»ҘдёәжҜҸдёӘд»»еҠЎеҲҶй…ҚдёҖдёӘж ҮзӯҫеҖјпјҢеҪ“иҝҷдёӘеҖјжҳҜдёҖдёӘTaskHookFunction_tзұ»еһӢеҮҪж•°жҢҮй’Ҳж—¶пјҢзӣёеҪ“дәҺеә”з”ЁзЁӢеәҸеҗ‘д»»еҠЎжіЁеҶҢдәҶдёҖдёӘеӣһи°ғеҮҪж•°пјҢиҖҢAPIеҮҪж•°xTaskCallApplicationTaskHookз”ЁжқҘи°ғз”ЁиҝҷдёӘеӣһи°ғеҮҪж•°гҖӮ
дёҖиҲ¬иҝҷдёӘеҮҪж•°й…ҚеҗҲRTOSи·ҹиёӘй’©еӯҗе®ҸдҪҝз”ЁпјҢи§Ғ12.и®ҫзҪ®д»»еҠЎж ҮзӯҫеҖјдёҖиҠӮзҡ„з”Ёжі•дёҫдҫӢгҖӮ
xTaskпјҡд»»еҠЎеҸҘжҹ„гҖӮNULLиЎЁзӨәеҪ“еүҚд»»еҠЎгҖӮpvParameterпјҡдҪңдёәеҸӮж•°дј йҖ’з»ҷеә”з”Ёй’©еӯҗеҮҪж•°
void vTaskSetThreadLocalStoragePointer(TaskHandle_t xTaskToSet, BaseType_t xIndex, void*pvValue )
жӯӨеҮҪж•°д»…з”ЁдәҺй«ҳзә§з”ЁжҲ·гҖӮ
зәҝзЁӢжң¬ең°еӯҳеӮЁе…Ғи®ёеә”з”ЁзЁӢеәҸеңЁд»»еҠЎзҡ„жҺ§еҲ¶еқ—дёӯеӯҳеӮЁдёҖдәӣеҖјпјҢжҜҸдёӘд»»еҠЎйғҪжңүиҮӘе·ұзӢ¬з«Ӣзҡ„еӮЁеӯҳз©әй—ҙгҖӮ
жҜ”еҰӮпјҢи®ёеӨҡеә“еҮҪж•°йғҪеҢ…еҗ«дёҖдёӘеҸ«еҒҡerrnoзҡ„е…ЁеұҖеҸҳйҮҸгҖӮжҹҗдәӣеә“еҮҪж•°дҪҝз”Ёerrnoиҝ”еӣһеә“еҮҪж•°й”ҷиҜҜдҝЎжҒҜпјҢеә”з”ЁзЁӢеәҸжЈҖжҹҘиҝҷдёӘе…ЁеұҖеҸҳйҮҸжқҘзЎ®е®ҡеҸ‘з”ҹдәҶйӮЈдәӣй”ҷиҜҜгҖӮеңЁеҚ•зәҝзЁӢзЁӢеәҸдёӯпјҢе°Ҷerrnoе®ҡд№үжҲҗе…ЁеұҖеҸҳйҮҸжҳҜеҸҜд»Ҙзҡ„пјҢдҪҶжҳҜеңЁеӨҡзәҝзЁӢеә”з”ЁдёӯпјҢжҜҸдёӘзәҝзЁӢпјҲд»»еҠЎпјүеҝ…йЎ»е…·жңүиҮӘе·ұзӢ¬жңүзҡ„errnoеҖјпјҢеҗҰеҲҷпјҢдёҖдёӘд»»еҠЎеҸҜиғҪдјҡиҜ»еҸ–еҲ°еҸҰдёҖдёӘд»»еҠЎзҡ„errnoеҖјгҖӮ
FreeRTOSжҸҗдҫӣдәҶдёҖдёӘзҒөжҙ»зҡ„жңәеҲ¶пјҢдҪҝеҫ—еә”з”ЁзЁӢеәҸеҸҜд»ҘдҪҝз”ЁзәҝзЁӢжң¬ең°еӯҳеӮЁжҢҮй’ҲжқҘиҜ»еҶҷзәҝзЁӢжң¬ең°еӯҳеӮЁгҖӮеңЁж–Ү件FreeRTOSConfig.hдёӯпјҢе®ҸconfigNUM_THREAD_LOCAL_STORAGE_POINTERSжҢҮе®ҡжҜҸдёӘд»»еҠЎзәҝзЁӢжң¬ең°еӯҳеӮЁжҢҮй’Ҳж•°з»„зҡ„еӨ§е°ҸгҖӮAPIеҮҪж•°vTaskSetThreadLocalStoragePointer()з”ЁдәҺеҗ‘жҢҮй’Ҳж•°з»„дёӯеҶҷе…ҘеҖјпјҢAPIеҮҪж•°pvTaskGetThreadLocalStoragePointer()з”ЁдәҺд»ҺжҢҮй’Ҳж•°з»„дёӯиҜ»еҸ–еҖјгҖӮ
xTaskToSetпјҡд»»еҠЎеҸҘжҹ„гҖӮNULLиЎЁзӨәеҪ“еүҚд»»еҠЎгҖӮ
xIndexпјҡеҶҷе…ҘеҲ°зәҝзЁӢжң¬ең°еӯҳеӮЁж•°з»„зҡ„зҙўеј•еҸ·пјҢзәҝзЁӢжң¬з¬ғеӯҳеӮЁж•°з»„зҡ„еӨ§е°Ҹз”ұе®ҸconfigNUM_THREAD_LOCAL_STORAGE_POINTERSи®ҫе®ҡпјҢиҜҘе®ҸеңЁж–Ү件FreeRTOSConfig.hдёӯгҖӮ
pvValueпјҡеҶҷе…ҘеҲ°жҢҮе®ҡзҙўеј•ең°еқҖзҡ„ж•°жҚ®еҖј
&&еҸӮи§Ғ16.иҺ·еҸ–зәҝзЁӢжң¬ең°еӯҳеӮЁжҢҮй’ҲдёҖиҠӮгҖӮ
void*pvTaskGetThreadLocalStoragePointer( TaskHandle_txTaskToQuery, BaseType_txIndex );
жӯӨеҮҪж•°д»…з”ЁдәҺй«ҳзә§з”ЁжҲ·гҖӮд»ҺзәҝзЁӢжң¬ең°еӯҳеӮЁжҢҮй’Ҳж•°з»„дёӯиҜ»еҸ–еҖјгҖӮжӣҙиҜҰз»ҶжҸҸиҝ°и§Ғ15.и®ҫзҪ®зәҝзЁӢжң¬ең°еӯҳеӮЁжҢҮй’ҲдёҖиҠӮгҖӮ
xTaskToQueryпјҡд»»еҠЎеҸҘжҹ„гҖӮNULLиЎЁзӨәеҪ“еүҚд»»еҠЎгҖӮ
xIndexпјҡеҶҷе…ҘеҲ°зәҝзЁӢжң¬ең°еӯҳеӮЁж•°з»„зҡ„зҙўеј•еҸ·пјҢзәҝзЁӢжң¬з¬ғеӯҳеӮЁж•°з»„зҡ„еӨ§е°Ҹз”ұе®ҸconfigNUM_THREAD_LOCAL_STORAGE_POINTERSи®ҫе®ҡпјҢиҜҘе®ҸеңЁж–Ү件FreeRTOSConfig.hдёӯгҖӮ
иҝ”еӣһдёҖдёӘжҢҮй’ҲпјҢиҝҷдёӘжҢҮй’ҲеӯҳеӮЁеңЁзәҝзЁӢжң¬ең°еӯҳеӮЁжҢҮй’Ҳж•°з»„дёӯпјҢж•°з»„зҙўеј•з”ұеҸӮж•°xIndexжҢҮе®ҡгҖӮ
uint32_tulVariable; /* еҗ‘еҪ“еүҚд»»еҠЎзҡ„зәҝзЁӢжң¬ең°еӯҳеӮЁж•°з»„дёӢж Үдёә1зҡ„дҪҚзҪ®еҶҷе…ҘдёҖдёӘжҢҮеҗ‘32дҪҚеёёйҮҸеҖјзҡ„жҢҮй’ҲгҖӮ*/ vTaskSetThreadLocalStoragePointer(NULL, 1, ( void * ) 0x12345678 ); /*еҗ‘еҪ“еүҚд»»еҠЎзҡ„зәҝзЁӢжң¬ең°еӯҳеӮЁж•°з»„дёӢж Үдёә0зҡ„дҪҚзҪ®еҶҷе…ҘдёҖдёӘжҢҮеҗ‘32ж•ҙеҪўеҖјзҡ„жҢҮй’Ҳ*/ ulVariable= ERROR_CODE; vTaskSetThreadLocalStoragePointer(NULL, 0, ( void * ) ulVariable ); /*д»ҺеҪ“еүҚд»»еҠЎзҡ„зәҝзЁӢжң¬ең°еӯҳеӮЁж•°з»„дёӢж Үдёә5зҡ„дҪҚзҪ®иҜ»еҸ–еҮәдёҖдёӘжҢҮй’Ҳ并иөӢеҖјз»ҷ32дҪҚж•ҙеҪўеҸҳйҮҸгҖӮ*/ ulVariable= ( uint32_t ) pvTaskGetThreadLocalStoragePointer( NULL, 5 );
typedefstruct
{
uint32_t ulValue1;
uint32_t ulValue2;
}xExampleStruct;
xExampleStruct*pxStruct;
/*дёәз»“жһ„дҪ“еҲҶй…ҚеҶ…еӯҳ*/
pxStruct= pvPortMalloc( sizeof( xExampleStruct ) );
/*дёәз»“жһ„дҪ“жҲҗе‘ҳиөӢеҖј*/
pxStruct->ulValue1= 0;
pxStruct->ulValue2= 1;
/*еҗ‘еҪ“еүҚд»»еҠЎзҡ„зәҝзЁӢжң¬ең°еӯҳеӮЁж•°з»„дёӢж Үдёә0зҡ„дҪҚзҪ®еҶҷе…ҘдёҖдёӘжҢҮеҗ‘з»“жһ„дҪ“еҸҳйҮҸзҡ„жҢҮй’Ҳ*/
vTaskSetThreadLocalStoragePointer(NULL, 0, ( void * ) pxStruct );
/*д»ҺеҪ“еүҚд»»еҠЎзҡ„зәҝзЁӢжң¬ең°еӯҳеӮЁж•°з»„дёӢж Үдёә0зҡ„дҪҚзҪ®иҜ»еҸ–еҮәдёҖдёӘз»“жһ„дҪ“жҢҮй’Ҳ*/
pxStruct= ( xExampleStruct * ) pvTaskGetThreadLocalStoragePointer( NULL, 0 );void vTaskSetTimeOutState( TimeOut_t *const pxTimeOut );
жӯӨеҮҪж•°д»…з”ЁдәҺй«ҳзә§з”ЁжҲ·пјҢйҖҡеёёдёҺAPIеҮҪж•°xTaskCheckForTimeOut()е…ұеҗҢдҪҝз”ЁгҖӮ
д»»еҠЎеӣ дёәзӯүеҫ…жҹҗдәӢ件иҖҢиҝӣе…Ҙйҳ»еЎһзҠ¶жҖҒпјҢйҖҡеёёжғ…еҶөдёӢд»»еҠЎдјҡи®ҫзҪ®дёҖдёӘзӯүеҫ…и¶…ж—¶е‘ЁжңҹгҖӮеҰӮжһңеңЁзӯүеҫ…дәӢ件超时пјҢд»»еҠЎдјҡйҖҖеҮәйҳ»еЎһзҠ¶жҖҒгҖӮжғіиұЎдёҖдёӘиҝҷж ·зҡ„еә”з”ЁпјҢжҹҗд»»еҠЎзӯүеҫ…дёҖдёӘдәӢ件иҖҢиҝӣе…Ҙйҳ»еЎһзҠ¶жҖҒпјҢдҪҶжҳҜдәӢ件иҝҹиҝҹдёҚеҸ‘з”ҹпјҢи¶…ж—¶еҗҺд»»еҠЎйҖҖеҮәйҳ»еЎһзҠ¶жҖҒ继з»ӯжү§иЎҢд»»еҠЎгҖӮеҒҮеҰӮд»»еҠЎзӯүеҫ…зҡ„дәӢ件д»Қ然没жңүеҸ‘з”ҹпјҢеҲҷд»»еҠЎеҸҲдјҡйҳ»еЎһеңЁиҜҘдәӢ件дёӢгҖӮеҸӘиҰҒд»»еҠЎзӯүеҫ…зҡ„дәӢ件дёҖзӣҙдёҚеҸ‘з”ҹпјҢиҝҷдёӘд»»еҠЎиҝӣе…Ҙйҳ»еЎһ然еҗҺи¶…ж—¶йҖҖеҮәйҳ»еЎһпјҢеҶҚиҝӣе…Ҙйҳ»еЎһзҡ„еҫӘзҺҜе°ұдјҡдёҖзӣҙеӯҳеңЁгҖӮжҳҜдёҚжҳҜеҸҜд»Ҙи®ҫе®ҡдёҖдёӘжҖ»и¶…ж—¶ж—¶й—ҙпјҢеҸӘиҰҒжҖ»йҳ»еЎһж—¶й—ҙеӨ§дәҺиҝҷдёӘжҖ»и¶…ж—¶ж—¶й—ҙпјҢеҲҷеҸҜд»Ҙз»“жқҹиҝҷдёӘд»»еҠЎжҲ–иҝӣиЎҢзӣёеә”и®°еҪ•пјҹfreeRTOSжҸҗдҫӣдәҶдёӨдёӘAPIеҮҪж•°жқҘе®ҢжҲҗиҝҷдёӘеҠҹиғҪпјҢиҝҷе°ұжҳҜvTaskSetTimeOutState()е’ҢxTaskCheckForTimeOut()гҖӮ
vTaskSetTimeOutState()еҮҪж•°з”ЁдәҺи®ҫзҪ®еҲқе§ӢжқЎд»¶пјҢд№ӢеҗҺи°ғз”ЁxTaskCheckForTimeOut()еҮҪж•°жЈҖжҹҘд»»еҠЎжҖ»йҳ»еЎһж—¶й—ҙжҳҜеҗҰи¶…иҝҮжҖ»и¶…ж—¶ж—¶й—ҙпјҢеҰӮжһңжІЎжңүи¶…иҝҮпјҢеҲҷи°ғж•ҙеү©дҪҷзҡ„и¶…ж—¶ж—¶й—ҙи®Ўж•°еҷЁгҖӮ
pxTimeOutпјҡжҢҮеҗ‘дёҖдёӘз»“жһ„дҪ“зҡ„жҢҮй’ҲпјҢиҜҘз»“жһ„дҪ“з”ЁжқҘдҝқеӯҳзЎ®е®ҡи¶…ж—¶жҳҜеҗҰеҸ‘з”ҹзҡ„еҝ…иҰҒдҝЎжҒҜгҖӮvTaskSetTimeOutState()еҮҪж•°дјҡи®ҫзҪ®з»“жһ„дҪ“зҡ„жҲҗе‘ҳгҖӮ
еҸӮи§Ғ18.и¶…ж—¶жЈҖжөӢгҖӮ
BaseType_t xTaskCheckForTimeOut(TimeOut_t * const pxTimeOut, TickType_t* const pxTicksToWait );
жӯӨеҮҪж•°д»…з”ЁдәҺй«ҳзә§з”ЁжҲ·пјҢйҖҡеёёдёҺAPIеҮҪж•°vTaskSetTimeOutStateе…ұеҗҢдҪҝз”ЁгҖӮ
иҜҰз»ҶжҸҸиҝ°и§Ғ17.и®ҫзҪ®и¶…ж—¶зҠ¶жҖҒгҖӮ
pxTimeOutпјҡжҢҮеҗ‘дёҖдёӘз»“жһ„дҪ“зҡ„жҢҮй’ҲгҖӮиҜҘз»“жһ„дҪ“дҝқеӯҳзЎ®е®ҡи¶…ж—¶жҳҜеҗҰеҸ‘з”ҹзҡ„еҝ…иҰҒдҝЎжҒҜгҖӮдҪҝз”ЁAPIеҮҪж•°vTaskSetTimeOutStateеҲқе§ӢеҢ–иҜҘз»“жһ„дҪ“гҖӮ
pxTicksToWaitпјҡTickType_tжҢҮй’ҲпјҢжҢҮеҗ‘зҡ„еҸҳйҮҸдҝқеӯҳжҖ»и¶…ж—¶ж—¶й—ҙгҖӮ
pdTRUEпјҡжҖ»и¶…ж—¶еҸ‘з”ҹpdFALSEпјҡжҖ»и¶…ж—¶жңӘеҸ‘з”ҹ
/* еҮҪж•°з”ЁдәҺд»ҺRXзј“еҶІеҢәдёӯжҺҘ收uxWantedBytesеӯ—иҠӮж•°жҚ®пјҢRXзј“еҶІеҢәз”ұUARTдёӯж–ӯеЎ«е……гҖӮеҰӮжһңRXзј“еҶІеҢәжІЎжңүи¶іеӨҹзҡ„ж•°жҚ®пјҢеҲҷд»»еҠЎиҝӣе…Ҙйҳ»еЎһзҠ¶жҖҒпјҢзӣҙеҲ°RXзј“еҶІеҢәжңүи¶іеӨҹж•°жҚ®жҲ–иҖ…еҸ‘з”ҹи¶…ж—¶гҖӮеҰӮжһңи¶…ж—¶еҗҺд»Қ然没жңүи¶іеӨҹзҡ„ж•°жҚ®пјҢеҲҷд»»еҠЎдјҡеҶҚж¬Ўиҝӣе…Ҙйҳ»еЎһзҠ¶жҖҒпјҢxTaskCheckForTimeOut()еҮҪж•°з”ЁдәҺйҮҚж–°и®Ўз®—жҖ»и¶…ж—¶ж—¶й—ҙд»ҘзЎ®дҝқжҖ»йҳ»еЎһзҠ¶жҖҒж—¶й—ҙдёҚи¶…иҝҮMAX_TIME_TO_WAITгҖӮеҰӮжһңжҖ»йҳ»еЎһзҠ¶жҖҒж—¶й—ҙеӨ§дәҺдәҶжҖ»и¶…ж—¶ж—¶й—ҙпјҢеҲҷдёҚз®ЎRXзј“еҶІеҢәжҳҜеҗҰжңүе……и¶іж•°жҚ®пјҢйғҪе°Ҷиҝҷдәӣж•°жҚ®иҜ»еҮәжқҘгҖӮ
*/
size_txUART_Receive( uint8_t *pucBuffer, size_t uxWantedBytes )
{
size_t uxReceived = 0;
TickType_t xTicksToWait = MAX_TIME_TO_WAIT;
TimeOut_t xTimeOut;
/* еҲқе§ӢеҢ–з»“жһ„дҪ“еҸҳйҮҸxTimeOutгҖӮ*/
vTaskSetTimeOutState( &xTimeOut );
/* ж— йҷҗеҫӘзҺҜпјҢзӣҙеҲ°зј“еҶІеҢәеҢ…еҗ«и¶іеӨҹзҡ„ж•°жҚ®жҲ–иҖ…йҳ»еЎһи¶…ж—¶еҸ‘з”ҹгҖӮ*/
while( UART_bytes_in_rx_buffer(pxUARTInstance ) < uxWantedBytes )
{
/* RXзј“еҶІеҢәжІЎжңүи¶іеӨҹеӨҡзҡ„ж•°жҚ®пјҢиЎЁзӨәд»»еҠЎе·Із»Ҹиҝӣе…ҘиҝҮдёҖж¬Ўйҳ»еЎһзҠ¶жҖҒгҖӮи°ғз”ЁAPIеҮҪж•°xTaskCheckForTimeOutжЈҖжҹҘжҖ»йҳ»еЎһж—¶й—ҙжҳҜеҗҰи¶…иҝҮжҖ»и¶…ж—¶ж—¶й—ҙпјҢеҰӮжһңжІЎжңүпјҢеҲҷи°ғж•ҙеү©дҪҷзҡ„жҖ»и¶…ж—¶ж—¶й—ҙгҖӮ*/
if( xTaskCheckForTimeOut( &xTimeOut,&xTicksToWait ) != pdFALSE )
{
/* еҰӮжһңжҖ»йҳ»еЎһж—¶й—ҙеӨ§дәҺжҖ»и¶…ж—¶ж—¶й—ҙпјҢеҲҷйҖҖеҮәиҝҷдёӘеҫӘзҺҜ */
break;
}
/* еңЁзӯүеҫ…дәҶxTicksToWaitдёӘзі»з»ҹиҠӮжӢҚе‘ЁжңҹеҗҺпјҢеҗ‘жҺҘ收дёӯж–ӯеҸ‘еҮәйҖҡзҹҘпјҢйңҖиҰҒжӣҙеӨҡж•°жҚ®гҖӮ
*/
ulTaskNotifyTake( pdTRUE, xTicksToWait );
}
/*д»ҺRXзј“еҶІеҢәиҜ»еҸ–uxWantedBytesдёӘеӯ—иҠӮ并ж”ҫеҲ°pucBufferзј“еҶІеҢәгҖӮ*/
uxReceived = UART_read_from_receive_buffer(pxUARTInstance, pucBuffer, uxWantedBytes );
return uxReceived;
}иҜ»еҲ°иҝҷйҮҢпјҢиҝҷзҜҮвҖңFreeRTOSе®һж—¶ж“ҚдҪңзі»з»ҹзҡ„д»»еҠЎеә”з”ЁеҮҪж•°жҳҜд»Җд№ҲвҖқж–Үз« е·Із»Ҹд»Ӣз»Қе®ҢжҜ•пјҢжғіиҰҒжҺҢжҸЎиҝҷзҜҮж–Үз« зҡ„зҹҘиҜҶзӮ№иҝҳйңҖиҰҒеӨ§е®¶иҮӘе·ұеҠЁжүӢе®һи·өдҪҝз”ЁиҝҮжүҚиғҪйўҶдјҡпјҢеҰӮжһңжғідәҶи§ЈжӣҙеӨҡзӣёе…іеҶ…е®№зҡ„ж–Үз« пјҢж¬ўиҝҺе…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“гҖӮ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ