您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
本文小编为大家详细介绍“Python OpenCV Canny边缘检测算法如何实现”,内容详细,步骤清晰,细节处理妥当,希望这篇“Python OpenCV Canny边缘检测算法如何实现”文章能帮助大家解决疑惑,下面跟着小编的思路慢慢深入,一起来学习新知识吧。
总的来说,Canny边缘检测可以分为四个步骤:
由于边缘检测对噪声敏感,因此对图像应用高斯平滑以帮助减少噪声。
具体做法是,采用一个5*5的高斯平滑滤波器对图像进行滤波处理。
对平滑后的图像,在水平、垂直两个方向上使用Sobel算子(如下图)计算梯度大小,得到两个方向上的一阶导数Gx与Gy。
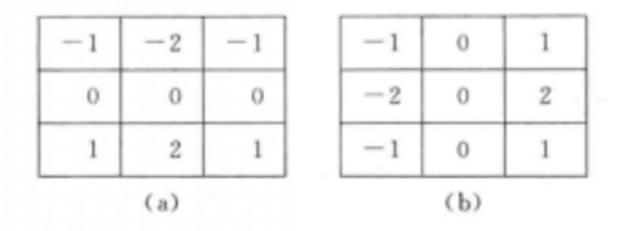
在得到两个方向上的梯度之后,对这两个向量求和,得到这一点处的梯度大小与方向。
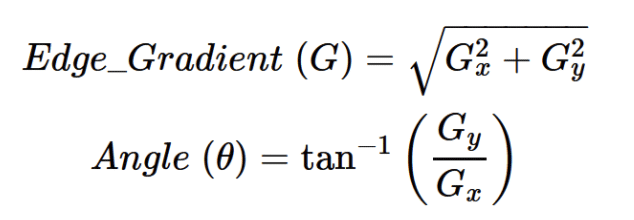
采用四舍五入,将梯度方向确定为上下左右与四个对角线方向之一(45°的倍数)。
在得到梯度大小与方向之后,对图像进一步扫描,去除不构成边缘的不重要的像素信息,这里采用的方法是非极大值抑制——在每个像素处,检查像素是否在其梯度方向的邻域中是局部最大值,只保留局部最大值的梯度。
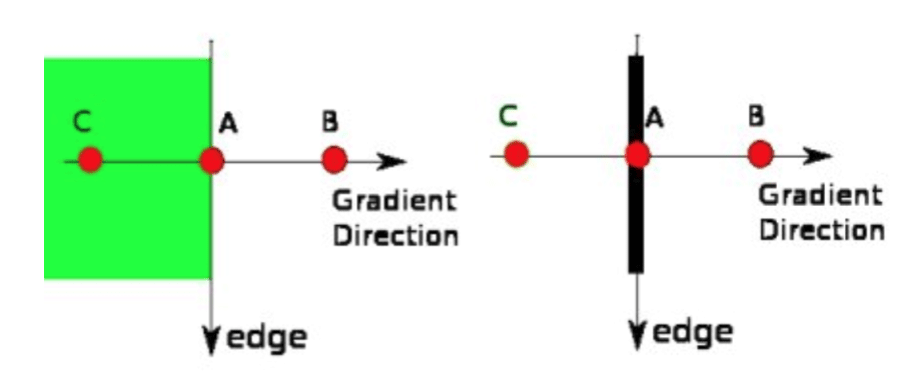
在上图中,点A位于边缘上。梯度方向与边缘方向垂直。为了确定要不要保留A点作为边缘,需要将A点处的梯度大小与B、C两点的梯度大小比较,如果A点的梯度大小不是局部最大,则将该点抑制。
因此,从结果上讲,NMS其实是将B、C两点抑制了,它们不会出现在结果中,因此这一步的效果是“thin edges”。
定义上界与下界两个阈值,并规定:
任何梯度强度大于上界的像素都是边;
任何梯度强度小于下界的像素都不是边;
任何梯度介于两个阈值之间的可能是边,此时考察它们的连通性,如果它们和第一种情况(确定是边缘的像素)相连接,就认为它们是边缘,否则认为它们不是边缘。
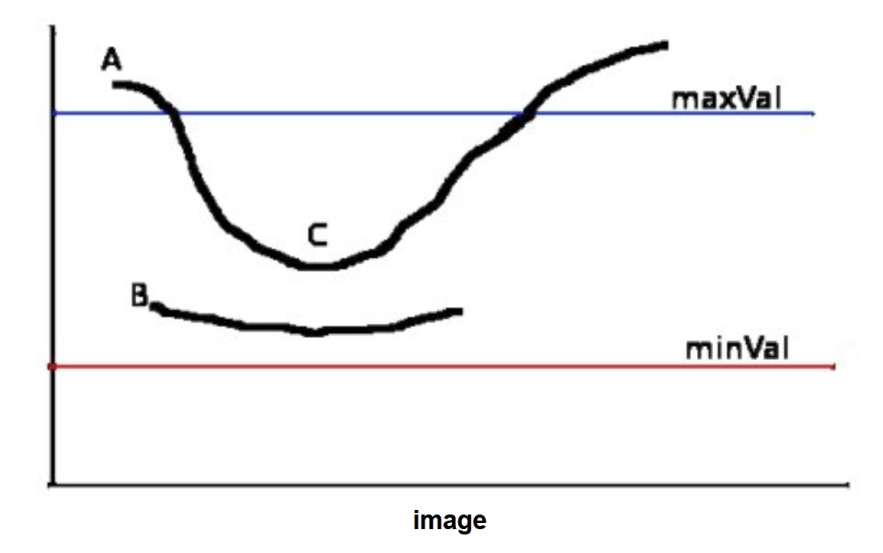
在上图中,A点在maxVal阈值之上,确定是边缘。C介于两个阈值之间,但与A相连,因此它也是边缘。B介于两个阈值之间,它所在的曲线上并没有任何像素点的梯度强度在maxVal之上,因此它不是边缘。
需要指出的是,上面四步操作之后得到的是strong edges。
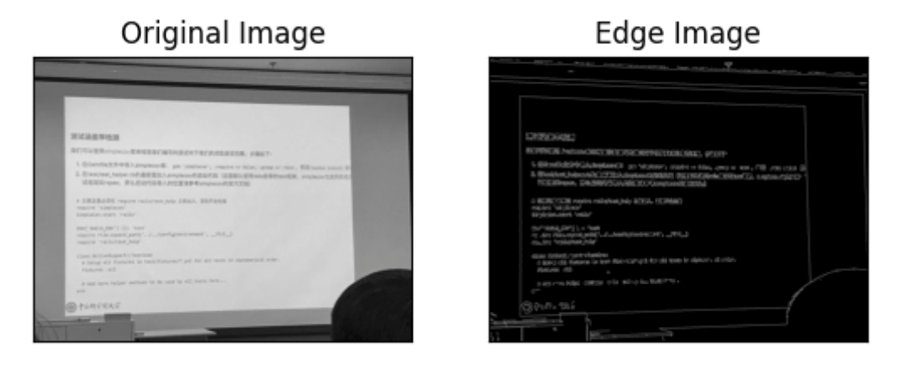
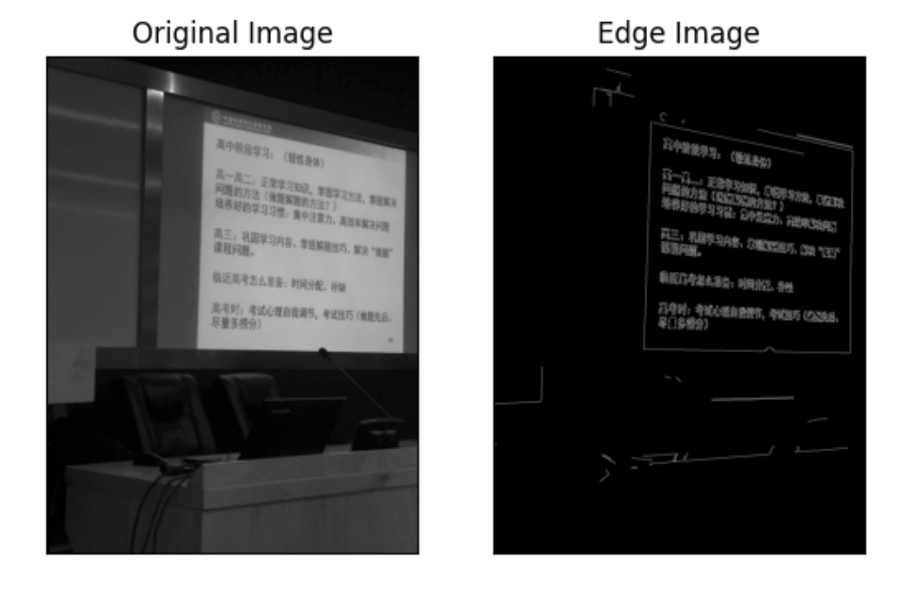
OpenCV提供了cv.Canny()方法,该方法将输入的原始图像转换为边缘图像。
该方法的原型为:
cv.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient]]]) -> edges cv.Canny(dx, dy, threshold1, threshold2[, edges[, L2gradient]]) -> edges
image参数是array格式的输入图像。threshold1与threshold2分别是我们的下界阈值与上界阈值。apertureSize是用于查找图像梯度的Sobel核的大小,默认为3。L2gradient指定了求梯度幅值的公式,是一个布尔型变量,默认为False。当它为True时,使用L2,否则使用L1。
下面是具体代码:
def canny_detect(image_path, show=True):
# 读取图像
image = cv2.imread(image_path, 0)
# 获取结果
edges = cv2.Canny(image, 100, 200)
if show:
# 绘制原图
plt.subplot(121)
plt.imshow(image, cmap='gray')
plt.title('Original Image')
plt.xticks([])
plt.yticks([])
# 绘制边缘图
plt.subplot(122)
plt.imshow(edges, cmap='gray')
plt.title('Edge Image')
plt.xticks([])
plt.yticks([])
plt.show()
return edges
canny_detect('images/2.jpeg')效果:
读到这里,这篇“Python OpenCV Canny边缘检测算法如何实现”文章已经介绍完毕,想要掌握这篇文章的知识点还需要大家自己动手实践使用过才能领会,如果想了解更多相关内容的文章,欢迎关注亿速云行业资讯频道。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。