жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
жң¬зҜҮж–Үз« з»ҷеӨ§е®¶еҲҶдә«зҡ„жҳҜжңүе…іжҖҺд№ҲеңЁPythonдёӯдҪҝз”Ёopencvе®һзҺ°дёҖдёӘеӣҫеғҸиҪ®е»“еҪўзҠ¶иҜҶеҲ«еҠҹиғҪпјҢе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еӯҰд№ пјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« еҗҺеҸҜд»ҘжңүжүҖ收иҺ·пјҢиҜқдёҚеӨҡиҜҙпјҢи·ҹзқҖе°Ҹзј–дёҖиө·жқҘзңӢзңӢеҗ§гҖӮ
жҖқи·Ҝпјҡ
1. ж•°жҚ®зҡ„ж•ҙеҗҲ
2. еӣҫзүҮзҡ„зҒ°еәҰиҪ¬еҢ–
3. еӣҫзүҮзҡ„дәҢеҖјиҪ¬еҢ–
4. еӣҫзүҮзҡ„иҪ®е»“иҜҶеҲ«
5. еҫ—еҲ°еӣҫзүҮзҡ„йЎ¶зӮ№ж•°
6. дҫқжҚ®йЎ¶зӮ№ж•°еҲӨж–ӯеӣҫеғҸеҪўзҠ¶
еӣҫзүҮж–Ү件е…ұ36дёӘж–Ү件еӨ№пјҢжҜҸдёӘж–Ү件еӨ№жңү100еј еӣҫзүҮпјҢе…ұ3600еј еӣҫзүҮгҖӮ
жҜҸдёҖдёӘж–Ү件еӨ№йҮҢйғҪжңүеҪўеҗҢжӯӨзұ»зҡ„еӣҫеҪў
еҜ№дәҺеӨҡдёӘж–Ү件еӨ№пјҢеҲҶжһҗиө·жқҘеҫҲдёҚж–№дҫҝпјҢжүҖжңүеҶіе®ҡе°Ҷе…¶йғҪж”ҫеңЁдёҖдёӘж–Ү件еӨ№дёӢиҝӣиЎҢеҲҶжһҗпјҢеңЁpythonдёӯе…·дҪ“е®һзҺ°еҰӮдёӢпјҡ
жң¬ж¬ЎйңҖиҰҒзҡ„еҢ…
import cv2 import os from PIL import Image import matplotlib.pyplot as plt import numpy as np
a=os.listdir('C:\\Users\\dell\\Desktop\\OpenCVProofSet')#еҫӘзҺҜиҜ»еҸ–жҜҸдёӘеӯҗж–Ү件еӨ№
for i in range(len(a)):
b=os.listdir('C:\\Users\\dell\\Desktop\\OpenCVProofSet\\'+a[i])#иҜ»еҸ–жҜҸдёӘеӯҗж–Ү件дёӢзҡ„еӣҫзүҮж–Ү件
for j in range(len(b)):
c=Image.open('C:\\Users\\dell\\Desktop\\OpenCVProofSet\\'+a[i]+'\\'+b[j])#еҫӘзҺҜиҜ»еҸ–жҜҸдёӘеӣҫзүҮж–Ү件
c.save('C:\\Users\\dell\\Desktop\\cleardata\\'+str(i)+'_'+str(j)+'.png')#д»Ҙж–Ү件еӨ№еәҸеҸ·е’ҢеӣҫзүҮеәҸеҸ·дёәеҗҚдҝқеӯҳеңЁдёҖдёӘе…ҙе»әж–Ү件еӨ№дёӢз»“жһңеҰӮдёӢпјҡ

3.1еӣҫзүҮзҡ„зҒ°еәҰеӨ„зҗҶ
д»ҘдёӢд»ҘдёҖеј еӣҫзүҮдёәдҫӢеӯҗдҪңдёәиҜҙжҳҺ
еҜ№дәҺзҒ°еәҰзҡ„еӨ„зҗҶпјҢйҖүжӢ©дҪҝз”Ёopencvзҡ„cv2.cvtColorеҮҪж•°пјҢд»Јз ҒзӨәдҫӢеҰӮдёӢпјҡ
d=os.listdir('C:\\Users\\dell\\Desktop\\cleardata\\')#ж–Ү件и·Ҝеҫ„
e=cv2.imread('C:\\Users\\dell\\Desktop\\cleardata\\'+d[5])#д»Ҙзҹ©йҳөзҡ„еҪўејҸеӣҫзүҮиҜ»е…Ҙ
plt.imshow(e)#з”»еҮәзӨәдҫӢеӣҫ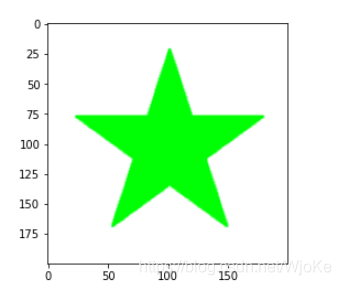
иҝӣиЎҢзҒ°еәҰзҡ„иҪ¬еҢ–пјҡ
g=cv2.cvtColor(e,cv2.COLOR_BGR2GRAY)##зҒ°еәҰиҪ¬еҢ–
3.2еӣҫзүҮзҡ„дәҢеҖјиҪ¬еҢ–
еҜ№дәҺеӣҫзүҮзҡ„дәҢеҖјиҪ¬еҢ–иҝҷйҮҢйҖүз”Ёcv2.thresholdеҮҪж•°пјҢд»Јз ҒзӨәдҫӢеҰӮдёӢпјҡ
r,b=cv2.threshold(g,0,255,cv2.THRESH_OTSU)#дәҢеҖјиҪ¬еҢ–пјҢеӨ§дәҺ0зҡ„еғҸзҙ з»ҹдёҖи®ҫзҪ®дёә255пјҢе°ҸдәҺзӯүдәҺ0зҡ„з»ҹдёҖи®ҫзҪ®дёә0
дёҠиҝ°д»Јз Ғзҡ„第дёҖдёӘеҸӮж•°дёәзҒ°еәҰеӣҫеҪўпјҢ第дәҢдёӘеҸӮж•°жҳҜйҳҲеҖјпјҢеҚіеӨ§дәҺ0зҡ„еғҸзҙ зӮ№иҪ¬еҢ–дёә255пјҢ然еҗҺйҖүз”Ёзҡ„THRESH_OTSUж–№жі•пјҢе…·дҪ“иҜҙжҳҺеҰӮдёӢпјҡ
йҖҡеёёжғ…еҶөпјҢжҲ‘们дёҖиҲ¬дёҚзҹҘйҒ“и®ҫе®ҡжҖҺж ·зҡ„йҳҲеҖјthreshжүҚиғҪеҫ—еҲ°жҜ”иҫғеҘҪзҡ„дәҢеҖјеҢ–ж•ҲжһңпјҢеҸӘиғҪеҺ»иҜ•гҖӮеҰӮеҜ№дәҺдёҖе№…еҸҢеі°еӣҫеғҸпјҲзҗҶи§ЈдёәеӣҫеғҸзӣҙж–№еӣҫдёӯеӯҳеңЁдёӨдёӘеі°пјүпјҢжҲ‘们жҢҮе®ҡзҡ„йҳҲеҖјеә”е°ҪйҮҸеңЁдёӨдёӘеі°д№Ӣй—ҙзҡ„еі°и°·гҖӮиҝҷж—¶пјҢе°ұеҸҜд»Ҙ用第еӣӣдёӘеҸӮж•°THRESH_OTSUпјҢе®ғеҜ№дёҖе№…еҸҢеі°еӣҫеғҸиҮӘеҠЁж №жҚ®е…¶зӣҙж–№еӣҫи®Ўз®—еҮәеҗҲйҖӮзҡ„йҳҲеҖјпјҲеҜ№дәҺйқһеҸҢеі°еӣҫпјҢиҝҷз§Қж–№жі•еҫ—еҲ°зҡ„з»“жһңеҸҜиғҪдёҚзҗҶжғіпјүгҖӮ
еҜ№дәҺеҸҢеі°еӣҫпјҢжҲ‘们йңҖиҰҒеӨҡдј е…ҘдёҖдёӘеҸӮж•°cv2.THRESH_OTSUпјҢ并且жҠҠйҳҲеҖјthreshи®ҫдёә0пјҢз®—жі•дјҡжүҫеҲ°жңҖдјҳйҳҲеҖјпјҢ并дҪңдёә第дёҖдёӘиҝ”еӣһеҖјretиҝ”еӣһгҖӮ
е…¶дёӯдјҡиҝ”еӣһдёӨдёӘеҖјпјҢ第дәҢдёӘеҖје°ұжҳҜдәҢеҖјеҢ–еҗҺзҡ„еӣҫеҪўзҹ©йҳөгҖӮ
3.3иҪ®е»“зҡ„еҜ»жүҫ
еңЁиҪ®е»“зҡ„еҜ»жүҫж–№йқўпјҢйҮҮз”Ёcv2.findContoursж–№ејҸгҖӮд»Јз ҒзӨәдҫӢеҰӮдёӢпјҡ
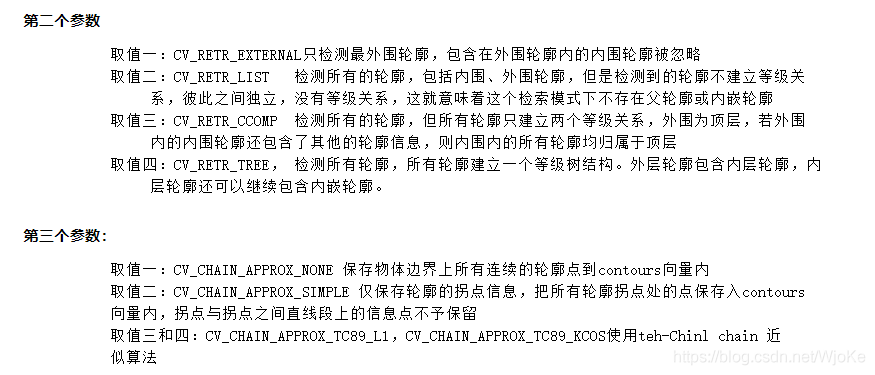
cr,t=cv2.findContours(b, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)##жүҫеҲ°иҫ№з•ҢпјҢ第дёҖдёӘеҸӮж•°жҳҜдәҢеҖјеӣҫеғҸпјҢ第дәҢдёӘеҸӮж•°жҳҜиҺ·еҸ–иҪ®е»“зҡ„ж–№ејҸпјҢ #第дёүдёӘеҸӮж•°е®ҡд№үиҪ®е»“зҡ„иҝ‘дјјж–№ејҸ
дёҠиҝ°еҮҪж•°йҮҢзҡ„еҸӮж•°дёӯпјҢ第дёҖдёӘеҸӮж•°жҳҜдәҢеҖјеҢ–еҗҺзҡ„зҹ©йҳөпјҢ第дәҢдёӘеҸӮж•°жҳҜиҺ·еҸ–иҪ®е»“зҡ„ж–№ејҸпјҢ第дёүдёӘеҸӮж•°жҳҜе®ҡд№үиҪ®е»“зҡ„иҝ‘дјјж–№ејҸгҖӮеҗҺйқўдёӨдёӘеҸӮж•°зҡ„е…·дҪ“и§ЈйҮҠеҰӮдёӢпјҡ
дёҠйқўеҫ—еҲ°зҡ„з»“жһңдёӯ第дёҖдёӘз»“жһңжҳҜиҪ®е»“зӮ№зҡ„йӣҶеҗҲгҖӮ
з”»еҮәиҫ№з•ҢиҪ®е»“пјҢиҝҗз”ЁеҮҪж•°жҳҜcv2.drawContoursпјҢд»Јз ҒзӨәдҫӢеҰӮдёӢпјҡ
plt.imshow(cv2.drawContours(e,cr,-1,50))#з”»еҮәиҫ№з•ҢпјҢеҸҜд»ҘзңӢеҮәжңүеқҗж ҮиҪҙе’Ңдә”и§’жҳҹдёӨдёӘиҫ№з•ҢпјҢ第дёҖдёӘеҸӮж•°жҳҜеҺҹеӣҫпјҢ第дәҢдёӘеҸӮж•°жҳҜиҫ№з•ҢпјҢ #第дёүдёӘеҸӮж•°д»ЈиЎЁз”»еҮәжүҖжңүиҫ№з•ҢпјҢ第еӣӣдёӘеҸӮж•°жҳҜзәҝзҡ„зІ—з»Ҷ
дёҠиҝ°еҮҪж•°дёӯ第дёҖдёӘеҸӮж•°жҳҜеҺҹе§ӢеӣҫеҪўпјҢ第дәҢдёӘеҸӮж•°жҳҜеҫ—еҲ°зҡ„иҪ®е»“зӮ№зҡ„йӣҶеҗҲпјҢ第дёүдёӘеҸӮж•°жҳҜд»ЈиЎЁз”»еҮәжүҖжңүиҪ®е»“зӮ№пјҢ第еӣӣдёӘеҸӮж•°жҳҜзәҝзҡ„зІ—з»ҶгҖӮ
еҫ—еҲ°з»“жһңеҰӮдёӢпјҡ
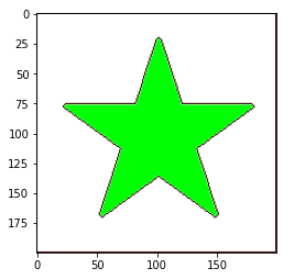
еҸҜд»ҘеҸ‘зҺ°пјҢеқҗж ҮиҪҙзҡ„иҪ®е»“е’Ңдә”и§’жҳҹзҡ„иҪ®е»“йғҪиў«з”»дәҶеҮәжқҘгҖӮ
3.4иҪ®е»“зҡ„йҖјиҝ‘пјҢеҫ—еҲ°йЎ¶зӮ№
еңЁеҫ—еҲ°иҪ®е»“зӮ№еҗҺпјҢйңҖиҰҒеҫ—еҲ°иҪ®е»“зҡ„йЎ¶зӮ№пјҢйҖҡиҝҮйЎ¶зӮ№еҫ—еҲ°е…·дҪ“д»Җд№ҲеӣҫеҪўпјҢеңЁиҪ®е»“йҖјиҝ‘дёӯз”ЁеҲ°дёӨдёӘеҮҪж•°пјҡcv2.arcLengthпјҢcv2.approxPolyDPпјҢд»Јз ҒзӨәдҫӢеҰӮдёӢпјҡ
ep = 0.01*cv2.arcLength(cr[1], True)#дә”и§’жҳҹиҪ®е»“зҡ„е‘Ёй•ҝcr[0]жҳҜеқҗж ҮиҪҙзҡ„е‘Ёй•ҝпјҢ然еҗҺе°Ҷе…¶зј©е°ҸпјҢдҪңдёәдёӢдёҖжӯҘзҡ„йҳҲеҖј ap = cv2.approxPolyDP(cr[1], ep, True)#иҪ®е»“зҡ„иҪ¬жҠҳзӮ№зҡ„иҝ‘дјјзӮ№
cv2.arcLengthеҫ—еҲ°зҡ„жҳҜиҪ®е»“зӮ№еҪўжҲҗзҡ„жӣІзәҝеӣҙжҲҗзҡ„еӣҫеҪўзҡ„е‘Ёй•ҝпјҢcr[1]д»ЈиЎЁйҮҢеұӮдә”и§’жҳҹзҡ„иҪ®е»“зӮ№пјҢеӣ дёәcrйҮҢжңүдёӨдёӘиҪ®е»“йӣҶеҗҲпјҢдёҖдёӘжҳҜеӨ–еұӮзҡ„еқҗж ҮиҪҙзҡ„иҪ®е»“зӮ№йӣҶеҗҲпјҢдёҖдёӘжҳҜйҮҢеұӮдә”и§’жҳҹзҡ„иҪ®е»“зӮ№йӣҶеҗҲгҖӮTrueд»ЈиЎЁй—ӯеҗҲзҡ„жӣІзәҝгҖӮе°Ҷе…¶еҸ–1%дҪңдёәдёӢдёҖдёӘеҮҪж•°зҡ„йҳҲеҖјгҖӮ
cv2.approxPolyDPе°Ҷе…¶еҫ—еҲ°зҡ„иҪ®е»“зӮ№иҝӣиЎҢзӯӣйҖүпјҲжҢүи®ҫе®ҡзҡ„йҳҲеҖјдёҺе…¶зңҹе®һзҡ„зәҝиҝӣиЎҢжҜ”иҫғпјүпјҢе…¶зӯӣйҖүзҡ„ж ҮеҮҶе°ұжҳҜдёҠдёҖдёӘеҮҪж•°еҫ—еҲ°зҡ„1%зҡ„е‘Ёй•ҝпјҢеӨ§дәҺиҝҷдёӘеҖјзҡ„зӮ№иҲҚеҺ»пјҢе°ҸдәҺиҝҷдёӘеҖјзҡ„зӮ№дҝқз•ҷпјҢTrueдҫқ然代表й—ӯеҗҲжӣІзәҝгҖӮ
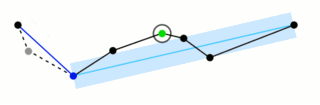
йҖҡиҝҮд»ҘдёҠзҡ„жӯҘйӘӨе°ұеҸҜд»Ҙдҝқз•ҷдёҖдәӣзӮ№пјҢиҖҢиҝҷдәӣзӮ№е°ұжҳҜеҫ—еҲ°йЎ¶зӮ№пјҲиҝҷзӮ№йңҖиҰҒиҜ»иҖ…еҺ»жғідёҖжғіпјҢдёәд»Җд№Ҳд»Ҙ1%е‘Ёй•ҝдёәйҳҲеҖјеҫ—еҲ°зҡ„зӮ№е°ұжҳҜйЎ¶зӮ№пјҢдҪңиҖ…и®ӨдёәжҳҜдёӨжқЎзәҝзҡ„жӢҗзӮ№зӣёеҜ№дәҺжқҘиҜҙжҳҜйҮҢзңҹе®һзәҝжңҖиҝ‘зҡ„зӮ№пјү
йЎ¶зӮ№ж•°пјҡ
len(ap)#еҸҜд»ҘзңӢи§Ғдә”и§’жҳҹжңү10дёӘзӮ№
ж №жҚ®еҫ—еҲ°зҡ„е®ҡзӮ№ж•°е°ұеҸҜеҲӨж–ӯеҮәеҪўзҠ¶дәҶпјҢдёүдёӘйЎ¶зӮ№е°ұжҳҜдёүи§’еҪўпјҢеӣӣдёӘе°ұжҳҜзҹ©еҪўпјҢеҚҒдёӘе°ұжҳҜдә”и§’жҳҹпјҢеҚҒдёӘд»ҘдёҠе°ұжҳҜеңҶеҪўдәҶпјӣдёҠиҝ°зҡ„е®Ңж•ҙд»Јз ҒеҰӮдёӢпјҡ
import cv2
import os
from PIL import Image
import matplotlib.pyplot as plt
import numpy as np
d=os.listdir('C:\\Users\\dell\\Desktop\\cleardata\\')
for i in range(len(d)):
e=cv2.imread('C:\\Users\\dell\\Desktop\\cleardata\\'+d[i])
g=cv2.cvtColor(e,cv2.COLOR_BGR2GRAY)
r,b=cv2.threshold(g,0,255,cv2.THRESH_OTSU)
cr,t=cv2.findContours(b, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
ep = 0.01*cv2.arcLength(cr[1], True)
ap = cv2.approxPolyDP(cr[1], ep, True)
co=len(ap)
if co==3:
st='дёүи§’еҪў'
elif co==4:
st='зҹ©еҪў'
elif co==10:
st='дә”и§’жҳҹ'
else:
st='еңҶ'
plt.imsave('C:\\Users\\dell\\Desktop\\еҪўзҠ¶\\'+st+str(e[100][100])+str(i)+'.jpg',e)#еҸ–еӣҫеғҸдёӯй—ҙзҡ„зӮ№зҡ„RGBдҪңдёәйўңиүІд»ЈиЎЁд»ҘдёҠе°ұжҳҜжҖҺд№ҲеңЁPythonдёӯдҪҝз”Ёopencvе®һзҺ°дёҖдёӘеӣҫеғҸиҪ®е»“еҪўзҠ¶иҜҶеҲ«еҠҹиғҪпјҢе°Ҹзј–зӣёдҝЎжңүйғЁеҲҶзҹҘиҜҶзӮ№еҸҜиғҪжҳҜжҲ‘们ж—Ҙеёёе·ҘдҪңдјҡи§ҒеҲ°жҲ–з”ЁеҲ°зҡ„гҖӮеёҢжңӣдҪ иғҪйҖҡиҝҮиҝҷзҜҮж–Үз« еӯҰеҲ°жӣҙеӨҡзҹҘиҜҶгҖӮжӣҙеӨҡиҜҰжғ…敬иҜ·е…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“гҖӮ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ