жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
жүӢжҠҠжүӢж•ҷдҪ е®һзҺ°иҙӘеҗғиӣҮAIпјҢе…·дҪ“еҶ…е®№еҰӮдёӢ
1. зӣ®ж Ү
иҝҷдёҖйғЁеҲҶдё»иҰҒжҳҜи®Іи§Јзј–еҶҷиҙӘеҗғиӣҮAIжүҖйңҖиҰҒз”ЁеҲ°зҡ„з®—жі•еҹәзЎҖгҖӮ
2. й—®йўҳеҲҶжһҗ
иҙӘеҗғиӣҮAIиҜҙзҷҪдәҶе°ұжҳҜеҜ»жүҫдёҖжқЎд»ҺиӣҮеӨҙеҲ°йЈҹзү©зҡ„дёҖжқЎжңҖзҹӯи·Ҝеҫ„пјҢеҗҢж—¶иҝҷжқЎи·Ҝеҫ„йңҖиҰҒйҒҝејҖйҡңзўҚзү©пјҢиҝҷйҮҢд»…жңүзҡ„йҡңзўҚе°ұжҳҜиӣҮиә«гҖӮиҖҢA star з®—жі•е°ұжҳҜдё“й—Ёй’ҲеҜ№иҝҷдёҖдёӘй—®йўҳзҡ„гҖӮеңЁA star з®—жі•дёӯйңҖиҰҒз”ЁеҲ°жҺ’еәҸз®—жі•пјҢиҝҷйҮҢйҮҮз”Ёе ҶжҺ’еәҸпјҲеҪ“然其他жҺ’еәҸд№ҹеҸҜд»ҘпјүпјҢеҰӮжһңеҜ№е ҶжҺ’еәҸдёҚзҶҹжӮүзҡ„жңӢеҸӢпјҢиҜ·з§»жӯҘеҲ°иҝҷйҮҢвҖ”вҖ”е ҶжҺ’еәҸпјҢе…ҲзңӢзңӢе ҶжҺ’еәҸзҡ„еҶ…е®№гҖӮ
3. A*з®—жі•
A star(д№ҹз§°A*)жҗңеҜ»з®—жі•дҝ—з§°Aжҳҹз®—жі•гҖӮиҝҷжҳҜдёҖз§ҚеңЁеӣҫеҪўе№ійқўдёҠпјҢжңүеӨҡдёӘиҠӮзӮ№зҡ„и·Ҝеҫ„пјҢжұӮеҮәжңҖдҪҺйҖҡиҝҮжҲҗжң¬зҡ„з®—жі•гҖӮеёёз”ЁдәҺжёёжҲҸдёӯеҜ№иұЎзҡ„移еҠЁи®Ўз®—дёҠгҖӮA* з®—жі•жҳҜдёҖз§ҚеҗҜеҸ‘ејҸжҗңеҜ»з®—жі•пјҢжңүеҲ«дәҺDFSпјҢ BFSжҗңзҙўгҖӮеҸҜд»Ҙиҝҷж ·зҗҶи§ЈвҖңеҗҜеҸ‘ејҸвҖқзҡ„ж¶өд№үпјҢжҜ”еҰӮд»Һиө·зӮ№AеҲ°иҫҫзӣ®зҡ„ең°Bзҡ„и·ҜзәҝпјҢ并дёҚжҳҜзӣҙжҺҘе‘ҠиҜүдҪ пјҢд»ҺAеҮәеҸ‘пјҢеҗ‘дёңиЎҢ驶200зұіпјҢеҸіиҪ¬иҝӣе…ҘXXи·ҜпјҢзӣҙиЎҢ500зұіеҲ°иҫҫBпјӣиҖҢжҳҜд»ҺAеҮәеҸ‘пјҢзӣҙиЎҢпјҢзӣҙеҲ°йҒҮеҲ°з¬¬дёҖ家иӮҜеҫ·еҹәпјҢеҸіиҪ¬зӣҙеҲ°зңӢеҲ°BеӨ§еҺҰгҖӮиҖҢA*з®—жі•дёӯз”ЁжқҘеҗҜеҸ‘зҡ„зәҝзҙўе°ұжҳҜ移еҠЁжҲҗжң¬пјҢд№ҹе°ұжҳҜжқғйҮҚгҖӮ
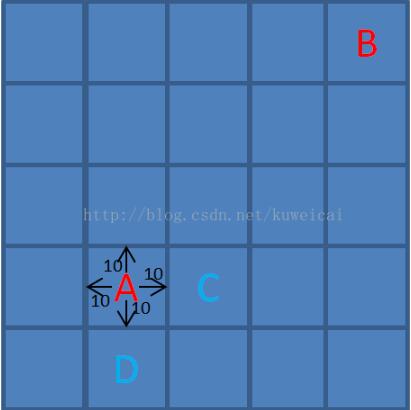
3.1 移еҠЁжҲҗжң¬
еҰӮдёӢеӣҫжүҖзӨәпјҢд»ҺAзӮ№еҮәеҸ‘пјҢеҸҜд»ҘжңүеӣӣдёӘж–№еҗ‘еҸҜиө°пјҲз”ұдәҺиҙӘеҗғиӣҮд»…д»…еҸҜд»Ҙиө°дёҠдёӢе·ҰеҸіеӣӣдёӘж–№еҗ‘пјҢжүҖд»ҘиҝҷйҮҢдёҚиҖғиҷ‘иө°ж–ңзәҝзҡ„жғ…еҶөпјүпјҢеҒҮи®ҫжҜҸдёӘж–№еҗ‘移еҠЁдёҖж јзҡ„жҲҗжң¬дёә10пјҢA*з®—жі•дёӯйҮҮз”Ёзҡ„FеҖјжқҘиҜ„价移еҠЁжҲҗжң¬пјҢF=G+HгҖӮеҒҮи®ҫиҠӮзӮ№CжҳҜеҫ…иҖғеҜҹзҡ„дёҖдёӘзӮ№пјҢGд»ЈиЎЁзҡ„жҳҜд»Һиө·зӮ№AеҲ°Cзҡ„移еҠЁжҲҗжң¬пјҢеҰӮдёӢеӣҫзҡ„жғ…еҶөG=10гҖӮйӮЈд№ҲHд»ЈиЎЁзҡ„е°ұжҳҜд»ҺCзӮ№еҲ°зӣ®ж ҮBзӮ№зҡ„移еҠЁд»Јд»·зҡ„йў„дј°еҖјпјҢеҰӮдёӢеӣҫзҡ„жғ…еҶөH=50пјҢйӮЈд№ҲF=60гҖӮдёәд»Җд№ҲиҜҙжҳҜйў„дј°пјҢеӣ дёәзҺ°еңЁеҜ№дәҺд»ҺCзӮ№еҲ°BзӮ№зҡ„жғ…еҶөиҝҳдёҚжё…жҘҡпјҢеӣ дёәдёӯй—ҙеҸҜиғҪеӯҳеңЁйҡңзўҚзү©пјҢйӮЈд№Ҳе®һйҷ…зҡ„移еҠЁд»Јд»·е°ұдјҡеӨ§дәҺйў„дј°зҡ„жғ…еҶөгҖӮиҖҢеҜ№дәҺеҫ…иҖғеҜҹзӮ№DпјҢе…¶F=80пјҢжҳҫ然еңЁC е’ҢDзӮ№дёӯпјҲеҪ“然иҝҷйҮҢеҫ…иҖғеҜҹзҡ„зӮ№дёҚжӯўCе’ҢDзӮ№пјүпјҢA*з®—жі•дјҡйҖүжӢ©CзӮ№гҖӮ
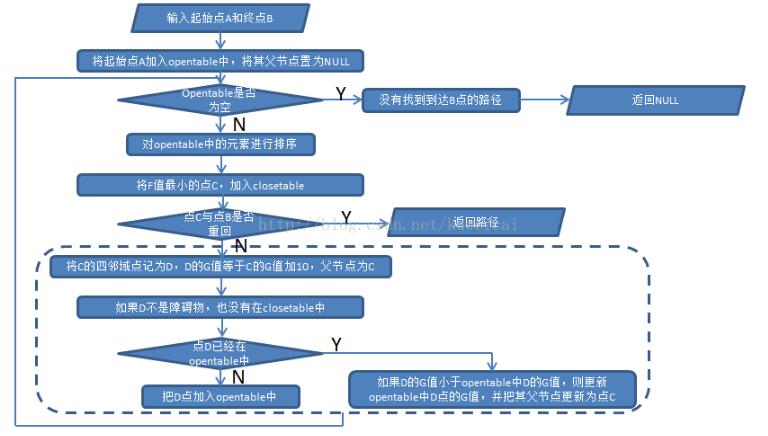
3.2 з®—жі•жөҒзЁӢеӣҫ
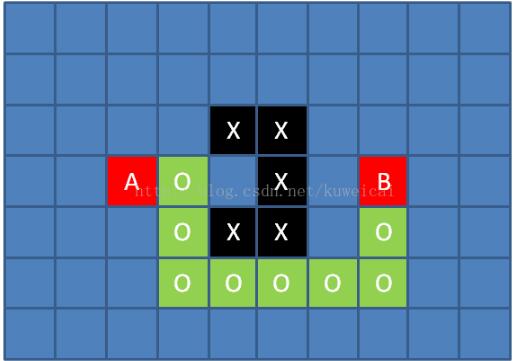
4. жәҗд»Јз Ғ
д»Јз ҒдёӯеҒҮе®ҡиө·е§ӢзӮ№A(5,10)пјҢйЈҹзү©B(5,15)пјҢеҰӮдёӢеӣҫгҖӮе…¶дёӯвҖҳX'д»ЈиЎЁйҡңзўҚзү©пјҢвҖҳO'д»ЈиЎЁзҡ„е°ұжҳҜеҜ»жүҫеҲ°зҡ„д»ҺAеҲ°Bзҡ„и·Ҝеҫ„гҖӮ
#include<stdio.h>
#include<stdlib.h>
#define N 32
#define W 10
typedef struct STARNODE{
int x;//иҠӮзӮ№зҡ„x,yеқҗж Ү
int y;
int G;//иҜҘиҠӮзӮ№зҡ„G, HеҖј
int H;
int is_snakebody;//жҳҜеҗҰдёәиӣҮиә«пјҢжҳҜдёә1пјҢеҗҰеҲҷдёә0пјӣ
int in_open_table;//жҳҜеҗҰеңЁopen_tableдёӯпјҢжҳҜдёә1пјҢеҗҰеҲҷдёә0пјӣ
int in_close_table;//жҳҜеҗҰеңЁclose_tableдёӯпјҢжҳҜдёә1пјҢеҗҰеҲҷдёә0пјӣ
struct STARNODE* ParentNode;//иҜҘиҠӮзӮ№зҡ„зҲ¶иҠӮзӮ№
} starnode, *pstarnode;
starnode mapnode[N/2+2][N+4];
pstarnode opentable[N*N/2];
pstarnode closetable[N*N/2];
int opennode_count=0;
int closenode_count=0;
starnode food;
//ж №жҚ®жҢҮй’ҲжүҖжҢҮеҗ‘зҡ„иҠӮзӮ№зҡ„FеҖјпјҢжҢүеӨ§йЎ¶е ҶиҝӣиЎҢи°ғж•ҙ
void heapadjust(pstarnode a[], int m, int n)
{
int i;
pstarnode temp=a[m];
for(i=2*m;i<=n;i*=2)
{
if(i+1<=n && (a[i+1]->G+a[i+1]->H)>(a[i]->G+a[i]->H) )
{
i++;
}
if((temp->G+temp->H)>(a[i]->G+a[i]->H))
{
break;
}
a[m]=a[i];
m=i;
}
a[m]=temp;
}
void swap(pstarnode a[],int m, int n)
{
pstarnode temp;
temp=a[m];
a[m]=a[n];
a[n]=temp;
}
void crtheap(pstarnode a[], int n)
{
int i;
for(i=n/2;i>0;i--)
{
heapadjust(a, i, n);
}
}
void heapsort(pstarnode a[], int n)
{
int i;
crtheap(a,n);
for(i=n;i>1;i--)
{
swap(a,1,i);
heapadjust(a, 1,i-1);
}
}
//x1, y1жҳҜйӮ»еҹҹзӮ№еқҗж Ү
//curtnodeжҳҜеҪ“еүҚзӮ№еқҗж Ү
void insert_opentable(int x1, int y1, pstarnode pcurtnode)
{
int i;
if(!mapnode[x1][y1].is_snakebody && !mapnode[x1][y1].in_close_table)//еҰӮжһңдёҚжҳҜиӣҮиә«д№ҹдёҚеңЁclosetableдёӯ
{
if(mapnode[x1][y1].in_open_table && mapnode[x1][y1].G>pcurtnode->G+W)//еҰӮжһңе·Із»ҸеңЁopentableдёӯ,дҪҶжҳҜдёҚжҳҜжңҖдјҳи·Ҝеҫ„
{
mapnode[x1][y1].G=pcurtnode->G+W;//жҠҠGеҖјжӣҙж–°
mapnode[x1][y1].ParentNode=pcurtnode;//жҠҠиҜҘйӮ»зӮ№зҡ„еҸҢдәІиҠӮзӮ№жӣҙж–°
//з”ұдәҺж”№еҸҳдәҶopentableдёӯдёҖдёӘзӮ№зҡ„FеҖјпјҢйңҖиҰҒеҜ№opentableдёӯзҡ„зӮ№зҡ„йЎәеәҸиҝӣиЎҢи°ғж•ҙпјҢд»Ҙж»Ўи¶іжңүеәҸ
for(i=1;i<=opennode_count;i++)
{
if(opentable[i]->x==x1 && opentable[i]->y==y1)
{
break;
}
heapsort(opentable, i);
}
}
else//жҠҠиҜҘзӮ№еҠ е…Ҙopentableдёӯ
{
opentable[++opennode_count]=&mapnode[x1][y1];
mapnode[x1][y1].G=pcurtnode->G+W;
mapnode[x1][y1].H=(abs(food.x-x1)+abs(food.y-y1))*W;
mapnode[x1][y1].in_open_table=1;
mapnode[x1][y1].ParentNode=pcurtnode;
heapsort(opentable, opennode_count);
}
}
}
//еҜ»жүҫеҪ“еүҚзӮ№зҡ„еӣӣйӮ»еҹҹзӮ№пјҢжҠҠз¬ҰеҗҲжқЎд»¶зҡ„зӮ№еҠ е…Ҙopentableдёӯ
void find_neighbor(pstarnode pcurtnode)
{
int x=pcurtnode->x;
int y=pcurtnode->y;
if(x+1<=N/2)
{
insert_opentable(x+1, y, pcurtnode);
}
if(x-1>=1)
{
insert_opentable(x-1, y, pcurtnode);
}
if(y+1<=N+1)
{
insert_opentable(x,y+1, pcurtnode);
}
if(y-1>=2)
{
insert_opentable(x,y-1, pcurtnode);
}
}
int search_road(pstarnode startnode, pstarnode endnode)
{
int is_search_road=0;
opennode_count=0;
closenode_count=0;
pstarnode pcurtnode;
opentable[++opennode_count]=startnode;//иө·е§ӢзӮ№еҠ е…Ҙopentableдёӯ
startnode->in_open_table=1;
startnode->ParentNode=NULL;
startnode->G=0;
startnode->H=(abs(endnode->x-startnode->x)+abs(endnode->y-startnode->y))*W;
if(startnode->x==endnode->x && startnode->y==endnode->y)//еҰӮжһңиө·зӮ№е’Ңз»ҲзӮ№йҮҚеҗҲ
{
is_search_road=1;
return is_search_road;
}
while(1)
{
//еҸ–еҮәopentableдёӯ第1дёӘиҠӮзӮ№еҠ е…Ҙclosetableдёӯ
pcurtnode=opentable[1];
opentable[1]=opentable[opennode_count--];
closetable[++closenode_count]=pcurtnode;
pcurtnode->in_open_table=0;
pcurtnode->in_close_table=1;
if(pcurtnode->x==endnode->x && pcurtnode->y==endnode->y)
{
is_search_road=1;
break;
}
find_neighbor(pcurtnode);
if(!opennode_count)//еҰӮжһңopentableе·Із»Ҹдёәз©әпјҢеҚіжІЎжңүжүҫеҲ°и·Ҝеҫ„
{
break;
}
}
return is_search_road;
}
int main(void)
{
int i, j;
pstarnode startnode;
for(i=0;i<N/2+2;i++)
for(j=0;j<N+4;j++)
{
mapnode[i][j].G=0;
mapnode[i][j].H=0;
mapnode[i][j].in_close_table=0;
mapnode[i][j].in_open_table=0;
mapnode[i][j].is_snakebody=0;
mapnode[i][j].ParentNode=NULL;
mapnode[i][j].x=i;
mapnode[i][j].y=j;
}
startnode=&mapnode[5][10];
food.x=5;
food.y=15;
mapnode[5][13].is_snakebody=1;
mapnode[6][13].is_snakebody=1;
mapnode[4][13].is_snakebody=1;
mapnode[4][12].is_snakebody=1;
mapnode[6][12].is_snakebody=1;
int flag;
flag=search_road(startnode, &food);
pstarnode temp=&mapnode[5][15];
do{
printf("%d %d\n",temp->x, temp->y);
temp=temp->ParentNode;
}while(temp);
return 0;
}
д»ҘдёҠе°ұжҳҜжң¬ж–Үзҡ„е…ЁйғЁеҶ…е®№пјҢеёҢжңӣеҜ№еӨ§е®¶зҡ„еӯҰд№ жңүжүҖеё®еҠ©пјҢд№ҹеёҢжңӣеӨ§е®¶еӨҡеӨҡж”ҜжҢҒдәҝйҖҹдә‘гҖӮ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ