жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
е°Ҹзј–з»ҷеӨ§е®¶еҲҶдә«дёҖдёӢopencvеҰӮдҪ•е®һзҺ°ж‘„еғҸжңәж Үе®ҡпјҢзӣёдҝЎеӨ§йғЁеҲҶдәәйғҪиҝҳдёҚжҖҺд№ҲдәҶи§ЈпјҢеӣ жӯӨеҲҶдә«иҝҷзҜҮж–Үз« з»ҷеӨ§е®¶еҸӮиҖғдёҖдёӢпјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« еҗҺеӨ§жңү收иҺ·пјҢдёӢйқўи®©жҲ‘们дёҖиө·еҺ»дәҶи§ЈдёҖдёӢеҗ§пјҒ
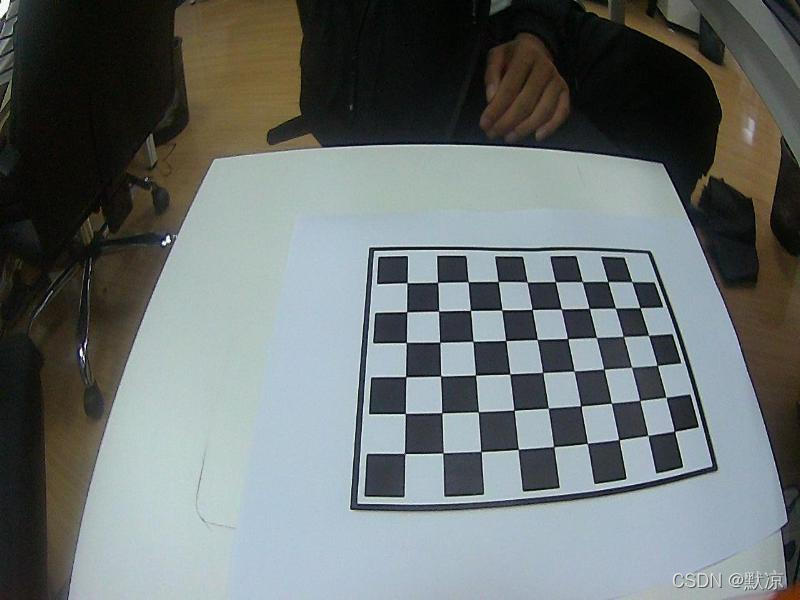
еҺҹеӣҫ
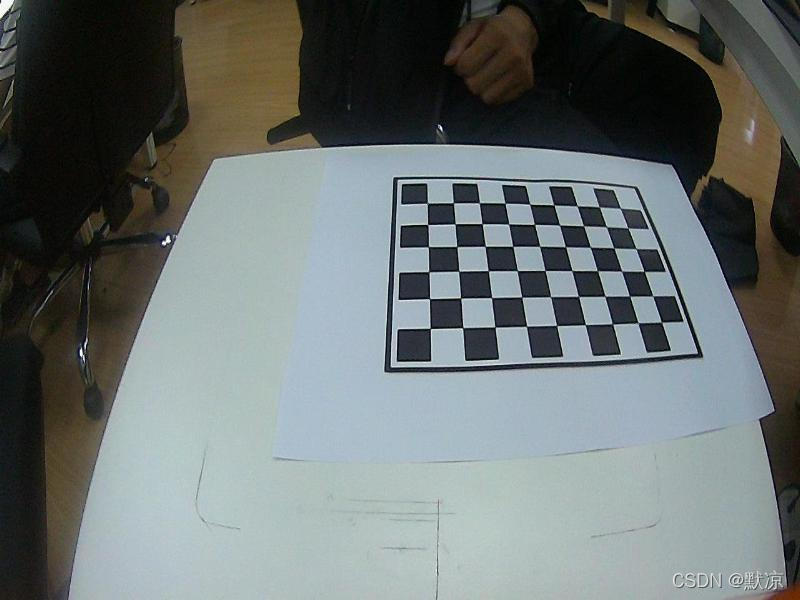
зҹ«жӯЈеҗҺ
жҲ‘ж–°е»әдәҶдёӘjzзҡ„ж–Ү件еӨ№ж”ҫзӣёжңәзҹ«жӯЈжүҖйңҖиҰҒжӢҚж‘„зҡ„еӣҫзүҮпјҢеҰӮдёӢпјҡе…ұ12еј



# coding:utf-8
import cv2
import numpy as np
import glob
# жүҫжЈӢзӣҳж ји§’зӮ№
# йҳҲеҖј
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# жЈӢзӣҳж јжЁЎжқҝи§„ж ј д»Һ0ејҖе§Ӣи®Ўз®—
w = 9
h = 6
# дё–з•Ңеқҗж Үзі»дёӯзҡ„жЈӢзӣҳж јзӮ№,дҫӢеҰӮ(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0)пјҢеҺ»жҺүZеқҗж ҮпјҢи®°дёәдәҢз»ҙзҹ©йҳө
objp = np.zeros((w * h, 3), np.float32)
objp[:, :2] = np.mgrid[0:w, 0:h].T.reshape(-1, 2)
# еӮЁеӯҳжЈӢзӣҳж ји§’зӮ№зҡ„дё–з•Ңеқҗж Үе’ҢеӣҫеғҸеқҗж ҮеҜ№
objpoints = [] # еңЁдё–з•Ңеқҗж Үзі»дёӯзҡ„дёүз»ҙзӮ№
imgpoints = [] # еңЁеӣҫеғҸе№ійқўзҡ„дәҢз»ҙзӮ№
# еҢ№й…ҚиҜ»еҸ–ж–Ү件еӨ№еҶ…зҡ„зү№е®ҡж–Ү件
images = glob.glob('jz/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# жүҫеҲ°жЈӢзӣҳж ји§’зӮ№
ret, corners = cv2.findChessboardCorners(gray, (w, h), None)
# е°Ҷи§’зӮ№еңЁеӣҫеғҸдёҠжҳҫзӨә
cv2.drawChessboardCorners(img, (w, h), corners, ret)
cv2.imshow('findCorners', img)
cv2.waitKey(500)
cv2.destroyAllWindows()
# еҰӮжһңжүҫеҲ°и¶іеӨҹзӮ№еҜ№пјҢе°Ҷе…¶еӯҳеӮЁиө·жқҘ
if ret == True:
cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
objpoints.append(objp)
imgpoints.append(corners)
# ж Үе®ҡ
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# еңЁеә”з”Ёж—¶пјҢе°ҶдёӢйқўдёӨдёӘеҶҷжӯ»
print(mtx)
print(dist)
# еҺ»з•ёеҸҳ
img2 = cv2.imread('77.jpg')
h, w = img2.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 0, (w, h)) # иҮӘз”ұжҜ”дҫӢеҸӮж•°
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# ж №жҚ®еүҚйқўROIеҢәеҹҹиЈҒеүӘеӣҫзүҮ
# x,y,w,h = roi
# dst = dst[y:y+h, x:x+w]
cv2.imwrite('1.jpg', dst)
cv2.imshow('findCorners', dst)
cv2.waitKey(0)
cv2.destroyAllWindows()д»ҘдёҠжҳҜвҖңopencvеҰӮдҪ•е®һзҺ°ж‘„еғҸжңәж Үе®ҡвҖқиҝҷзҜҮж–Үз« зҡ„жүҖжңүеҶ…е®№пјҢж„ҹи°ўеҗ„дҪҚзҡ„йҳ…иҜ»пјҒзӣёдҝЎеӨ§е®¶йғҪжңүдәҶдёҖе®ҡзҡ„дәҶи§ЈпјҢеёҢжңӣеҲҶдә«зҡ„еҶ…е®№еҜ№еӨ§е®¶жңүжүҖеё®еҠ©пјҢеҰӮжһңиҝҳжғіеӯҰд№ жӣҙеӨҡзҹҘиҜҶпјҢж¬ўиҝҺе…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“пјҒ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ