您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
这篇文章将为大家详细讲解有关OpenCV自定义色条如何实现灰度图上色功能,小编觉得挺实用的,因此分享给大家做个参考,希望大家阅读完这篇文章后可以有所收获。
Qt在进行2D图像显示时,有很方便的色条接口,可以让灰度图基于其设计的色条进行上色,比如设置1为红色,0.55为黄色,0.45为绿色,0为蓝色,那么灰度图就会在归一化后按照从蓝到红(从小到大)进行渐变色上色。但是有时候这个接口需要搭配的代码太多,给开发带来一定麻烦,因此我基于其原理写了一个可以替代该功能的函数GrayToColor_ColorBar。
函数原理:首先需要将灰度值图转化为0-255的8通道(uchar)灰度图,运用归一化函数可以实现;之后考虑到颜色和灰度的关系,比如最低的颜色为蓝色(0,0,255)对应灰度值0,最高的颜色为红色(255,0,0)对应灰度值255,只需要找出其变化的规律即可。
下方为具体实现函数和测试代码。
功能函数代码
/**
* @brief GrayToColor_ColorBar 运用色条灰度图上色(1:红色,param1:黄色,param2:绿色,0:蓝色)
* @param phase 输入的灰色图像,通道为1
* @param param1 色条参数1
* @param param2 色条参数2
* @return 上色后的图像
*/
cv::Mat GrayToColor_ColorBar(cv::Mat &phase, float param1, float param2)
{
CV_Assert(phase.channels() == 1);
// 色条参数1必须大于色条参数2
if (param2 >= param1)
{
return cv::Mat::zeros(10, 10, CV_8UC1);
}
cv::Mat temp, result, mask;
// 将灰度图重新归一化至0-255
cv::normalize(phase, temp, 255, 0, cv::NORM_MINMAX);
temp.convertTo(temp, CV_8UC1);
// 创建掩膜,目的是为了隔离nan值的干扰
mask = cv::Mat::zeros(phase.size(), CV_8UC1);
mask.setTo(255, phase == phase);
// 初始化三通道颜色图
cv::Mat color1, color2, color3;
color1 = cv::Mat::zeros(temp.size(), temp.type());
color2 = cv::Mat::zeros(temp.size(), temp.type());
color3 = cv::Mat::zeros(temp.size(), temp.type());
int row = phase.rows;
int col = phase.cols;
// 基于灰度图的灰度层级,给其上色,最底的灰度值0为蓝色(255,0,0),最高的灰度值255为红色(0,0,255),中间的灰度值127为绿色(0,255,0)
// 不要惊讶蓝色为什么是(255,0,0),因为OpenCV中是BGR而不是RGB
for (int i = 0; i < row; ++i)
{
uchar *c1 = color1.ptr<uchar>(i);
uchar *c2 = color2.ptr<uchar>(i);
uchar *c3 = color3.ptr<uchar>(i);
uchar *r = temp.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if (m[j] == 255)
{
if (r[j] > (param1 * 255) && r[j] <= 255)
{
c1[j] = 255;
c2[j] = uchar((1 / (1 - param1)) * (255 - r[j]));
c3[j] = 0;
}
else if (r[j] <= (param1 * 255) && r[j] > (param2 * 255))
{
c1[j] = uchar((1 / (param1 - param2)) * r[j] - (param2 / (param1 - param2)) * 255);
c2[j] = 255;
c3[j] = 0;
}
else if (r[j] <= (param2 * 255) && r[j] >= 0)
{
c1[j] = 0;
c2[j] = uchar((1 / param2) * r[j]);
c3[j] = uchar(255 - (1 / param2) * r[j]);
}
else {
c1[j] = 0;
c2[j] = 0;
c3[j] = 0;
}
}
}
}
// 三通道合并,得到颜色图
vector<cv::Mat> images;
images.push_back(color3);
images.push_back(color2);
images.push_back(color1);
cv::merge(images, result);
return result;
}C++测试代码
#include<iostream>
#include<opencv2/opencv.hpp>
#include<ctime>
using namespace std;
using namespace cv;
void UnitPolar(int squaresize, cv::Mat& mag, cv::Mat& ang);
void UnitCart(int squaresize, cv::Mat& x, cv::Mat& y);
cv::Mat GrayToColor_ColorBar(cv::Mat &phase, float param1, float param2);
int main(void)
{
cv::Mat mag, ang, result, result3;
UnitPolar(2001, mag, ang);
mag.at<float>(10, 10) = nan("");
clock_t start, end;
start = clock();
result = GrayToColor_ColorBar(mag,0.5,0.3);
end = clock();
double diff = end - start;
cout << "time:" << diff / CLOCKS_PER_SEC << endl;
system("pause");
return 0;
}
void UnitPolar(int squaresize, cv::Mat& mag, cv::Mat& ang) {
cv::Mat x;
cv::Mat y;
UnitCart(squaresize, x, y); //产生指定范围内的指定数量点数,相邻数据跨度相同
// OpenCV自带的转换有精度限制,导致结果有一定差异性
//cv::cartToPolar(x, y, mag, ang, false); //坐标转换
mag = cv::Mat(x.size(), x.type());
ang = cv::Mat(x.size(), x.type());
int row = mag.rows;
int col = mag.cols;
float *m, *a, *xx, *yy;
for (int i = 0; i < row; ++i)
{
m = mag.ptr<float>(i);
a = ang.ptr<float>(i);
xx = x.ptr<float>(i);
yy = y.ptr<float>(i);
for (int j = 0; j < col; ++j)
{
m[j] = sqrt(xx[j] * xx[j] + yy[j] * yy[j]);
a[j] = atan2(yy[j], xx[j]);
}
}
}
void UnitCart(int squaresize, cv::Mat& x, cv::Mat& y) {
CV_Assert(squaresize % 2 == 1);
x.create(squaresize, squaresize, CV_32FC1);
y.create(squaresize, squaresize, CV_32FC1);
//设置边界
x.col(0).setTo(-1.0);
x.col(squaresize - 1).setTo(1.0f);
y.row(0).setTo(1.0);
y.row(squaresize - 1).setTo(-1.0f);
float delta = 2.0f / (squaresize - 1.0f); //两个元素的间隔
//计算其他位置的值
for (int i = 1; i < squaresize - 1; ++i) {
x.col(i) = -1.0f + i * delta;
y.row(i) = 1.0f - i * delta;
}
}
/**
* @brief GrayToColor_ColorBar 运用色条灰度图上色(1:红色,param1:黄色,param2:绿色,0:蓝色)
* @param phase 输入的灰色图像,通道为1
* @param param1 色条参数1
* @param param2 色条参数2
* @return 上色后的图像
*/
cv::Mat GrayToColor_ColorBar(cv::Mat &phase, float param1, float param2)
{
CV_Assert(phase.channels() == 1);
// 色条参数1必须大于色条参数2
if (param2 >= param1)
{
return cv::Mat::zeros(10, 10, CV_8UC1);
}
cv::Mat temp, result, mask;
// 将灰度图重新归一化至0-255
cv::normalize(phase, temp, 255, 0, cv::NORM_MINMAX);
temp.convertTo(temp, CV_8UC1);
// 创建掩膜,目的是为了隔离nan值的干扰
mask = cv::Mat::zeros(phase.size(), CV_8UC1);
mask.setTo(255, phase == phase);
// 初始化三通道颜色图
cv::Mat color1, color2, color3;
color1 = cv::Mat::zeros(temp.size(), temp.type());
color2 = cv::Mat::zeros(temp.size(), temp.type());
color3 = cv::Mat::zeros(temp.size(), temp.type());
int row = phase.rows;
int col = phase.cols;
// 基于灰度图的灰度层级,给其上色,最底的灰度值0为蓝色(255,0,0),最高的灰度值255为红色(0,0,255),中间的灰度值127为绿色(0,255,0)
// 不要惊讶蓝色为什么是(255,0,0),因为OpenCV中是BGR而不是RGB
for (int i = 0; i < row; ++i)
{
uchar *c1 = color1.ptr<uchar>(i);
uchar *c2 = color2.ptr<uchar>(i);
uchar *c3 = color3.ptr<uchar>(i);
uchar *r = temp.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if (m[j] == 255)
{
if (r[j] > (param1 * 255) && r[j] <= 255)
{
c1[j] = 255;
c2[j] = uchar((1 / (1 - param1)) * (255 - r[j]));
c3[j] = 0;
}
else if (r[j] <= (param1 * 255) && r[j] > (param2 * 255))
{
c1[j] = uchar((1 / (param1 - param2)) * r[j] - (param2 / (param1 - param2)) * 255);
c2[j] = 255;
c3[j] = 0;
}
else if (r[j] <= (param2 * 255) && r[j] >= 0)
{
c1[j] = 0;
c2[j] = uchar((1 / param2) * r[j]);
c3[j] = uchar(255 - (1 / param2) * r[j]);
}
else {
c1[j] = 0;
c2[j] = 0;
c3[j] = 0;
}
}
}
}
// 三通道合并,得到颜色图
vector<cv::Mat> images;
images.push_back(color3);
images.push_back(color2);
images.push_back(color1);
cv::merge(images, result);
return result;
}测试效果

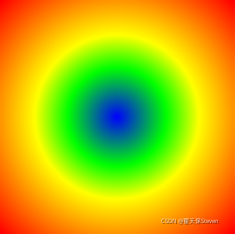

如上图所示,为了方便,我生成了一个2001*2001的图像矩阵,图1为灰度图,图2图3是经过颜色处理后的颜色图,满足了前面提到的需求,这两个效果图对应的参数不一样。
关于“OpenCV自定义色条如何实现灰度图上色功能”这篇文章就分享到这里了,希望以上内容可以对大家有一定的帮助,使各位可以学到更多知识,如果觉得文章不错,请把它分享出去让更多的人看到。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。