жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
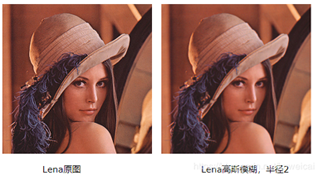
е°Ҹзј–иҝҷж¬ЎиҰҒз»ҷеӨ§е®¶еҲҶдә«зҡ„жҳҜеҰӮдҪ•е®һзҺ°python Cannyиҫ№зјҳжЈҖжөӢз®—жі•пјҢж–Үз« еҶ…е®№дё°еҜҢпјҢж„ҹе…ҙи¶Јзҡ„е°ҸдјҷдјҙеҸҜд»ҘжқҘдәҶи§ЈдёҖдёӢпјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« д№ӢеҗҺиғҪеӨҹжңүжүҖ收иҺ·гҖӮ
еӣҫеғҸиҫ№зјҳдҝЎжҒҜдё»иҰҒйӣҶдёӯеңЁй«ҳйў‘ж®өпјҢйҖҡеёёиҜҙеӣҫеғҸй”җеҢ–жҲ–жЈҖжөӢиҫ№зјҳпјҢе®һиҙЁе°ұжҳҜй«ҳйў‘ж»ӨжіўгҖӮжҲ‘们зҹҘйҒ“еҫ®еҲҶиҝҗз®—жҳҜжұӮдҝЎеҸ·зҡ„еҸҳеҢ–зҺҮпјҢе…·жңүеҠ ејәй«ҳйў‘еҲҶйҮҸзҡ„дҪңз”ЁгҖӮеңЁз©әеҹҹиҝҗз®—дёӯжқҘиҜҙпјҢеҜ№еӣҫеғҸзҡ„й”җеҢ–е°ұжҳҜи®Ўз®—еҫ®еҲҶгҖӮеҜ№дәҺж•°еӯ—еӣҫеғҸзҡ„зҰ»ж•ЈдҝЎеҸ·пјҢеҫ®еҲҶиҝҗз®—е°ұеҸҳжҲҗи®Ўз®—е·®еҲҶжҲ–жўҜеәҰгҖӮеӣҫеғҸеӨ„зҗҶдёӯжңүеӨҡз§Қиҫ№зјҳжЈҖжөӢпјҲжўҜеәҰпјүз®—еӯҗпјҢеёёз”Ёзҡ„еҢ…жӢ¬жҷ®йҖҡдёҖйҳ¶е·®еҲҶпјҢRobertз®—еӯҗпјҲдәӨеҸүе·®еҲҶпјүпјҢSobelз®—еӯҗзӯүзӯүпјҢжҳҜеҹәдәҺеҜ»жүҫжўҜеәҰејәеәҰгҖӮжӢүжҷ®жӢүж–Ҝз®—еӯҗпјҲдәҢйҳ¶е·®еҲҶпјүжҳҜеҹәдәҺиҝҮйӣ¶зӮ№жЈҖжөӢгҖӮйҖҡиҝҮи®Ўз®—жўҜеәҰпјҢи®ҫзҪ®йҳҖеҖјпјҢеҫ—еҲ°иҫ№зјҳеӣҫеғҸгҖӮ
Cannyиҫ№зјҳжЈҖжөӢз®—еӯҗжҳҜдёҖз§ҚеӨҡзә§жЈҖжөӢз®—жі•гҖӮ1986е№ҙз”ұJohn F. CannyжҸҗеҮәпјҢеҗҢж—¶жҸҗеҮәдәҶиҫ№зјҳжЈҖжөӢзҡ„дёүеӨ§еҮҶеҲҷпјҡ
Cannyз®—жі•еҮәзҺ°д»ҘеҗҺдёҖзӣҙжҳҜдҪңдёәдёҖз§Қж ҮеҮҶзҡ„иҫ№зјҳжЈҖжөӢз®—жі•пјҢжӯӨеҗҺд№ҹеҮәзҺ°дәҶеҗ„з§ҚеҹәдәҺCannyз®—жі•зҡ„ж”№иҝӣз®—жі•гҖӮж—¶иҮід»Ҡж—ҘпјҢCannyз®—жі•еҸҠе…¶еҗ„з§ҚеҸҳз§Қдҫқж—§жҳҜдёҖз§Қдјҳз§Җзҡ„иҫ№зјҳжЈҖжөӢз®—жі•гҖӮиҖҢдё”йҷӨйқһеүҚжҸҗжқЎд»¶еҫҲйҖӮеҗҲпјҢдҪ еҫҲйҡҫжүҫеҲ°дёҖз§Қиҫ№зјҳжЈҖжөӢз®—еӯҗиғҪжҳҫи‘—ең°жҜ”Cannyз®—еӯҗеҒҡзҡ„жӣҙеҘҪгҖӮ
е…ідәҺеҗ„з§Қе·®еҲҶз®—еӯҗпјҢиҝҳжңүCannyз®—еӯҗзҡ„з®ҖеҚ•д»Ӣз»ҚпјҢиҝҷйҮҢе°ұдёҚзҪ—е—ҰдәҶпјҢзҪ‘дёҠйғҪеҸҜд»Ҙжүҫеҫ—еҲ°гҖӮзӣҙжҺҘиҝӣе…ҘCannyз®—жі•зҡ„е®һзҺ°гҖӮCannyз®—жі•еҲҶдёәд»ҘдёӢеҮ жӯҘгҖӮ
1. й«ҳж–ҜжЁЎзіҠгҖӮ
иҝҷдёҖжӯҘеҫҲз®ҖеҚ•пјҢзұ»дјјдәҺLoGз®—еӯҗпјҲLaplacian of GaussianпјүдҪңй«ҳж–ҜжЁЎзіҠдёҖж ·пјҢдё»иҰҒдҪңз”Ёе°ұжҳҜеҺ»йҷӨеҷӘеЈ°гҖӮеӣ дёәеҷӘеЈ°д№ҹйӣҶдёӯдәҺй«ҳйў‘дҝЎеҸ·пјҢеҫҲе®№жҳ“иў«иҜҶеҲ«дёәдјӘиҫ№зјҳгҖӮеә”з”Ёй«ҳж–ҜжЁЎзіҠеҺ»йҷӨеҷӘеЈ°пјҢйҷҚдҪҺдјӘиҫ№зјҳзҡ„иҜҶеҲ«гҖӮдҪҶжҳҜз”ұдәҺеӣҫеғҸиҫ№зјҳдҝЎжҒҜд№ҹжҳҜй«ҳйў‘дҝЎеҸ·пјҢй«ҳж–ҜжЁЎзіҠзҡ„еҚҠеҫ„йҖүжӢ©еҫҲйҮҚиҰҒпјҢиҝҮеӨ§зҡ„еҚҠеҫ„еҫҲе®№жҳ“и®©дёҖдәӣејұиҫ№зјҳжЈҖжөӢдёҚеҲ°гҖӮ
2. и®Ўз®—жўҜеәҰе№…еҖје’Ңж–№еҗ‘гҖӮ
еӣҫеғҸзҡ„иҫ№зјҳеҸҜд»ҘжҢҮеҗ‘дёҚеҗҢж–№еҗ‘пјҢеӣ жӯӨз»Ҹе…ёCannyз®—жі•з”ЁдәҶеӣӣдёӘжўҜеәҰз®—еӯҗжқҘеҲҶеҲ«и®Ўз®—ж°ҙе№іпјҢеһӮзӣҙе’ҢеҜ№и§’зәҝж–№еҗ‘зҡ„жўҜеәҰгҖӮдҪҶжҳҜйҖҡеёёйғҪдёҚз”ЁеӣӣдёӘжўҜеәҰз®—еӯҗжқҘеҲҶеҲ«и®Ўз®—еӣӣдёӘж–№еҗ‘гҖӮеёёз”Ёзҡ„иҫ№зјҳе·®еҲҶз®—еӯҗпјҲеҰӮRoberпјҢPrewittпјҢSobelпјүи®Ўз®—ж°ҙе№іе’ҢеһӮзӣҙж–№еҗ‘зҡ„е·®еҲҶGxе’ҢGyгҖӮиҝҷж ·е°ұеҸҜд»ҘеҰӮдёӢи®Ўз®—жўҜеәҰжЁЎе’Ңж–№еҗ‘пјҡ
жўҜеәҰи§’еәҰ Оё иҢғеӣҙд»Һеј§еәҰ -ПҖ еҲ° ПҖпјҢ然еҗҺжҠҠе®ғиҝ‘дјјеҲ°еӣӣдёӘж–№еҗ‘пјҢеҲҶеҲ«д»ЈиЎЁж°ҙе№іпјҢеһӮзӣҙе’ҢдёӨдёӘеҜ№и§’зәҝж–№еҗ‘пјҲ0В°,45В°,90В°,135В°пјүгҖӮеҸҜд»Ҙд»ҘВұiПҖ/8пјҲi=1,3,5,7пјүеҲҶеүІпјҢиҗҪеңЁжҜҸдёӘеҢәеҹҹзҡ„жўҜеәҰи§’з»ҷдёҖдёӘзү№е®ҡеҖјпјҢд»ЈиЎЁеӣӣдёӘж–№еҗ‘д№ӢдёҖгҖӮ
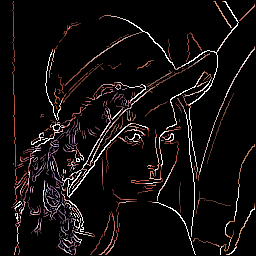
иҝҷйҮҢжҲ‘йҖүжӢ©Sobelз®—еӯҗи®Ўз®—жўҜеәҰгҖӮSobelз®—жі•еҫҲз®ҖеҚ•пјҢеҲ°еӨ„йғҪеҸҜд»ҘжүҫеҲ°пјҢе°ұдёҚеҲ—еҮәд»Јз ҒжқҘдәҶгҖӮзӣёеҜ№дәҺе…¶д»–иҫ№зјҳз®—еӯҗпјҢSobelз®—еӯҗеҫ—еҮәжқҘзҡ„иҫ№зјҳзІ—еӨ§жҳҺдә®гҖӮ

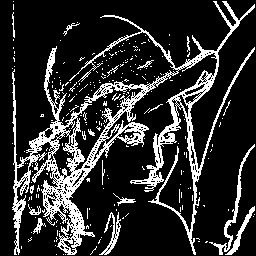
дёӢеӣҫжҳҜеҜ№дёҠйқўеҚҠеҫ„2зҡ„й«ҳж–ҜжЁЎзіҠеӣҫеғҸLйҖҡйҒ“пјҲHSLпјүеә”з”ЁSobelз®—еӯҗзҡ„жўҜеәҰжЁЎеӣҫпјҢжІЎжңүж–ҪеҠ д»»дҪ•йҳҖеҖјгҖӮ

Sobelз®—еӯҗпјҢж— йҳҖеҖј
3. йқһжңҖеӨ§еҖјжҠ‘еҲ¶гҖӮ
йқһжңҖеӨ§еҖјжҠ‘еҲ¶жҳҜдёҖз§Қиҫ№зјҳз»ҶеҢ–ж–№жі•гҖӮйҖҡеёёеҫ—еҮәжқҘзҡ„жўҜеәҰиҫ№зјҳдёҚжӯўдёҖдёӘеғҸзҙ е®ҪпјҢиҖҢжҳҜеӨҡдёӘеғҸзҙ е®ҪгҖӮе°ұеғҸжҲ‘们жүҖиҜҙSobelз®—еӯҗеҫ—еҮәжқҘзҡ„иҫ№зјҳзІ—еӨ§иҖҢжҳҺдә®пјҢд»ҺдёҠйқўLenaеӣҫзҡ„Sobelз»“жһңеҸҜд»ҘзңӢеҫ—еҮәжқҘгҖӮеӣ жӯӨиҝҷж ·зҡ„жўҜеәҰеӣҫиҝҳжҳҜеҫҲвҖңжЁЎзіҠвҖқгҖӮиҖҢеҮҶеҲҷ3иҰҒжұӮпјҢиҫ№зјҳеҸӘжңүдёҖдёӘзІҫзЎ®зҡ„зӮ№е®ҪеәҰгҖӮйқһжңҖеӨ§еҖјжҠ‘еҲ¶иғҪеё®еҠ©дҝқз•ҷеұҖйғЁжңҖеӨ§жўҜеәҰиҖҢжҠ‘еҲ¶жүҖжңүе…¶д»–жўҜеәҰеҖјгҖӮиҝҷж„Ҹе‘ізқҖеҸӘдҝқз•ҷдәҶжўҜеәҰеҸҳеҢ–дёӯжңҖй”җеҲ©зҡ„дҪҚзҪ®гҖӮз®—жі•еҰӮдёӢпјҡ
жіЁж„ҸпјҢж–№еҗ‘зҡ„жӯЈиҙҹжҳҜдёҚиө·дҪңз”Ёзҡ„пјҢжҜ”еҰӮдёңеҚ—ж–№еҗ‘е’ҢиҘҝеҢ—ж–№еҗ‘жҳҜдёҖж ·зҡ„пјҢйғҪи®ӨдёәжҳҜеҜ№и§’зәҝзҡ„дёҖдёӘж–№еҗ‘гҖӮеүҚйқўжҲ‘们жҠҠжўҜеәҰж–№еҗ‘иҝ‘дјјеҲ°ж°ҙе№іпјҢеһӮзӣҙе’ҢдёӨдёӘеҜ№и§’зәҝеӣӣдёӘж–№еҗ‘пјҢжүҖд»ҘжҜҸдёӘеғҸзҙ ж №жҚ®иҮӘиә«ж–№еҗ‘еңЁиҝҷеӣӣдёӘж–№еҗ‘д№ӢдёҖиҝӣиЎҢжҜ”иҫғпјҢеҶіе®ҡжҳҜеҗҰдҝқз•ҷгҖӮиҝҷдёҖйғЁеҲҶзҡ„д»Јз Ғд№ҹеҫҲз®ҖеҚ•пјҢеҲ—еҮәеҰӮдёӢгҖӮpModuleпјҢpDirectionеҲҶеҲ«и®°еҪ•дәҶдёҠдёҖжӯҘжўҜеәҰжЁЎеҖје’ҢжўҜеәҰж–№еҗ‘гҖӮ
pmoddrow = pModule + Width + 1;
pdirdrow = pDirection + Width + 1;
pstrongdrow = pStrong + Width + 1;
for (i = 1; i < Hend - 1; i++)
{
гҖҖгҖҖpstrongd = pstrongdrow;
гҖҖгҖҖpmodd = pmoddrow;
гҖҖгҖҖpdird = pdirdrow;
гҖҖгҖҖfor (j = 1; j < Wend - 1; j++)
гҖҖгҖҖгҖҖгҖҖ{
гҖҖ switch (*pdird)
{
case 0: // x direction
case 4:
if (*pmodd > *(pmodd - 1) && *pmodd > *(pmodd + 1))
*pstrongd = 255;
break;
case 1: // northeast-southwest direction. Notice the data order on y direction of bmp data
case 5:
if (*pmodd > *(pmodd + Width + 1) && *pmodd > *(pmodd - Width - 1))
*pstrongd = 255;
break;
case 2: // y direction
case 6:
if (*pmodd > *(pmodd - Width) && *pmodd > *(pmodd + Width))
*pstrongd = 255;
break;
case 3: // northwest-southeast direction. Notice the data order on y direction of bmp data
case 7:
if (*pmodd > *(pmodd + Width - 1) && *pmodd > *(pmodd - Width + 1))
*pstrongd = 255;
break;
default:
ASSERT(0);
break;
}
pstrongd++;
pmodd++;
pdird++;
}
pstrongdrow += Width;
pmoddrow += Width;
pdirdrow += Width;
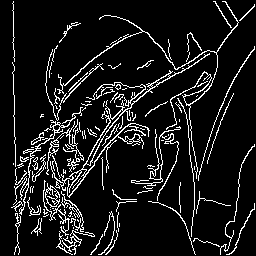
}дёӢеӣҫжҳҜйқһжңҖеӨ§еҖјжҠ‘еҲ¶зҡ„з»“жһңгҖӮеҸҜи§Ғиҫ№зјҳе®ҪеәҰе·Із»ҸеӨ§еӨ§еҮҸе°ҸгҖӮдҪҶжҳҜиҝҷдёӘеӣҫеғҸдёӯеӣ дёәжІЎжңүеә”з”Ёд»»дҪ•йҳҖеҖјпјҢиҝҳеҗ«жңүеӨ§йҮҸе°ҸжўҜеәҰжЁЎеҖјзҡ„зӮ№пјҢд№ҹе°ұжҳҜеӣҫдёӯеҫҲжҡ—зҡ„ең°ж–№гҖӮдёӢйқўпјҢйҳҖеҖјиҰҒдёҠеңәдәҶгҖӮ

йқһжңҖеӨ§еҖјжҠ‘еҲ¶з»“жһң
4. еҸҢйҳҖеҖјгҖӮ
дёҖиҲ¬зҡ„иҫ№зјҳжЈҖжөӢз®—жі•з”ЁдёҖдёӘйҳҖеҖјжқҘж»ӨйҷӨеҷӘеЈ°жҲ–йўңиүІеҸҳеҢ–еј•иө·зҡ„е°Ҹзҡ„жўҜеәҰеҖјпјҢиҖҢдҝқз•ҷеӨ§зҡ„жўҜеәҰеҖјгҖӮCannyз®—жі•еә”з”ЁеҸҢйҳҖеҖјпјҢеҚідёҖдёӘй«ҳйҳҖеҖје’ҢдёҖдёӘдҪҺйҳҖеҖјжқҘеҢәеҲҶиҫ№зјҳеғҸзҙ гҖӮеҰӮжһңиҫ№зјҳеғҸзҙ зӮ№жўҜеәҰеҖјеӨ§дәҺй«ҳйҳҖеҖјпјҢеҲҷиў«и®ӨдёәжҳҜејәиҫ№зјҳзӮ№гҖӮеҰӮжһңиҫ№зјҳжўҜеәҰеҖје°ҸдәҺй«ҳйҳҖеҖјпјҢеӨ§дәҺдҪҺйҳҖеҖјпјҢеҲҷж Үи®°дёәејұиҫ№зјҳзӮ№гҖӮе°ҸдәҺдҪҺйҳҖеҖјзҡ„зӮ№еҲҷиў«жҠ‘еҲ¶жҺүгҖӮиҝҷдёҖжӯҘз®—жі•еҫҲз®ҖеҚ•гҖӮ
5. ж»һеҗҺиҫ№з•Ңи·ҹиёӘгҖӮ
иҮіжӯӨпјҢејәиҫ№зјҳзӮ№еҸҜд»Ҙи®ӨдёәжҳҜзңҹзҡ„иҫ№зјҳгҖӮејұиҫ№зјҳзӮ№еҲҷеҸҜиғҪжҳҜзңҹзҡ„иҫ№зјҳпјҢд№ҹеҸҜиғҪжҳҜеҷӘеЈ°жҲ–йўңиүІеҸҳеҢ–еј•иө·зҡ„гҖӮдёәеҫ—еҲ°зІҫзЎ®зҡ„з»“жһңпјҢеҗҺиҖ…еј•иө·зҡ„ејұиҫ№зјҳзӮ№еә”иҜҘеҺ»жҺүгҖӮйҖҡеёёи®Өдёәзңҹе®һиҫ№зјҳеј•иө·зҡ„ејұиҫ№зјҳзӮ№е’Ңејәиҫ№зјҳзӮ№жҳҜиҝһйҖҡзҡ„пјҢиҖҢз”ұеҷӘеЈ°еј•иө·зҡ„ејұиҫ№зјҳзӮ№еҲҷдёҚдјҡгҖӮжүҖи°“зҡ„ж»һеҗҺиҫ№з•Ңи·ҹиёӘз®—жі•жЈҖжҹҘдёҖдёӘејұиҫ№зјҳзӮ№зҡ„8иҝһйҖҡйўҶеҹҹеғҸзҙ пјҢеҸӘиҰҒжңүејәиҫ№зјҳзӮ№еӯҳеңЁпјҢйӮЈд№ҲиҝҷдёӘејұиҫ№зјҳзӮ№иў«и®ӨдёәжҳҜзңҹзҡ„иҫ№зјҳдҝқз•ҷдёӢжқҘгҖӮ
иҝҷдёӘз®—жі•жҗңзҙўжүҖжңүиҝһйҖҡзҡ„ејұиҫ№зјҳпјҢеҰӮжһңдёҖжқЎиҝһйҖҡзҡ„ејұиҫ№зјҳзҡ„д»»дҪ•дёҖдёӘзӮ№е’Ңејәиҫ№зјҳзӮ№иҝһйҖҡпјҢеҲҷдҝқз•ҷиҝҷжқЎејұиҫ№зјҳпјҢеҗҰеҲҷжҠ‘еҲ¶иҝҷжқЎејұиҫ№зјҳгҖӮжҗңзҙўж—¶еҸҜд»Ҙз”Ёе№ҝеәҰдјҳе…ҲжҲ–иҖ…ж·ұеәҰдјҳе…Ҳз®—жі•пјҢжҲ‘еңЁиҝҷйҮҢе®һзҺ°дәҶеә”иҜҘжҳҜжңҖе®№жҳ“зҡ„ж·ұеәҰдјҳе…Ҳз®—жі•гҖӮдёҖж¬ЎиҝһйҖҡдёҖжқЎиҫ№зјҳзҡ„ж·ұеәҰдјҳе…Ҳз®—жі•еҰӮдёӢпјҡ
pmoddrow = pModule + Width + 1;
pdirdrow = pDirection + Width + 1;
pstrongdrow = pStrong + Width + 1;
for (i = 1; i < Hend - 1; i++)
{
гҖҖгҖҖpstrongd = pstrongdrow;
гҖҖгҖҖpmodd = pmoddrow;
гҖҖгҖҖpdird = pdirdrow;
гҖҖгҖҖfor (j = 1; j < Wend - 1; j++)
гҖҖгҖҖгҖҖгҖҖ{
гҖҖ switch (*pdird)
{
case 0: // x direction
case 4:
if (*pmodd > *(pmodd - 1) && *pmodd > *(pmodd + 1))
*pstrongd = 255;
break;
case 1: // northeast-southwest direction. Notice the data order on y direction of bmp data
case 5:
if (*pmodd > *(pmodd + Width + 1) && *pmodd > *(pmodd - Width - 1))
*pstrongd = 255;
break;
case 2: // y direction
case 6:
if (*pmodd > *(pmodd - Width) && *pmodd > *(pmodd + Width))
*pstrongd = 255;
break;
case 3: // northwest-southeast direction. Notice the data order on y direction of bmp data
case 7:
if (*pmodd > *(pmodd + Width - 1) && *pmodd > *(pmodd - Width + 1))
*pstrongd = 255;
break;
default:
ASSERT(0);
break;
}
pstrongd++;
pmodd++;
pdird++;
}
pstrongdrow += Width;
pmoddrow += Width;
pdirdrow += Width;
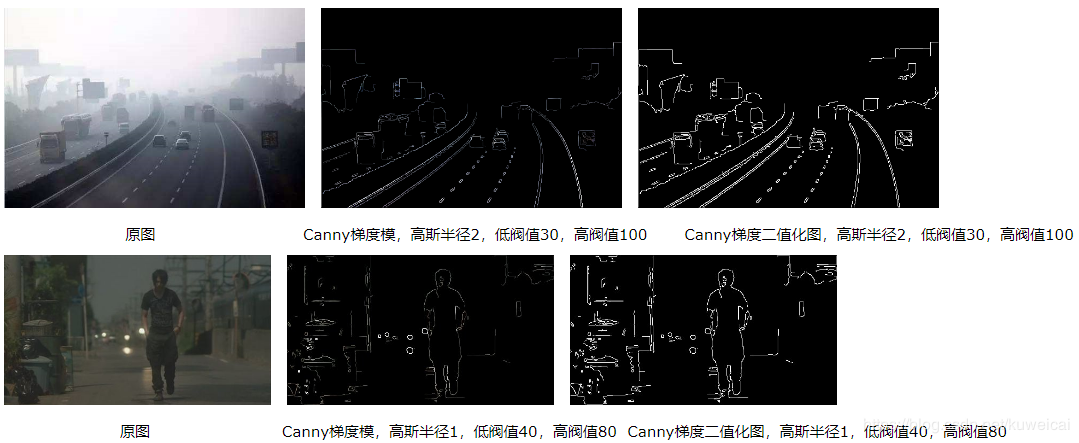
}дёӢйқўжҳҜеҜ№Lenaеӣҫи®Ўз®—Cannyиҫ№зјҳжЈҖжөӢзҡ„жўҜеәҰжЁЎеӣҫе’ҢдәҢеҖјеҢ–еӣҫпјҢй«ҳж–ҜеҚҠеҫ„2пјҢй«ҳйҳҖеҖј100пјҢдҪҺйҳҖеҖј50гҖӮ
CannyжЈҖжөӢжўҜеәҰжЁЎеӣҫ CannyжЈҖжөӢжўҜеәҰдәҢеҖјеӣҫ
дҪңдёәеҜ№жҜ”пјҢдёӢйқўжҳҜз”ЁдёҖйҳ¶е·®еҲҶе’ҢSobelз®—еӯҗеҜ№еҺҹеӣҫи®Ўз®—зҡ„з»“жһңпјҢйҳҖеҖј100гҖӮз”ұдәҺдёҖйҳ¶е·®еҲҶзҡ„жўҜеәҰеҖјзӣёеҜ№иҫғе°ҸпјҢжҲ‘еҜ№дёҖйҳ¶е·®еҲҶзҡ„жўҜеәҰеҖјж”ҫеӨ§дәҶдёҖе®ҡеҖҚж•°пјҢдҪҝеҫ—е®ғе’ҢSobelзҡ„жўҜеәҰеҖјдҝқжҢҒеҗҢж ·зҡ„ж°ҙе№ігҖӮ


дёҖйҳ¶е·®еҲҶжўҜеәҰжЁЎеӣҫ дёҖйҳ¶е·®еҲҶжўҜеәҰдәҢеҖјеӣҫ

SobelжўҜеәҰжЁЎеӣҫ SobelжўҜеәҰдәҢеҖјеӣҫ
еҫҲжҳҺжҳҫпјҢCannyиҫ№зјҳжЈҖжөӢзҡ„ж•ҲжһңжҳҜеҫҲжҳҫи‘—зҡ„гҖӮзӣёжҜ”жҷ®йҖҡзҡ„жўҜеәҰз®—жі•еӨ§еӨ§жҠ‘еҲ¶дәҶеҷӘеЈ°еј•иө·зҡ„дјӘиҫ№зјҳпјҢиҖҢдё”жҳҜз»ҶеҢ–иҝҮзҡ„иҫ№зјҳпјҢжҳ“дәҺеҗҺз»ӯеӨ„зҗҶгҖӮеҜ№дәҺеҜ№жҜ”еәҰиҫғдҪҺзҡ„еӣҫеғҸпјҢйҖҡиҝҮи°ғиҠӮеҸӮж•°пјҢCannyз®—жі•д№ҹиғҪжңүеҫҲеҘҪзҡ„ж•ҲжһңгҖӮ
зңӢе®ҢиҝҷзҜҮе…ідәҺеҰӮдҪ•е®һзҺ°python Cannyиҫ№зјҳжЈҖжөӢз®—жі•зҡ„ж–Үз« пјҢеҰӮжһңи§үеҫ—ж–Үз« еҶ…е®№еҶҷеҫ—дёҚй”ҷзҡ„иҜқпјҢеҸҜд»ҘжҠҠе®ғеҲҶдә«еҮәеҺ»з»ҷжӣҙеӨҡдәәзңӢеҲ°гҖӮ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ