您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章将为大家详细讲解有关Opencv如何实现分水岭算法,小编觉得挺实用的,因此分享给大家做个参考,希望大家阅读完这篇文章后可以有所收获。
分水岭算法可以将图像中的边缘转化成“山脉”,将均匀区域转化为“山谷”,这样有助于分割目标。
分水岭算法是一种基于拓扑理论的数学形态学的分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图像中的每一点像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆,而集水盆的边界则形成分水岭。分水岭的概念和形成可以通过模拟浸入过程来说明:在每一个局部极小值表面,刺穿一个小孔,然后把整个模型慢慢浸入水中,随着浸入的加深,每一个局部极小值的影响区域慢慢向外扩展,在两个集水盆汇合处构筑大坝,即形成分水岭。
分水岭的计算过程是一个迭代标注过程。分水岭计算分成两个步骤:一个是排序过程,一个是淹没过程。首先对每个像素的灰度级进行从低到高的排序,然后在从低到高实现淹没的过程中,对每一个局部极小值在h阶高度的影响域采用先进先出(FIFO)结构进行判断及标注。分水岭变换得到的是输入图像的集水盆图像,集水盆之间的边界点即为分水岭。显然,分水岭表示的是输入图像的极大值点。
简而言之,分水岭算法首先计算灰度图的梯度,这对图像中的“山谷”或没有纹理的“盆地”(亮度值低的点)的形成是很有效的,也对“山头”或图像中有主导线段的“山脉”(山脊对应的边缘)的形成有效。然后开始从用户指定点(或者算法得到点)开始持续“灌注”盆地直到这些区域连成一片。基于这样产生的标记就可以把区域合并到0一起,合并后的区域又通过聚集的方式进行分割,好像图像被“填充”起来一样。
实现分水岭算法–watershed函数
函数watershed实现的分水岭算法是基于标记的分割算法中的一种。在把图像传给函数之前,需要大致勾画标记出图像中的期望进行分割的区域,它们被标记为正指数,所以,每一个区域都会被标记为像素值1、2、3等,表示成为一个或者多个连接组件,这些标记的值可以使用findContours函数和drawContours函数由二进制的掩码检索出来。这些标记就是即将绘制出来的分割区域的“种子”,而没有标记清楚的区域,被置为0,在函数的输出中,每一个标记中的像素被设置为“种子”的值,而区域间的值被设置为-1。
void watershed(inputArray,intputOutputArray markers)
*第一个参数,输入图像,需为8位三通道的彩色图像。
*第二个参数,函数调用后的运算结果存在这里,输入/输入32位单通道图像的标记结果。
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<iostream>
using namespace cv;
using namespace std;
//宏定义
#define WINDOW_NAME "image[procedure window]"
//全局变量声明
Mat g_srcImage,g_maskImage;
Point prevPt(-1,-1);
//全局函数声明
static void on_Mouse(int event,int x,int y,int flags,void*);
//主函数
int main()
{
//载入源图像
g_srcImage=imread("/Users/new/Desktop/1.jpg");
if(!g_srcImage.data){printf("读取源图像srcImage错误~!\n");return false;}
//显示源图像
imshow(WINDOW_NAME,g_srcImage);
Mat srcImage,grayImage;
g_srcImage.copyTo(srcImage);
//灰度化
cvtColor(srcImage, g_maskImage, COLOR_BGR2GRAY);
//imshow("image[mask]",g_maskImage);
cvtColor(g_maskImage, grayImage, COLOR_GRAY2BGR);
//imshow("image[gray]",grayImage);
//掩膜图像初始化为0
g_maskImage=Scalar::all(0);
//设置鼠标回调函数
setMouseCallback(WINDOW_NAME, on_Mouse,0);
//轮询按键处理
while(1)
{
//获取键值
int c=waitKey(0);
//若按键为ESC时,退出
if((char)c == 27)
break;
//若按键为2时,恢复原图
if((char)c=='2')
{
g_maskImage=Scalar::all(0);
srcImage.copyTo(g_srcImage);
imshow("image",g_srcImage);
}
//若按键为1,则进行处理
if((char)c=='1')
{
//定义一些参数
int i,j,compCount=0;
vector<vector<Point>>contours;
vector<Vec4i> hierarchy;
//寻找轮廓
findContours(g_maskImage, contours, hierarchy, CV_RETR_CCOMP, CHAIN_APPROX_SIMPLE);
//轮廓为空时的处理
if(contours.empty())
continue;
//复制掩膜
Mat maskImage(g_maskImage.size(),CV_32S);
maskImage=Scalar::all(0);
//循环绘制轮廓
for(int index=0;index>=0;index=hierarchy[index][0],++compCount)
drawContours(maskImage, contours, index, Scalar::all(compCount+1),-1,8,hierarchy,INT_MAX);
//compCount为零时的处理
if(compCount==0)
continue;
//生成随机颜色
vector<Vec3b>colorTab;
for(int i=0;i<compCount;++i)
{
int b=theRNG().uniform(0, 255);
int g=theRNG().uniform(0, 255);
int r=theRNG().uniform(0, 255);
colorTab.push_back(Vec3b((uchar)b,(uchar)g,(uchar)r));
}
//计算处理时间并输出到窗口中
double dTime=(double)getTickCount();
//进行分水岭算法
watershed(srcImage, maskImage);
dTime=(double)getTickCount()-dTime;
printf("\t 处理时间=%gms\n",dTime*1000./getTickFrequency());
//双层循环,将分水岭图像遍历存入watershedImage中
Mat watershedImage(maskImage.size(),CV_8UC3);
for(i=0;i<maskImage.rows;++i)
for(j=0;j<maskImage.cols;++j)
{
int index=maskImage.at<int>(i,j);
if(index==-1)
watershedImage.at<Vec3b>(i,j)=Vec3b(255,255,255);//图像变白色
else if(index<=0||index>compCount)
watershedImage.at<Vec3b>(i,j)=Vec3b(0,0,0);//图像变黑色
else
watershedImage.at<Vec3b>(i,j)=colorTab[index-1];
}
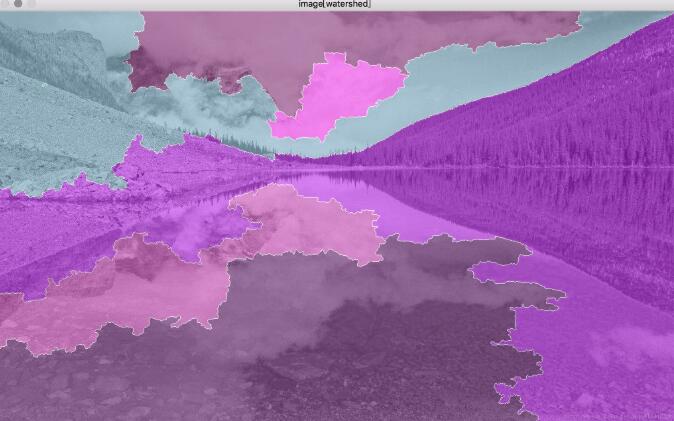
//混合灰度图和分水岭效果图并显示最终的窗口
watershedImage=watershedImage*0.5+grayImage*0.5;
imshow("image[watershed]",watershedImage);
}
}
return 0;
}
//回调函数定义
void on_Mouse(int event,int x,int y,int flags,void*)
{
//处理鼠标不在窗口中的情况
if(x<0||x>=g_srcImage.cols||y<0||y>=g_srcImage.rows)
return;
//处理鼠标左键相关消息
if(event==EVENT_LBUTTONUP||!(flags & EVENT_FLAG_LBUTTON))//按下左键
prevPt=Point(-1,-1);
else if(event==EVENT_LBUTTONDOWN)//松开左键
prevPt=Point(x,y);//鼠标所指的位置
//鼠标左键按下并移动,绘制出白色线条
else if(event==EVENT_MOUSEMOVE && (flags & EVENT_FLAG_LBUTTON))
{
Point pt(x,y);
if(prevPt.x<0)//如果指出去了,返回
prevPt=pt;
line(g_maskImage, prevPt, pt, Scalar::all(255),2,8,0);//画白线
line(g_srcImage,prevPt,pt,Scalar::all(255),2,8,0);//画白线
prevPt=pt;
imshow(WINDOW_NAME, g_srcImage);
}
}

Opencv技巧
(1)计算算法运行时间:
//计算处理时间并输出到窗口中
double dTime=(double)getTickCount();
//进行分水岭算法
watershed(srcImage, maskImage);
dTime=(double)getTickCount()-dTime;
printf("\t 处理时间=%gms\n",dTime*1000./getTickFrequency());(2)改变图像某点像素值:Mat类中的at方法对于获取图像矩阵某点的RGB值或者改变某点的值很方便,
对于单通道的图像:image.at<uchar>(i, j) 对于RGB通道的图像:image.at<Vec3b>(i, j)[0] image.at<Vec3b>(i, j)[1] image.at<Vec3b>(i, j)[2]
(3)Point(-1,-1)解析:由于卷积过程,图像矩阵要进行填充,Point(-1,-1)即代表卷积开始的位置,这决定了不填充时的结果A处于填充后结果B的位置的那个部分,从(-1,-1)开始卷积的结果是A处于B的正中间那块位置。
关于“Opencv如何实现分水岭算法”这篇文章就分享到这里了,希望以上内容可以对大家有一定的帮助,使各位可以学到更多知识,如果觉得文章不错,请把它分享出去让更多的人看到。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。