жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
жң¬зҜҮеҶ…е®№д»Ӣз»ҚдәҶвҖңCиҜӯиЁҖеҶ…ж ёдҪҝз”ЁIO/DPCе®ҡж—¶еҷЁзҡ„ж–№жі•жҳҜд»Җд№ҲвҖқзҡ„жңүе…ізҹҘиҜҶпјҢеңЁе®һйҷ…жЎҲдҫӢзҡ„ж“ҚдҪңиҝҮзЁӢдёӯпјҢдёҚе°‘дәәйғҪдјҡйҒҮеҲ°иҝҷж ·зҡ„еӣ°еўғпјҢжҺҘдёӢжқҘе°ұи®©е°Ҹзј–еёҰйўҶеӨ§е®¶еӯҰд№ дёҖдёӢеҰӮдҪ•еӨ„зҗҶиҝҷдәӣжғ…еҶөеҗ§пјҒеёҢжңӣеӨ§е®¶д»”з»Ҷйҳ…иҜ»пјҢиғҪеӨҹеӯҰжңүжүҖжҲҗпјҒ
йҰ–е…ҲжқҘзңӢIOе®ҡж—¶еҷЁжҳҜеҰӮдҪ•дҪҝз”Ёзҡ„пјҢIOе®ҡж—¶еҷЁеңЁдҪҝз”ЁдёҠйңҖиҰҒи°ғз”ЁIoInitializeTimerеҮҪж•°еҜ№е®ҡж—¶еҷЁиҝӣиЎҢеҲқе§ӢеҢ–пјҢдҪҶйңҖиҰҒжіЁж„Ҹзҡ„жҳҜжӯӨеҮҪж•°жҜҸдёӘи®ҫеӨҮеҜ№иұЎеҸӘиғҪи°ғз”ЁдёҖж¬ЎпјҢеҪ“еҲқе§ӢеҢ–е®ҢжҲҗеҗҺз”ЁжҲ·еҸҜи°ғз”ЁIoStartTimerи®©иҝҷдёӘе®ҡж—¶еҷЁиҝҗиЎҢпјҢзӣёеҸҚзҡ„и°ғз”ЁIoStopTimerеҲҷз”ЁдәҺе…ій—ӯе®ҡж—¶гҖӮ
// еҲқе§ӢеҢ–е®ҡж—¶еҷЁ NTSTATUS IoInitializeTimer( [in] PDEVICE_OBJECT DeviceObject, // и®ҫеӨҮеҜ№иұЎ [in] PIO_TIMER_ROUTINE TimerRoutine, // еӣһи°ғдҫӢзЁӢ [in, optional] __drv_aliasesMem PVOID Context // еӣһи°ғдҫӢзЁӢеҸӮж•° ); // еҗҜеҠЁе®ҡж—¶еҷЁ VOID IoStartTimer( [in] PDEVICE_OBJECT DeviceObject // и®ҫеӨҮеҜ№иұЎ ); // е…ій—ӯе®ҡж—¶еҷЁ VOID IoStopTimer( [in] PDEVICE_OBJECT DeviceObject // и®ҫеӨҮеҜ№иұЎ );
иҝҷйҮҢжҲ‘们жңҖе…іеҝғзҡ„е…¶е®һжҳҜIoInitializeTimerеҮҪж•°дёӯзҡ„第дәҢдёӘеҸӮж•°TimerRoutineиҜҘеҸӮж•°з”ЁдәҺдј йҖ’дёҖдёӘиҮӘе®ҡд№үеӣһи°ғеҮҪж•°ең°еқҖпјҢе…¶ж¬Ўз”ұдәҺе®ҡж—¶еҷЁйңҖиҰҒдҫқйҷ„дәҺдёҖдёӘи®ҫеӨҮпјҢжүҖд»ҘжҲ‘们иҝҳйңҖиҰҒи°ғз”ЁIoCreateDeviceеҲӣе»әдёҖдёӘж–°и®ҫеӨҮжқҘи®©е®ҡж—¶еҷЁзәҝзЁӢдҪҝз”ЁпјҢе®һзҺ°е®ҡж—¶еҷЁд»Јз ҒеҰӮдёӢжүҖзӨәгҖӮ
// зҪІеҗҚжқғ
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <ntifs.h>
#include <wdm.h>
#include <ntstrsafe.h>
LONG count = 0;
// иҮӘе®ҡд№үе®ҡж—¶еҷЁеҮҪж•°
VOID MyTimerProcess( __in struct _DEVICE_OBJECT *DeviceObject, __in_opt PVOID Context)
{
InterlockedIncrement(&count);
DbgPrint("е®ҡж—¶еҷЁи®Ўж•° = %d", count);
}
VOID UnDriver(PDRIVER_OBJECT driver)
{
// е…ій—ӯе®ҡж—¶еҷЁ
IoStopTimer(driver->DeviceObject);
// еҲ йҷӨи®ҫеӨҮ
IoDeleteDevice(driver->DeviceObject);
DbgPrint(("Uninstall Driver Is OK \n"));
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
DbgPrint("hello lyshark \n");
NTSTATUS status = STATUS_UNSUCCESSFUL;
// е®ҡд№үи®ҫеӨҮеҗҚд»ҘеҸҠе®ҡж—¶еҷЁ
UNICODE_STRING dev_name = RTL_CONSTANT_STRING(L"");
PDEVICE_OBJECT dev;
status = IoCreateDevice(Driver, 0, &dev_name, FILE_DEVICE_UNKNOWN, FILE_DEVICE_SECURE_OPEN, FALSE, &dev);
if (!NT_SUCCESS(status))
{
return STATUS_UNSUCCESSFUL;
}
else
{
// еҲқе§ӢеҢ–е®ҡж—¶еҷЁе№¶ејҖеҗҜ
IoInitializeTimer(dev, MyTimerProcess, NULL);
IoStartTimer(dev);
}
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
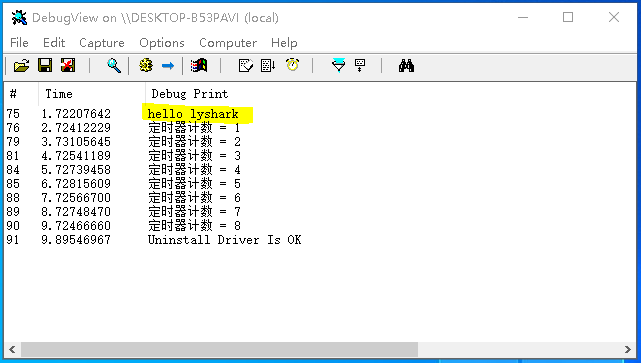
}зј–иҜ‘并иҝҗиЎҢиҝҷж®өд»Јз ҒпјҢйӮЈд№Ҳзі»з»ҹдјҡжҜҸйҡ”1з§’жү§иЎҢдёҖж¬ЎMyTimerProcessиҝҷдёӘиҮӘе®ҡд№үеҮҪж•°гҖӮ
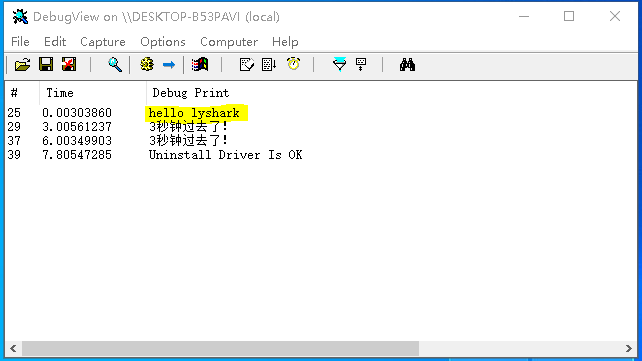
йӮЈд№ҲеҰӮдҪ•и®©е…¶жҜҸйҡ”дёүз§’жү§иЎҢдёҖж¬Ўе‘ўпјҢе…¶е®һеҫҲз®ҖеҚ•пјҢйҖҡиҝҮInterlockedDecrementеҮҪж•°е®һзҺ°йҖ’еҮҸпјҲжҜҸж¬Ўи°ғз”ЁйҖ’еҮҸ1пјүеҪ“и®Ўж•°еҷЁеҸҳдёә0ж—¶InterlockedCompareExchangeдјҡ让其继з»ӯеҸҳдёә3пјҢд»ҘжӯӨеҫӘзҺҜеҚіеҸҜе®ҢжҲҗдёүз§’иҫ“еҮәдёҖж¬Ўзҡ„ж•ҲжһңгҖӮ
LONG count = 3;
// иҮӘе®ҡд№үе®ҡж—¶еҷЁеҮҪж•°
VOID MyTimerProcess(__in struct _DEVICE_OBJECT *DeviceObject, __in_opt PVOID Context)
{
// йҖ’еҮҸи®Ўж•°
InterlockedDecrement(&count);
// еҪ“и®Ўж•°еҮҸеҲ°0д№ӢеҗҺ继з»ӯеҸҳдёә3
LONG preCount = InterlockedCompareExchange(&count, 3, 0);
//жҜҸйҡ”3з§’и®Ўж•°еҷЁдёҖдёӘеҫӘзҺҜиҫ“еҮәеҰӮдёӢдҝЎжҒҜ
if (preCount == 0)
{
DbgPrint("[LyShark] дёүз§’иҝҮеҺ»дәҶ \n");
}
}зЁӢеәҸиҝҗиЎҢеҗҺпјҢдҪ дјҡзңӢеҲ°еҰӮдёӢиҫ“еҮәж•Ҳжһңпјӣ
зӣёжҜ”дәҺIOе®ҡж—¶еҷЁжқҘиҜҙпјҢDPCе®ҡж—¶еҷЁеҲҷжӣҙеҠ зҒөжҙ»пјҢе…¶еҸҜеҜ№д»»ж„Ҹй—ҙйҡ”ж—¶й—ҙиҝӣиЎҢе®ҡж—¶пјҢDPCе®ҡж—¶еҷЁеҶ…йғЁдҪҝз”Ёе®ҡж—¶еҷЁеҜ№иұЎKTIMERпјҢеҪ“еҜ№е®ҡж—¶еҷЁи®ҫе®ҡдёҖдёӘж—¶й—ҙй—ҙйҡ”еҗҺпјҢжҜҸйҡ”иҝҷж®өж—¶й—ҙж“ҚдҪңзі»з»ҹдјҡе°ҶдёҖдёӘDPCдҫӢзЁӢжҸ’е…ҘDPCйҳҹеҲ—гҖӮеҪ“ж“ҚдҪңзі»з»ҹиҜ»еҸ–DPCйҳҹеҲ—ж—¶пјҢеҜ№еә”зҡ„DPCдҫӢзЁӢдјҡиў«жү§иЎҢпјҢжӯӨеӨ„жүҖиҜҙзҡ„DPCдҫӢзЁӢеҗҢж ·иЎЁзӨәеӣһи°ғеҮҪж•°гҖӮ
DPCе®ҡж—¶еҷЁдёӯжҲ‘们жүҖйңҖиҰҒдҪҝз”Ёзҡ„еҮҪж•°еЈ°жҳҺйғЁеҲҶеҰӮдёӢжүҖзӨәпјӣ
// еҲқе§ӢеҢ–е®ҡж—¶еҷЁеҜ№иұЎ PKTIMER жҢҮеҗ‘и°ғз”Ёж–№дёәе…¶жҸҗдҫӣеӯҳеӮЁзҡ„и®Ўж—¶еҷЁеҜ№иұЎзҡ„жҢҮй’Ҳ void KeInitializeTimer( [out] PKTIMER Timer // е®ҡж—¶еҷЁжҢҮй’Ҳ ); // еҲқе§ӢеҢ–DPCеҜ№иұЎ void KeInitializeDpc( [out] __drv_aliasesMem PRKDPC Dpc, [in] PKDEFERRED_ROUTINE DeferredRoutine, [in, optional] __drv_aliasesMem PVOID DeferredContext ); // и®ҫзҪ®е®ҡж—¶еҷЁ BOOLEAN KeSetTimer( [in, out] PKTIMER Timer, // е®ҡж—¶еҷЁеҜ№иұЎзҡ„жҢҮй’Ҳ [in] LARGE_INTEGER DueTime, // ж—¶й—ҙй—ҙйҡ” [in, optional] PKDPC Dpc // DPCеҜ№иұЎ ); // еҸ–ж¶Ҳе®ҡж—¶еҷЁ BOOLEAN KeCancelTimer( [in, out] PKTIMER unnamedParam1 // е®ҡж—¶еҷЁжҢҮй’Ҳ );
жіЁж„ҸпјӣеңЁи°ғз”ЁKeSetTimerеҗҺпјҢеҸӘдјҡи§ҰеҸ‘дёҖж¬ЎDPCдҫӢзЁӢгҖӮеҰӮжһңжғіе‘Ёжңҹзҡ„и§ҰеҸ‘DPCдҫӢзЁӢпјҢйңҖиҰҒеңЁDPCдҫӢзЁӢиў«и§ҰеҸ‘еҗҺпјҢеҶҚж¬Ўи°ғз”ЁKeSetTimerеҮҪж•°пјҢеә”з”ЁDPCе®ҡж—¶д»Јз ҒеҰӮдёӢжүҖзӨәгҖӮ
// зҪІеҗҚжқғ
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <ntifs.h>
#include <wdm.h>
#include <ntstrsafe.h>
LONG count = 0;
KTIMER g_ktimer;
KDPC g_kdpc;
// иҮӘе®ҡд№үе®ҡж—¶еҷЁеҮҪж•°
VOID MyTimerProcess(__in struct _KDPC *Dpc,__in_opt PVOID DeferredContext,__in_opt PVOID SystemArgument1,__in_opt PVOID SystemArgument2)
{
LARGE_INTEGER la_dutime = { 0 };
la_dutime.QuadPart = 1000 * 1000 * -10;
// йҖ’еўһи®Ўж•°еҷЁ
InterlockedIncrement(&count);
DbgPrint("DPC е®ҡж—¶жү§иЎҢ = %d", count);
// еҶҚж¬Ўи®ҫзҪ®е®ҡж—¶
KeSetTimer(&g_ktimer, la_dutime, &g_kdpc);
}
VOID UnDriver(PDRIVER_OBJECT driver)
{
// еҸ–ж¶Ҳи®Ўж•°еҷЁ
KeCancelTimer(&g_ktimer);
DbgPrint(("Uninstall Driver Is OK \n"));
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
DbgPrint("hello lyshark \n");
LARGE_INTEGER la_dutime = { 0 };
// жҜҸйҡ”1з§’жү§иЎҢдёҖж¬Ў
la_dutime.QuadPart = 1000 * 1000 * -10;
// 1.еҲқе§ӢеҢ–е®ҡж—¶еҷЁеҜ№иұЎ
KeInitializeTimer(&g_ktimer);
// 2.еҲқе§ӢеҢ–DPCе®ҡж—¶еҷЁ
KeInitializeDpc(&g_kdpc, MyTimerProcess, NULL);
// 3.и®ҫзҪ®е®ҡж—¶еҷЁ,ејҖе§Ӣи®Ўж—¶
KeSetTimer(&g_ktimer, la_dutime, &g_kdpc);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
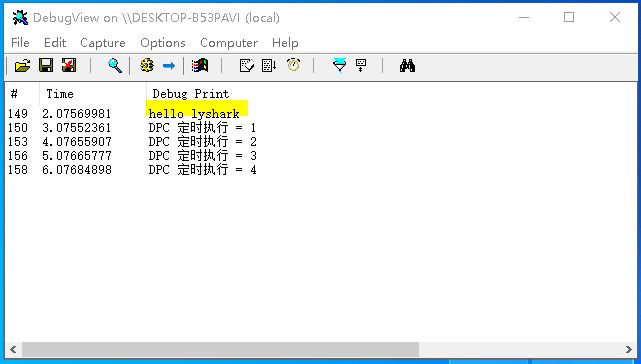
}зј–иҜ‘并иҝҗиЎҢиҝҷж®өзЁӢеәҸпјҢдјҡеҸ‘зҺ°е…¶иҝҗиЎҢеҗҺзҡ„е®ҡж—¶ж•ҲжһңдёҺIOе®ҡж—¶еҷЁе№¶ж— еӨӘеӨ§еҢәеҲ«пјҢдҪҶжҳҜDPCеҸҜд»ҘжҺ§еҲ¶жӣҙзІҫз»ҶпјҢйҖҡиҝҮla_dutime.QuadPart = 1000 * 1000 * -10жҜ«з§’зә§еҲ«йғҪеҸҜиў«жҺ§еҲ¶гҖӮ
жңҖеҗҺжү©еұ•дёҖдёӘзҹҘиҜҶзӮ№пјҢеҰӮдҪ•еҫ—еҲ°зі»з»ҹзҡ„еҪ“еүҚиҜҰз»Ҷж—¶й—ҙпјҢиҺ·еҫ—зі»з»ҹж—¶й—ҙгҖӮеңЁеҶ…ж ёйҮҢйҖҡиҝҮKeQuerySystemTimeиҺ·еҸ–зҡ„зі»з»ҹж—¶й—ҙжҳҜж ҮеҮҶж—¶й—ҙпјҲGMT+0пјүпјҢиҪ¬жҚўжҲҗжң¬ең°ж—¶й—ҙиҝҳйңҖдҪҝз”ЁRtlTimeToTimeFieldsеҮҪж•°е°Ҷе…¶иҪ¬жҚўдёәTIME_FIELDSз»“жһ„дҪ“ж јејҸгҖӮ
// зҪІеҗҚжқғ
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com
#include <ntifs.h>
#include <wdm.h>
#include <ntstrsafe.h>
/*
typedef struct TIME_FIELDS
{
CSHORT Year;
CSHORT Month;
CSHORT Day;
CSHORT Hour;
CSHORT Minute;
CSHORT Second;
CSHORT Milliseconds;
CSHORT Weekday;
} TIME_FIELDS;
*/
// еҶ…ж ёдёӯиҺ·еҸ–ж—¶й—ҙ
VOID MyGetCurrentTime()
{
LARGE_INTEGER CurrentTime;
LARGE_INTEGER LocalTime;
TIME_FIELDS TimeFiled;
// еҫ—еҲ°ж јжһ—еЁҒжІ»ж—¶й—ҙ
KeQuerySystemTime(&CurrentTime);
// иҪ¬жҲҗжң¬ең°ж—¶й—ҙ
ExSystemTimeToLocalTime(&CurrentTime, &LocalTime);
// иҪ¬жҚўдёәTIME_FIELDSж јејҸ
RtlTimeToTimeFields(&LocalTime, &TimeFiled);
DbgPrint("[ж—¶й—ҙдёҺж—Ҙжңҹ] %4dе№ҙ%2dжңҲ%2dж—Ҙ %2dж—¶%2dеҲҶ%2dз§’",
TimeFiled.Year, TimeFiled.Month, TimeFiled.Day,
TimeFiled.Hour, TimeFiled.Minute, TimeFiled.Second);
}
VOID UnDriver(PDRIVER_OBJECT driver)
{
DbgPrint(("Uninstall Driver Is OK \n"));
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
MyGetCurrentTime();
DbgPrint("hello lyshark \n");
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
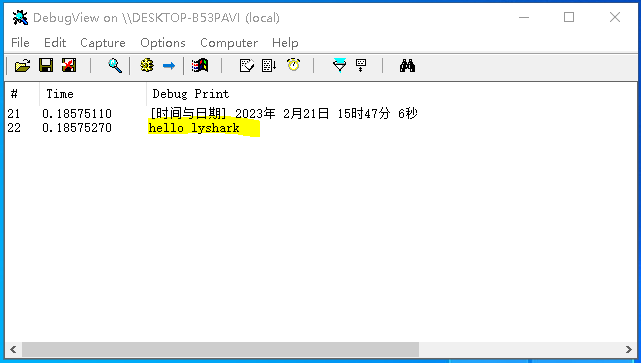
}иҝҗиЎҢеҗҺеҚіеҸҜеңЁеҶ…ж ёдёӯеҫ—еҲ°еҪ“еүҚзі»з»ҹзҡ„е…·дҪ“ж—¶й—ҙпјӣ
вҖңCиҜӯиЁҖеҶ…ж ёдҪҝз”ЁIO/DPCе®ҡж—¶еҷЁзҡ„ж–№жі•жҳҜд»Җд№ҲвҖқзҡ„еҶ…е®№е°ұд»Ӣз»ҚеҲ°иҝҷйҮҢдәҶпјҢж„ҹи°ўеӨ§е®¶зҡ„йҳ…иҜ»гҖӮеҰӮжһңжғідәҶи§ЈжӣҙеӨҡиЎҢдёҡзӣёе…ізҡ„зҹҘиҜҶеҸҜд»Ҙе…іжіЁдәҝйҖҹдә‘зҪ‘з«ҷпјҢе°Ҹзј–е°ҶдёәеӨ§е®¶иҫ“еҮәжӣҙеӨҡй«ҳиҙЁйҮҸзҡ„е®һз”Ёж–Үз« пјҒ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ