жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
иҝҷзҜҮж–Үз« е°ҶдёәеӨ§е®¶иҜҰз»Ҷи®Іи§Јжңүе…іжҖҺд№ҲеҲ©з”Ёpythonе®һзҺ°ARпјҢе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еҒҡдёӘеҸӮиҖғпјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« еҗҺеҸҜд»ҘжңүжүҖ收иҺ·гҖӮ
еӨ§иҮҙжӯҘйӘӨеҰӮдёӢпјҡ
иҜҶеҲ«еҸӮиҖғе№ійқў
еңЁиҝҷдёҖжӯҘдёӯпјҢжҲ‘们жүҖйңҖиҰҒеҒҡзҡ„дәӢе°ұжҳҜжҸҗеҸ–еҸӮиҖғеӣҫеғҸе’Ңзӣ®ж ҮеӣҫеғҸзҡ„siftзү№еҫҒпјҢ然еҗҺдҪҝз”ЁRANSACз®—жі•зЁіеҒҘең°дј°и®ЎеҚ•еә”жҖ§зҹ©йҳөгҖӮ
д»Јз ҒеҰӮдёӢ:
#и®Ўз®—зү№еҫҒ
sift.process_image('D:иҫ“е…ҘеӣҫзүҮ/book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('D:иҫ“е…ҘеӣҫзүҮ/book_per.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
#еҢ№й…Қзү№еҫҒпјҢ并计算еҚ•еә”жҖ§зҹ©йҳө
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)з”ұдёҠйқўд»Јз ҒеҸҜеҫ—еҲ°еҚ•еә”жҖ§зҹ©йҳөпјҢе®ғиғҪеӨҹе°ҶдёҖе№…еӣҫеғҸдёӯж Үи®°зү©зҡ„зӮ№жҳ е°„еҲ°еҸҰдёҖе№…еӣҫеғҸдёӯзҡ„еҜ№еә”зӮ№гҖӮиҝҳйңҖиҰҒе»әз«ӢX-Y(Z=0)дёүз»ҙеқҗж Үзі»пјҢж Үи®°зү©еңЁZ=0е№ійқўдёҠпјҢеҺҹзӮ№еңЁж Үи®°зү©зҡ„жҹҗдёӘдҪҚзҪ®дёҠгҖӮ
д»ҺеҚ•еә”жҖ§жҺЁеҜјеҮәд»ҺеҸӮиҖғйқўеқҗж Үзі»еҲ°зӣ®ж ҮеӣҫеғҸеқҗж Үзі»зҡ„иҪ¬жҚў
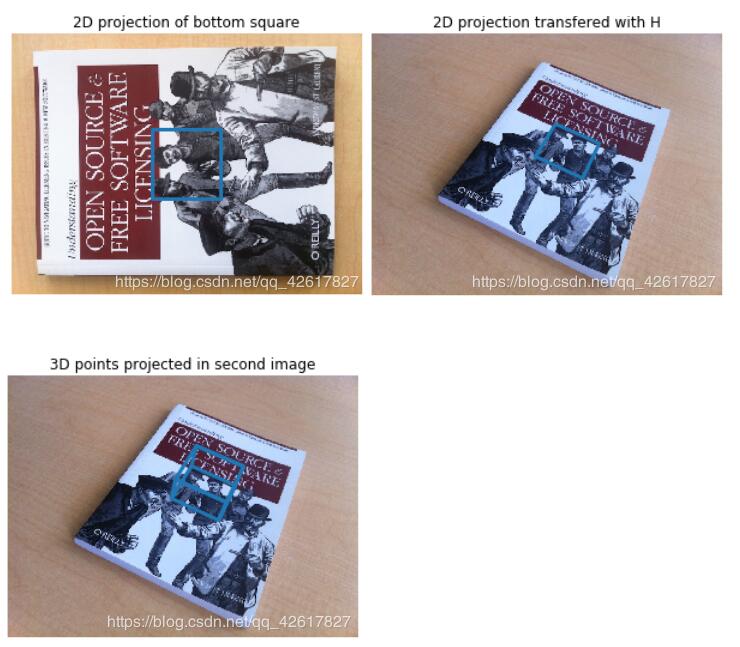
еңЁиҝӣиЎҢеқҗж ҮиҪ¬жҚўд№ӢеүҚпјҢдёәдәҶжЈҖйӘҢеҚ•еә”жҖ§зҹ©йҳөз»“жһңзҡ„жӯЈзЎ®жҖ§пјҢйңҖиҰҒе°ҶдёҖдәӣдёүз»ҙзү©дҪ“ж”ҫзҪ®еңЁзӣ®ж ҮеӣҫеғҸдёҠпјҢжң¬е®һйӘҢдҪҝз”ЁдәҶдёҖдёӘз«Ӣж–№дҪ“гҖӮдә§з”ҹз«Ӣж–№дҪ“зҡ„д»Јз ҒеҰӮдёӢ:
def cube_points(c, wid): p = [] p.append([c[0]-wid, c[1]-wid, c[2]-wid]) p.append([c[0]-wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]-wid, c[2]-wid]) p.append([c[0]-wid, c[1]-wid, c[2]-wid]) p.append([c[0]-wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]+wid, c[2]+wid]) p.append([c[0]+wid, c[1]+wid, c[2]+wid]) p.append([c[0]+wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]+wid, c[2]+wid]) p.append([c[0]-wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]+wid, c[2]+wid]) p.append([c[0]+wid, c[1]-wid, c[2]+wid]) p.append([c[0]+wid, c[1]-wid, c[2]-wid] return array(p).T
е…Ҳи®Ўз®—еҮәз…§зӣёжңәзҡ„ж Үе®ҡзҹ©йҳөпјҢе°ұеҸҜд»Ҙеҫ—еҮәдёӨдёӘи§Ҷеӣҫй—ҙзҡ„зӣёеҜ№еҸҳжҚў
д»Јз ҒеҰӮдёӢ:
#и®Ўз®—з…§зӣёжңәж Үе®ҡзҹ©йҳөпјҢдҪҝз”ЁеӣҫеғҸзҡ„еҲҶиҫЁзҺҮдёә747*1000 K = my_calibration((747, 1000)) #дҪҚдәҺиҫ№й•ҝдёә0.2пјҢZ=0е№ійқўдёҠзҡ„дёүз»ҙзӮ№ box = cube_points([0, 0, 0.1], 0.1) #жҠ•еҪұ第дёҖе№…еӣҫеғҸдёҠеә•йғЁзҡ„жӯЈж–№еҪў cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]]))))) #еә•йғЁжӯЈж–№еҪўдёҠзҡ„зӮ№ box_cam1 = cam1.project(homography.make_homog(box[:, :5])) #дҪҝз”ЁHе°ҶзӮ№еҸҳжҚўеҲ°з¬¬дәҢе№…еӣҫеғҸдёҠ box_trans = homography.normalize(dot(H,box_cam1)) #д»Һcam1е’ҢHдёӯ计算第дәҢдёӘз…§зӣёжңәзҹ©йҳө cam2 = camera.Camera(dot(H, cam1.P)) A = dot(linalg.inv(K), cam2.P[:, :3]) A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T cam2.P[:, :3] = dot(K, A) #дҪҝ用第дәҢдёӘз…§зӣёжңәзҹ©йҳөжҠ•еҪұ box_cam2 = cam2.project(homography.make_homog(box))
еңЁеӣҫеғҸпјҲеғҸзҙ з©әй—ҙпјүдёӯжҠ•еҪұжҲ‘们зҡ„3DжЁЎеһӢ并з»ҳеҲ¶е®ғгҖӮ
#еә•йғЁжӯЈж–№еҪўзҡ„дәҢз»ҙжҠ•еҪұ
figure()
imshow(im0)
plot(box_cam1[0, :], box_cam1[1, :], linewidth=3)
title('2D projection of bottom square')
axis('off')
#дҪҝз”ЁHеҜ№дәҢз»ҙжҠ•еҪұиҝӣиЎҢеҸҳжҚў
figure()
imshow(im1)
plot(box_trans[0, :], box_trans[1, :], linewidth=3)
title('2D projection transfered with H')
axis('off')
#дёүз»ҙз«Ӣж–№дҪ“
figure()
imshow(im1)
plot(box_cam2[0, :], box_cam2[1, :], linewidth=3)
title('3D points projected in second image')
axis('off')е®һйӘҢз»“жһңеҰӮдёӢ
д»Җд№ҲжҳҜAR
ARе…Ёз§°Augmented RealityпјҢж„ҸдёәеўһејәзҺ°е®һжҠҖжңҜгҖӮ
е®ғжҳҜдёҖз§Қе°Ҷзңҹе®һдё–з•ҢдҝЎжҒҜе’ҢиҷҡжӢҹдё–з•ҢдҝЎжҒҜвҖңж— зјқвҖқйӣҶжҲҗзҡ„ж–°жҠҖжңҜпјҢжҳҜжҠҠеҺҹжң¬еңЁзҺ°е®һдё–з•Ңзҡ„дёҖе®ҡж—¶й—ҙз©әй—ҙиҢғеӣҙеҶ…еҫҲйҡҫдҪ“йӘҢеҲ°зҡ„е®һдҪ“дҝЎжҒҜпјҲи§Ҷи§үдҝЎжҒҜпјҢеЈ°йҹіпјҢе‘ійҒ“пјҢи§Ұи§үзӯүпјүпјҢйҖҡиҝҮз”өи„‘зӯү科еӯҰжҠҖжңҜпјҢжЁЎжӢҹд»ҝзңҹеҗҺеҶҚеҸ еҠ пјҢе°ҶиҷҡжӢҹзҡ„дҝЎжҒҜеә”з”ЁеҲ°зңҹе®һдё–з•ҢпјҢиў«дәәзұ»ж„ҹе®ҳжүҖж„ҹзҹҘпјҢд»ҺиҖҢиҫҫеҲ°и¶…и¶ҠзҺ°е®һзҡ„ж„ҹе®ҳдҪ“йӘҢгҖӮзңҹе®һзҡ„зҺҜеўғе’ҢиҷҡжӢҹзҡ„зү©дҪ“е®һж—¶ең°еҸ еҠ еҲ°дәҶеҗҢдёҖдёӘз”»йқўжҲ–з©әй—ҙеҗҢж—¶еӯҳеңЁгҖӮ
еўһејәзҺ°е®һжҠҖжңҜпјҢдёҚд»…еұ•зҺ°дәҶзңҹе®һдё–з•Ңзҡ„дҝЎжҒҜпјҢиҖҢдё”е°ҶиҷҡжӢҹзҡ„дҝЎжҒҜеҗҢж—¶жҳҫзӨәеҮәжқҘпјҢдёӨз§ҚдҝЎжҒҜзӣёдә’иЎҘе……гҖҒеҸ еҠ гҖӮеңЁи§Ҷи§үеҢ–зҡ„еўһејәзҺ°е®һдёӯпјҢз”ЁжҲ·еҲ©з”ЁеӨҙзӣ”жҳҫзӨәеҷЁпјҢжҠҠзңҹе®һдё–з•ҢдёҺз”өи„‘еӣҫеҪўеӨҡйҮҚеҗҲжҲҗеңЁдёҖиө·пјҢдҫҝеҸҜд»ҘзңӢеҲ°зңҹе®һзҡ„дё–з•Ңеӣҙз»•зқҖе®ғгҖӮ
еўһејәзҺ°е®һжҠҖжңҜеҢ…еҗ«дәҶеӨҡеӘ’дҪ“гҖҒдёүз»ҙе»әжЁЎгҖҒе®һж—¶и§Ҷйў‘жҳҫзӨәеҸҠжҺ§еҲ¶гҖҒеӨҡдј ж„ҹеҷЁиһҚеҗҲгҖҒе®һж—¶и·ҹиёӘеҸҠжіЁеҶҢгҖҒеңәжҷҜиһҚеҗҲзӯүж–°жҠҖжңҜдёҺж–°жүӢж®өгҖӮеўһејәзҺ°е®һжҸҗдҫӣдәҶеңЁдёҖиҲ¬жғ…еҶөдёӢпјҢдёҚеҗҢдәҺдәәзұ»еҸҜд»Ҙж„ҹзҹҘзҡ„дҝЎжҒҜгҖӮ
еҰӮдҪ•еҲ©з”Ёpythonе®һзҺ°AR
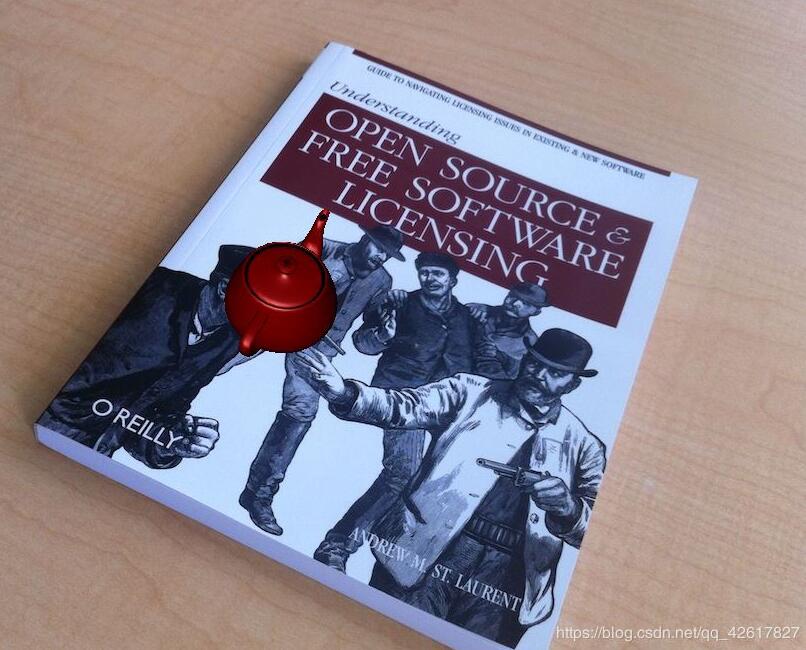
жӯҘйӘӨе’Ңе®һзҺ°е§ҝжҖҒдј°и®Ўж— еӨӘеӨ§е·®еҲ«гҖӮз”ұдёҠиҝ°еҶ…е®№и®Ўз®—еҮәз…§зӣёжңәзҡ„дҪҚзҪ®е’Ңе§ҝжҖҒпјҢдҪҝз”ЁиҝҷдәӣдҝЎжҒҜжқҘж”ҫзҪ®и®Ўз®—жңәеӣҫеғҸеӯҰжЁЎеһӢгҖӮиҝҷйҮҢжҲ‘们ж”ҫзҪ®дәҶдёҖдёӘзәўиүІзҡ„е°ҸиҢ¶еЈ¶гҖӮ
еңЁиҝҗиЎҢд»Јз Ғд№ӢеүҚпјҢжҲ‘们йңҖиҰҒе…Ҳе®үиЈ…PyGameе’ҢPyOpenGLпјҢдёӢиҪҪй“ҫжҺҘ(https://www.lfd.uci.edu/~gohlke/pythonlibs/)гҖӮ
ж ёеҝғд»Јз ҒеҰӮдёӢ:
def set_projection_from_camera(K):
#д»Һз…§зӣёжңәж Үе®ҡзҹ©йҳөдёӯиҺ·еҫ—и§Ҷеӣҫ
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
fx = K[0,0]
fy = K[1,1]
fovy = 2*math.atan(0.5*height/fy)*180/math.pi
aspect = (width*fy)/(height*fx)
near = 0.1
far = 100.0
gluPerspective(fovy,aspect,near,far)
glViewport(0,0,width,height)
def set_modelview_from_camera(Rt):
#д»Һз…§зӣёжңәе§ҝжҖҒдёӯиҺ·еҸ–жЁЎжӢҹи§Ҷеӣҫзҹ©йҳө
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
Rx = np.array([[1,0,0],[0,0,-1],[0,1,0]])
R = Rt[:,:3]
U,S,V = np.linalg.svd(R)
R = np.dot(U,V)
R[0,:] = -R[0,:]
t = Rt[:,3]
M = np.eye(4)
M[:3,:3] = np.dot(R,Rx)
M[:3,3] = t
M = M.T
m = M.flatten()
glLoadMatrixf(m)
def draw_background(imname):
#дҪҝз”Ёеӣӣиҫ№еҪўз»ҳеҲ¶иғҢжҷҜеӣҫеғҸ
bg_image = pygame.image.load(imname).convert()
bg_data = pygame.image.tostring(bg_image,"RGBX",1)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glEnable(GL_TEXTURE_2D)
glBindTexture(GL_TEXTURE_2D,glGenTextures(1))
glTexImage2D(GL_TEXTURE_2D,0,GL_RGBA,width,height,0,GL_RGBA,GL_UNSIGNED_BYTE,bg_data)
glTexParameterf(GL_TEXTURE_2D,GL_TEXTURE_MAG_FILTER,GL_NEAREST)
glTexParameterf(GL_TEXTURE_2D,GL_TEXTURE_MIN_FILTER,GL_NEAREST)
glBegin(GL_QUADS)
glTexCoord2f(0.0,0.0); glVertex3f(-1.0,-1.0,-1.0)
glTexCoord2f(1.0,0.0); glVertex3f( 1.0,-1.0,-1.0)
glTexCoord2f(1.0,1.0); glVertex3f( 1.0, 1.0,-1.0)
glTexCoord2f(0.0,1.0); glVertex3f(-1.0, 1.0,-1.0)
glEnd()
glDeleteTextures(1)
def draw_teapot(size):
#еңЁеҺҹзӮ№еӨ„з»ҳеҲ¶зәўиүІиҢ¶еЈ¶
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glClear(GL_DEPTH_BUFFER_BIT)
glMaterialfv(GL_FRONT,GL_AMBIENT,[0,0,0,0])
glMaterialfv(GL_FRONT,GL_DIFFUSE,[0.5,0.0,0.0,0.0])
glMaterialfv(GL_FRONT,GL_SPECULAR,[0.7,0.6,0.6,0.0])
glMaterialf(GL_FRONT,GL_SHININESS,0.25*128.0)
glutSolidTeapot(size)
width,height = 1000,747
def setup():
pygame.init()
pygame.display.set_mode((width,height),OPENGL | DOUBLEBUF)
pygame.display.set_caption("OpenGL AR demo")е®һйӘҢз»“жһңеҰӮеӣҫпјҡ
иҝҗиЎҢд»Јз ҒйҒҮеҲ°зҡ„й”ҷиҜҜеҸҠи§ЈеҶіж–№жЎҲ
й”ҷиҜҜеҰӮдёӢ:An error ocurred while starting the kernelfreeglut ERROR: Function called without first calling вҖҳglutInit'.
еҺҹеӣ пјҡз»ҸеӨ§зҘһжҢҮзӮ№еҫ—зҹҘиҝҷдёӘй”ҷиҜҜжҳҜfreeglutе’Ңglutе…ұеӯҳзҡ„зјҳж•…пјҢе®ғ们дҝ©е®ҡд№үдәҶзӣёеҗҢзҡ„ж–№жі•пјҢиҝҷдёӘжҳҜеҠЁжҖҒй“ҫжҺҘеә“зҡ„йҮҚеҸ й—®йўҳпјҢжҲ‘зҡ„еңЁana\Lib\site-packages\OpenGL\DLLSж–Ү件еӨ№йҮҢйқўгҖӮ
дҪ йңҖиҰҒеҲ йҷӨfreeglut.vc15.dllиҝҷдёӘж–Ү件гҖӮжҲ‘иҝҷжҳҜе·Із»ҸеҲ йҷӨе®Ңзҡ„ж ·еӯҗгҖӮ
е…ідәҺвҖңжҖҺд№ҲеҲ©з”Ёpythonе®һзҺ°ARвҖқиҝҷзҜҮж–Үз« е°ұеҲҶдә«еҲ°иҝҷйҮҢдәҶпјҢеёҢжңӣд»ҘдёҠеҶ…е®№еҸҜд»ҘеҜ№еӨ§е®¶жңүдёҖе®ҡзҡ„её®еҠ©пјҢдҪҝеҗ„дҪҚеҸҜд»ҘеӯҰеҲ°жӣҙеӨҡзҹҘиҜҶпјҢеҰӮжһңи§үеҫ—ж–Үз« дёҚй”ҷпјҢиҜ·жҠҠе®ғеҲҶдә«еҮәеҺ»и®©жӣҙеӨҡзҡ„дәәзңӢеҲ°гҖӮ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ