жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
Timed GPIOй©ұеҠЁзЁӢеәҸеҲҶжһҗ
Timed GPIOй©ұеҠЁзЁӢеәҸжҳҜandroidзі»з»ҹеҹәдәҺlinuxеҶ…ж ёж–°еўһеҠ зҡ„дёҖзұ»й©ұеҠЁзЁӢеәҸпјҢиҝҷзұ»й©ұеҠЁзЁӢеәҸдё»иҰҒжҳҜиҝҗз”ЁдәҶеҶ…ж ёе®ҡж—¶еҷЁпјҢдёҺеҶ…ж ёе®ҡж—¶еҷЁиҝӣиЎҢз»‘е®ҡпјҢдҪҝеҫ—жҺ§еҲ¶GPIOеҸЈзҡ„й«ҳдҪҺз”өе№ідёҺж—¶й—ҙжү“дёҠе…ізі»пјҢж—ўеҸҜд»Ҙе®һзҺ°еңЁдёҖе®ҡзҡ„ж—¶й—ҙе®һзҺ°GPIOеҸЈдёәй«ҳжҲ–иҖ…дҪҺз”өе№ігҖӮTimed GPIOй©ұеҠЁиў«е®һзҺ°дёәе№іеҸ°и®ҫеӨҮй©ұеҠЁпјҢTimed GPIOй©ұеҠЁжәҗз ҒдҪҚдәҺеҰӮдёӢзӣ®еҪ•пјҡ\kernel\drivers\staging\android
Timed GPIOй©ұеҠЁзЁӢеәҸдё»иҰҒеҢ…жӢ¬еҰӮдёӢеҮ дёӘж–Ү件пјҡ
Timed_gpio.c
Timed_gpio.h
Timed_output.c
Timed_output.h
Timed_gpio.cж–Ү件дёәе…·дҪ“зҡ„й©ұеҠЁзЁӢеәҸпјҢTimed_output.cдёәеҗ‘sysж–Ү件系з»ҹжіЁеҶҢзұ»зҡ„жЎҶжһ¶д»Јз ҒпјҢ
дёӢйқўе°Ҷе…·дҪ“еҲҶжһҗжҜҸдёҖдёӘж–Ү件зҡ„дҪңз”ЁеҸҠе®һзҺ°зҡ„е…·дҪ“еҠҹиғҪгҖӮ
йҰ–е…ҲеҲҶжһҗжіЁеҶҢзұ»зҡ„жЎҶжһ¶д»Јз Ғ пјҡTimed_output.c Timed_output.h
Timed_output.hж–Ү件еҲҶжһҗпјҡ
struct timed_output_dev {
const char *name;
void (*enable)(struct timed_output_dev *sdev, int timeout);
int (*get_time)(struct timed_output_dev *sdev);
struct device *dev;
int index;
int state;
};
extern int timed_output_dev_register(struct timed_output_dev *dev);
extern void timed_output_dev_unregister(struct timed_output_dev *dev);
Timed_output.hж–Ү件主иҰҒе®ҡд№үдәҶдёҖдёӘз»“жһ„дҪ“timed_output_devи®ҫеӨҮз»“жһ„дҪ“пјҢиҜҘз»“жһ„дҪ“иЎЁзӨәдёҖдёӘе…·дҪ“зҡ„и®ҫеӨҮпјҢ
Nameпјҡд»ЈиЎЁTime GPIOи®ҫеӨҮзҡ„еҗҚеӯ—пјҢenableпјҡдёәдёҖдёӘеҮҪж•°жҢҮй’ҲпјҢдё»иҰҒз”ЁдәҺи®ҫзҪ®е®ҡж—¶еҷЁзҡ„иҝҮжңҹж—¶й—ҙпјҢ
Enableпјҡз”ЁдәҺиҺ·еҸ–зҰ»иҝҮжңҹиҝҳеү©дҪҷзҡ„ж—¶й—ҙгҖӮIndexпјҡдёәи®ҫеӨҮзҙўеј•еҸ·пјҢд»ЈиЎЁеҗҢдёҖеҗҚеӯ—зҡ„и®ҫеӨҮзҡ„ж•°йҮҸпјҢstateеёҰиЎЁеҪ“еүҚи®ҫеӨҮзҡ„зҠ¶жҖҒеҖјгҖӮ
timed_output_dev_registerпјҢtimed_output_dev_unregisterиҝҷдёӨдёӘеҮҪж•°еЈ°жҳҺз”ЁдәҺtimed_outputи®ҫеӨҮзҡ„жіЁеҶҢе’ҢеҚёиҪҪгҖӮ
Timed_output.cж–Ү件еҲҶжһҗпјҡ
иҜҘж–Ү件主иҰҒз”ЁдәҺеҗ‘зі»з»ҹжіЁеҶҢtimed_outputй©ұеҠЁзЁӢеәҸжЎҶжһ¶пјҢе…¶дёӯдё»иҰҒе®һзҺ°дәҶTimed_output.hж–Ү件дёӯе®ҡд№үзҡ„з»“жһ„дҪ“еҸҠеҮҪж•°гҖӮ
timed_outputжЎҶжһ¶жіЁеҶҢеҮҪж•°зҡ„е®һзҺ°пјҢиҝҷдёӘеҮҪж•°з”ЁдәҺе°Ҷй©ұеҠЁзЁӢеәҸжіЁеҶҢеҲ°kernelдёӯпјҢеҗҺйқўеҲҶжһҗTimed GPIOй©ұеҠЁзҡ„е…·дҪ“е®һзҺ°ж—¶дјҡи°ғз”ЁжӯӨеҮҪж•°еҗ‘зі»з»ҹжіЁеҶҢTimed GPIOй©ұеҠЁгҖӮ
int timed_output_dev_register(struct timed_output_dev *tdev)
{
int ret;
if (!tdev || !tdev->name || !tdev->enable || !tdev->get_time)
return -EINVAL;
ret = create_timed_output_class(); и°ғз”ЁжӯӨеҮҪж•°еңЁsys/classдёӢз”ҹжҲҗtimed_outputзұ»
if (ret < 0)
return ret;
tdev->index = atomic_inc_return(&device_count);
tdev->dev = device_create(timed_output_class, NULL,
MKDEV(0, tdev->index), NULL, tdev->name);
if (IS_ERR(tdev->dev))
return PTR_ERR(tdev->dev);
ret = device_create_file(tdev->dev, &dev_attr_enable);
if (ret < 0)
goto err_create_file;
dev_set_drvdata(tdev->dev, tdev);
tdev->state = 0;
return 0;
err_create_file:
device_destroy(timed_output_class, MKDEV(0, tdev->index));
printk(KERN_ERR "timed_output: Failed to register driver %s\n",
tdev->name);
return ret;
}
жӯӨеҮҪж•°з”ЁдәҺеңЁsys/classдёӢйқўеҲӣе»әзұ»пјҢзұ»зҡ„еҗҚеӯ—дёәtimed_output
static int create_timed_output_class(void)
{
if (!timed_output_class) {
timed_output_class = class_create(THIS_MODULE, "timed_output");
if (IS_ERR(timed_output_class))
return PTR_ERR(timed_output_class);
atomic_set(&device_count, 0);
}
return 0;
}
е…¶дёӯдёӢйқўдёӨдёӘеҮҪж•°жңҖдёәе…ій”®пјҢжҳҜеҶ…ж ёз©әй—ҙе’Ңз”ЁжҲ·з©әй—ҙзҡ„дј еҖјиҝҮзЁӢзҡ„е…·дҪ“е®һзҺ°еҮҪж•°пјҢ
enable_showеҮҪж•°и°ғз”Ёget_timeеҮҪ数并е°Ҷиҝ”еӣһзҡ„еү©дҪҷж—¶й—ҙеҶҷе…Ҙbufе№¶дј йҖ’еҲ°з”ЁжҲ·з©әй—ҙгҖӮ
static ssize_t enable_show(struct device *dev, struct device_attribute *attr,
char *buf)
{
struct timed_output_dev *tdev = dev_get_drvdata(dev);
int remaining = tdev->get_time(tdev);
return sprintf(buf, "%d\n", remaining);
}
enable_storeеҮҪж•°з”ЁдәҺе°Ҷз”ЁжҲ·з©әй—ҙдј йҖ’жқҘзҡ„bufеҖјеҶҷе…ҘеҶ…ж ёз©әй—ҙгҖӮ
static ssize_t enable_store(
struct device *dev, struct device_attribute *attr,
const char *buf, size_t size)
{
struct timed_output_dev *tdev = dev_get_drvdata(dev);
int value;
if (sscanf(buf, "%d", &value) != 1)
return -EINVAL;
tdev->enable(tdev, value);
return size;
}
Timed_gpio.hж–Ү件еҲҶжһҗпјҡ
#ifndef _LINUX_TIMED_GPIO_H
#define _LINUX_TIMED_GPIO_H
#define TIMED_GPIO_NAME "timed-gpio" //Time_GPIOй©ұеҠЁзҡ„еҗҚеӯ—пјҢе°ҶжҳҫзӨәеңЁ/sys/class/ timed_outputзӣ®еҪ•дёӢ
struct timed_gpio {
const char *name; //GPIOзҡ„еҗҚеӯ—
unsigned gpio; //е…·дҪ“зҡ„GPIOз®Ўи„ҡ
int max_timeout;//жңҖеӨ§зҡ„и¶…ж—¶ж—¶й—ҙ
u8 active_low; //IOеҸЈз”өе№ізҠ¶жҖҒиЎЁзӨәдҪҚ
};
timed_gpioз»“жһ„дҪ“д»…з”ЁдәҺе®ҡд№үеҚ•дёӘзҡ„GPIOзҡ„зӣёе…ідҝЎжҒҜ
gpio_platform_dataз»“жһ„дҪ“з”ЁдәҺе®ҡд№үдёҖз»„GPIOзҡ„зӣёе…ідҝЎжҒҜ
struct timed_gpio_platform_data {
int num_gpios;
struct timed_gpio *gpios;
};
#endif
дёӢйқўе°ҶеҲҶжһҗе…·дҪ“зҡ„Timed_gpioй©ұеҠЁзЁӢеәҸ
timed_gpio_driverе®ҡд№үеҰӮдёӢпјҡ
иҜҘеҮҪж•°жҢҮжҳҺдәҶе…·дҪ“зҡ„еҲқе§ӢеҢ–еҮҪж•°пјҲporeпјүе’Ң移йҷӨеҮҪж•°пјҲremoveпјүд»ҘеҸҠй©ұеҠЁзҡ„еҗҚеӯ—йўқжЁЎеқ—гҖӮ
static struct platform_driver timed_gpio_driver = {
.probe = timed_gpio_probe,
.remove = timed_gpio_remove,
.driver = {
.name = TIMED_GPIO_NAME,
.owner = THIS_MODULE,
},
};
и°ғз”Ёplatform_driver_registerеҮҪж•°еҗ‘kernelжіЁеҶҢе№іеҸ°й©ұеҠЁ
static int __init timed_gpio_init(void)
{
return platform_driver_register(&timed_gpio_driver);
}
timed_gpioжҺўжөӢеҮҪж•°
static int timed_gpio_probe(struct platform_device *pdev)
{
struct timed_gpio_platform_data *pdata = pdev->dev.platform_data;
struct timed_gpio *cur_gpio;
struct timed_gpio_data *gpio_data, *gpio_dat;
int i, j, ret = 0;
if (!pdata)
return -EBUSY; //дёәpdata->num_gpiosдёӘGPIOеҲҶй…ҚеҶ…еӯҳз©әй—ҙ
gpio_data = kzalloc(sizeof(struct timed_gpio_data) * pdata->num_gpios,
GFP_KERNEL);
if (!gpio_data)
return -ENOMEM;
for (i = 0; i < pdata->num_gpios; i++) {
cur_gpio = &pdata->gpios[i];
gpio_dat = &gpio_data[i];
hrtimer_init(&gpio_dat->timer, CLOCK_MONOTONIC,//еҲқе§ӢеҢ–е®ҡж—¶еҷЁ
HRTIMER_MODE_REL);
gpio_dat->timer.function = gpio_timer_func;//е®ҡж—¶еҷЁеӣһи°ғеҮҪж•°
spin_lock_init(&gpio_dat->lock);
gpio_dat->dev.name = cur_gpio->name;
gpio_dat->dev.get_time = gpio_get_time;
gpio_dat->dev.enable = gpio_enable;
ret = gpio_request(cur_gpio->gpio, cur_gpio->name);//з”іиҜ·GPIO
if (ret >= 0) {
ret = timed_output_dev_register(&gpio_dat->dev);//и°ғз”Ёtimed_outputжЎҶжһ¶жіЁеҶҢеҮҪж•°
if (ret < 0)
gpio_free(cur_gpio->gpio);
}
if (ret < 0) {
for (j = 0; j < i; j++) {
timed_output_dev_unregister(&gpio_data[i].dev);
gpio_free(gpio_data[i].gpio);
}
kfree(gpio_data);
return ret;
}
gpio_dat->gpio = cur_gpio->gpio;
gpio_dat->max_timeout = cur_gpio->max_timeout;
gpio_dat->active_low = cur_gpio->active_low;
gpio_direction_output(gpio_dat->gpio, gpio_dat->active_low);//еҲқе§ӢеҢ–GPIOзҡ„иҫ“еҮәеҖј
}
platform_set_drvdata(pdev, gpio_data);
return 0;
}
еҲқе§ӢеҢ–иҝҮзЁӢпјҡ
1. йҰ–е…Ҳи°ғз”ЁkzallocеҮҪж•°дёә GPIOеҲҶй…ҚеҶ…еӯҳз©әй—ҙ
2. и°ғз”Ёhrtimer_initеҮҪж•°еҲқе§ӢеҢ–еҢ–еҶ…ж ёе®ҡж—¶еҷЁ
3. и®ҫзҪ®GPIOзҡ„enableеҮҪж•°дёәgpio_enable
4. и®ҫзҪ®GPIOзҡ„get_timeеҮҪж•°дёәgpio_get_time
5. и°ғз”Ёtimed_output_dev_registerеҮҪж•°жіЁеҶҢи®ҫеӨҮй©ұеҠЁгҖӮ
6. еҲқе§ӢеҢ–timed_gpio_dataз»“жһ„дҪ“
7. и°ғз”Ёgpio_direction_outputеҮҪж•°и®ҫзҪ®GPIOзҡ„еҲқе§ӢеҖјгҖӮ
GPIOй©ұеҠЁз§»йҷӨеҮҪж•°,и°ғз”Ёtimed_output_dev_unregisterеҚёиҪҪй©ұеҠЁзЁӢеәҸ
static int timed_gpio_remove(struct platform_device *pdev)
{
struct timed_gpio_platform_data *pdata = pdev->dev.platform_data;
struct timed_gpio_data *gpio_data = platform_get_drvdata(pdev);
int i;
for (i = 0; i < pdata->num_gpios; i++) {
timed_output_dev_unregister(&gpio_data[i].dev);
gpio_free(gpio_data[i].gpio);
}
kfree(gpio_data);
return 0;
}
еҠҹиғҪеӣһи°ғеҮҪж•°gpio_timer_funcеҲҶжһҗпјҡе®ҡж—¶еҷЁи¶…ж—¶еҗҺе°Ҷжү§иЎҢжӯӨеҮҪж•°пјҢжӯӨеҮҪж•°ж №жҚ®active_lowзҡ„еҖјжқҘи®ҫзҪ®GPIOзҡ„й«ҳдҪҺз”өе№ігҖӮ
static enum hrtimer_restart gpio_timer_func(struct hrtimer *timer)
{
struct timed_gpio_data *data =
container_of(timer, struct timed_gpio_data, timer);
gpio_direction_output(data->gpio, data->active_low ? 1 : 0);
return HRTIMER_NORESTART;
}
gpio_enableеҮҪж•°дёәе…ій”®еҮҪж•°жҺҘеҸ—з”ЁжҲ·з©әй—ҙдј иҝҮжқҘзҡ„valueеҖјз”ЁдәҺеңЁдёҖе®ҡж—¶й—ҙйҮҢжҺ§еҲ¶GPIO
static void gpio_enable(struct timed_output_dev *dev, int value)
{
struct timed_gpio_data *data =
container_of(dev, struct timed_gpio_data, dev);
unsigned long flags;
spin_lock_irqsave(&data->lock, flags);
/* cancel previous timer and set GPIO according to value */
hrtimer_cancel(&data->timer);
gpio_direction_output(data->gpio, data->active_low ? !value : !!value);
if (value > 0) {
if (value > data->max_timeout)
value = data->max_timeout;
//еҗҜеҠЁе®ҡж—¶еҷЁеҮҪж•°
hrtimer_start(&data->timer,
ktime_set(value / 1000, (value % 1000) * 1000000),
HRTIMER_MODE_REL);
}
spin_unlock_irqrestore(&data->lock, flags);
}
еҲ°иҝҷйҮҢзӣёдҝЎеӨ§е®¶еҜ№Time GPIOй©ұеҠЁе·Із»Ҹз”ЁдәҶж·ұеҲ»зҡ„еҚ°иұЎе’Ңи®ӨиҜҶгҖӮдёӢйқўе°Ҷз”ЁдёҖе№…еӣҫжқҘиҜҙжҳҺж•ҙдёӘTime GPIOй©ұеҠЁзҡ„и°ғз”ЁиҝҮзЁӢгҖӮд»ҘжҖ»з»“еӣһйЎҫеүҚйқўзҡ„еҲҶжһҗгҖӮ
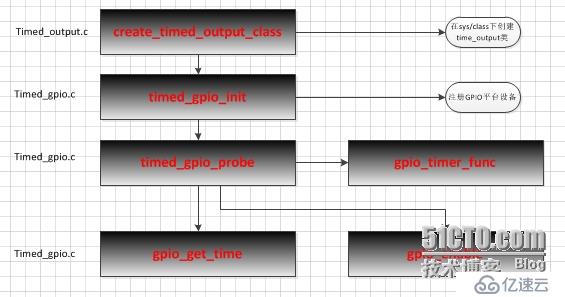
иҜ»иҖ…еҸҜд»Ҙж №жҚ®жҲ‘зҡ„еҲҶжһҗз»“еҗҲжәҗд»Јз Ғе…·дҪ“дәҶи§ЈжҜҸдёҖжӯҘзҡ„и°ғз”ЁиҝҮзЁӢгҖӮ
жіЁпјҡд»ҘдёҠж•ҙдёӘиҝҮзЁӢе®һзҺ°дәҶ并еҲӣе»әдәҶи®ҫеӨҮиҠӮзӮ№/sys/class/timed_output/timed-gpio
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ