жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
иҝҷзҜҮж–Үз« дё»иҰҒд»Ӣз»ҚдәҶеҰӮдҪ•дҪҝз”ЁmatlabйёҹзҫӨз®—жі•жұӮи§ЈиҪҰй—ҙи°ғеәҰй—®йўҳпјҢе…·жңүдёҖе®ҡеҖҹйүҙд»·еҖјпјҢж„ҹе…ҙи¶Јзҡ„жңӢеҸӢеҸҜд»ҘеҸӮиҖғдёӢпјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« д№ӢеҗҺеӨ§жңү收иҺ·пјҢдёӢйқўи®©е°Ҹзј–еёҰзқҖеӨ§е®¶дёҖиө·дәҶи§ЈдёҖдёӢгҖӮ
иҪҰй—ҙи°ғеәҰжҳҜжҢҮж №жҚ®дә§е“ҒеҲ¶йҖ зҡ„еҗҲзҗҶйңҖжұӮеҲҶй…ҚеҠ е·ҘиҪҰй—ҙйЎәеәҸпјҢд»ҺиҖҢиҫҫеҲ°еҗҲзҗҶеҲ©з”Ёдә§е“ҒеҲ¶йҖ иө„жәҗгҖҒжҸҗй«ҳдјҒдёҡз»ҸжөҺж•ҲзӣҠзҡ„зӣ®зҡ„гҖӮиҪҰй—ҙи°ғеәҰй—®йўҳд»Һж•°еӯҰдёҠеҸҜд»ҘжҸҸиҝ°дёәжңүnдёӘеҫ…еҠ е·Ҙзҡ„йӣ¶д»¶иҰҒеңЁmеҸ°жңәеҷЁдёҠеҠ е·ҘгҖӮй—®йўҳйңҖиҰҒж»Ўи¶ізҡ„жқЎд»¶еҢ…жӢ¬жҜҸдёӘйӣ¶д»¶зҡ„еҗ„йҒ“е·ҘеәҸдҪҝз”ЁжҜҸеҸ°жңәеҷЁдёҚеӨҡдәҺ1ж¬ЎпјҢжҜҸдёӘйӣ¶д»¶йғҪжҢүз…§дёҖе®ҡзҡ„йЎәеәҸиҝӣиЎҢеҠ е·ҘгҖӮ
дј з»ҹдҪңдёҡиҪҰй—ҙеёҰи°ғеәҰе®һдҫӢ

жңүиӢҘе№Іе·Ҙ件пјҢжҜҸдёӘе·Ҙ件жңүиӢҘе№Іе·ҘеәҸпјҢжңүеӨҡдёӘеҠ е·ҘжңәеҷЁпјҢдҪҶжҳҜжҜҸйҒ“е·ҘеәҸеҸӘиғҪеңЁдёҖеҸ°жңәеҷЁдёҠеҠ е·ҘгҖӮеҜ№еә”еҲ°дёҠйқўиЎЁж јдёӯзҡ„е®һдҫӢе°ұжҳҜпјҢдёӨдёӘе·Ҙ件пјҢе·Ҙ件J1жңүдёүйҒ“е·ҘеәҸпјҢе·ҘеәҸQ11еҸӘиғҪеңЁM3дёҠеҠ е·ҘпјҢеҠ е·Ҙж—¶й—ҙжҳҜ5е°Ҹж—¶гҖӮ
зәҰжқҹжҳҜеҜ№дәҺдёҖдёӘе·Ҙ件жқҘиҜҙпјҢе·ҘеәҸзҡ„зӣёеҜ№йЎәеәҸдёҚиғҪеҸҳгҖӮO11->O12->O13гҖӮжҜҸж—¶еҲ»пјҢжҜҸдёӘе·Ҙ件еҸӘиғҪеңЁдёҖеҸ°жңәеҷЁдёҠеҠ е·ҘпјӣжҜҸдёӘжңәеҷЁдёҠеҸӘиғҪжңүдёҖдёӘе·Ҙ件гҖӮ
и°ғеәҰзҡ„д»»еҠЎеҲҷжҳҜе®үжҺ’еҮәе·ҘеәҸзҡ„еҠ е·ҘйЎәеәҸпјҢеҠ е·ҘйЎәеәҸзЎ®е®ҡдәҶпјҢеӣ дёәжҜҸйҒ“е·ҘеәҸеҸӘжңүдёҖеҸ°жңәеҷЁеҸҜз”ЁпјҢеҠ е·Ҙзҡ„жңәеҷЁд№ҹе°ұзЎ®е®ҡдәҶгҖӮ
и°ғеәҰзҡ„зӣ®зҡ„жҳҜжҖ»зҡ„е®Ңе·Ҙж—¶й—ҙжңҖзҹӯпјҲд№ҹеҸҜд»ҘжҳҜе…¶д»–зӣ®ж ҮпјүгҖӮдёҫдёӘдҫӢеӯҗпјҢжҜ”еҰӮзЎ®е®ҡдәҶO21->O22->O11->O23->O12->O13зҡ„еҠ е·ҘйЎәеәҸд№ӢеҗҺпјҢжҲ‘们е°ұеҸҜд»Ҙж №жҚ®еҠ е·ҘжңәеҷЁзҡ„зәҰжқҹпјҢи®Ўз®—еҮәжҖ»зҡ„еҠ е·Ҙж—¶й—ҙгҖӮ
M2еҠ е·ҘO21ж¶ҲиҖ—6е°Ҹж—¶пјҢе·Ҙ件J2еҪ“еүҚеҠ е·Ҙж—¶й—ҙ6е°Ҹж—¶гҖӮ
M1еҠ е·ҘO22ж¶ҲиҖ—9е°Ҹж—¶пјҢе·Ҙ件J2еҪ“еүҚеҠ е·Ҙж—¶й—ҙ6+9=15е°Ҹж—¶гҖӮ
M3еҠ е·ҘO11ж¶ҲиҖ—5е°Ҹж—¶пјҢе·Ҙ件J1еҪ“еүҚеҠ е·Ҙж—¶й—ҙ5е°Ҹж—¶гҖӮ
M4еҠ е·ҘO23ж¶ҲиҖ—7е°Ҹж—¶пјҢе·Ҙ件J2еҠ е·Ҙж—¶й—ҙ15+7=22е°Ҹж—¶гҖӮ
M1еҠ е·ҘO12ж¶ҲиҖ—11е°Ҹж—¶пјҢдҪҶжҳҜиҰҒзӯүM1еҠ е·Ҙе®ҢO22д№ӢеҗҺжүҚејҖе§ӢеҠ е·ҘO12пјҢжүҖд»Ҙе·Ҙ件J1зҡ„еҪ“еүҚеҠ е·Ҙж—¶й—ҙдёәmax(5,9)+11=20е°Ҹж—¶гҖӮ
M5еҠ е·ҘO13ж¶ҲиҖ—8е°Ҹж—¶пјҢе·Ҙ件J2еҠ е·Ҙж—¶й—ҙ20+8=28е°Ҹж—¶гҖӮ
жҖ»зҡ„е®Ңе·Ҙж—¶й—ҙе°ұжҳҜmax(22,28)=28е°Ҹж—¶гҖӮ
жҹ”жҖ§дҪңдёҡиҪҰй—ҙеёҰи°ғеәҰе®һдҫӢпјҲеҸӮиҖғиҮӘй«ҳдә®иҖҒеёҲи®әж–Ү
гҖҠж”№иҝӣйҒ—дј з®—жі•жұӮи§Јжҹ”жҖ§дҪңдёҡиҪҰй—ҙи°ғеәҰй—®йўҳгҖӢ——жңәжў°е·ҘзЁӢеӯҰжҠҘпјү

зӣёжҜ”дәҺдј з»ҹдҪңдёҡиҪҰй—ҙи°ғеәҰпјҢжҹ”жҖ§дҪңдёҡиҪҰй—ҙи°ғеәҰж”ҫе®ҪдәҶеҜ№еҠ е·ҘжңәеҷЁзҡ„зәҰжқҹпјҢжӣҙз¬ҰеҗҲзҺ°е®һз”ҹдә§жғ…еҶөпјҢжҜҸдёӘе·ҘеәҸеҸҜйҖүеҠ е·ҘжңәеҷЁеҸҳжҲҗдәҶеӨҡдёӘпјҢеҸҜд»Ҙз”ұеӨҡдёӘеҠ е·ҘжңәеҷЁдёӯзҡ„дёҖдёӘеҠ е·ҘгҖӮжҜ”еҰӮдёҠиЎЁдёӯзҡ„е®һдҫӢпјҢJ1зҡ„O12е·ҘеәҸеҸҜд»ҘйҖүжӢ©M2е’ҢM4еҠ е·ҘпјҢеҠ е·Ҙж—¶й—ҙеҲҶеҲ«жҳҜ8е°Ҹж—¶е’Ң4е°Ҹж—¶пјҢдҪҶжҳҜ并дёҚдёҖе®ҡйҖүжӢ©M4еҠ е·ҘпјҢжңҖеҗҺеҫ—еҮәжқҘзҡ„жҖ»зҡ„е®Ңе·Ҙж—¶й—ҙе°ұжӣҙзҹӯпјҢжүҖд»ҘпјҢйңҖиҰҒи°ғеәҰз®—жі•жұӮи§ЈдјҳеҢ–гҖӮ
зӣёжҜ”дәҺдј з»ҹдҪңдёҡиҪҰй—ҙпјҢжҹ”жҖ§иҪҰй—ҙдҪңдёҡи°ғеәҰзҡ„и°ғеәҰд»»еҠЎдёҚд»…иҰҒзЎ®е®ҡе·ҘеәҸзҡ„еҠ е·ҘйЎәеәҸпјҢиҖҢдё”йңҖиҰҒзЎ®е®ҡжҜҸйҒ“е·ҘеәҸзҡ„жңәеҷЁеҲҶй…ҚгҖӮжҜ”еҰӮпјҢзЎ®е®ҡдәҶO21->O22->O11->O23->O12->O13зҡ„еҠ е·ҘйЎәеәҸпјҢжҲ‘们并дёҚиғҪзӣёеә”е·ҘеәҸзҡ„еҠ е·ҘжңәеҷЁпјҢжүҖд»Ҙиҝҳеә”иҜҘзЎ®е®ҡеҜ№еә”зҡ„[M1гҖҒM3гҖҒM5]->[M1гҖҒM2гҖҒM3]->[M1гҖҒM2гҖҒM3гҖҒM4гҖҒM5]->[M2гҖҒM3гҖҒM4гҖҒM5]->[M2гҖҒM4]->[M1гҖҒM3гҖҒM4гҖҒM5]зҡ„жңәеҷЁз»„еҗҲгҖӮи°ғеәҰзҡ„зӣ®зҡ„иҝҳжҳҜжҖ»зҡ„е®Ңе·Ҙж—¶й—ҙжңҖзҹӯпјҲд№ҹеҸҜд»ҘжҳҜе…¶д»–зӣ®ж ҮпјҢжҜ”еҰӮжңәеҷЁжңҖеӨ§иҙҹиҚ·жңҖзҹӯгҖҒжҖ»зҡ„жңәеҷЁиҙҹиҚ·жңҖзҹӯпјү
иқҙиқ¶дјҳеҢ–з®—жі•(butterfly optimization algorithm, BOA)жҳҜArora зӯүдәәдәҺ2019е№ҙжҸҗеҮәзҡ„дёҖз§Қе…ғеҗҜеҸ‘ејҸжҷәиғҪз®—жі•гҖӮиҜҘз®—жі•еҸ—еҲ°дәҶиқҙиқ¶и§…йЈҹе’ҢдәӨй…ҚиЎҢдёәзҡ„еҗҜеҸ‘пјҢиқҙиқ¶жҺҘ收/ж„ҹзҹҘ并еҲҶжһҗз©әж°”дёӯзҡ„ж°”е‘іпјҢд»ҘзЎ®е®ҡйЈҹзү©жқҘжәҗ/дәӨй…Қдјҷдјҙзҡ„жҪңеңЁж–№еҗ‘гҖӮ
иқҙиқ¶еҲ©з”Ёе®ғ们зҡ„е—…и§үгҖҒи§Ҷи§үгҖҒе‘іи§үгҖҒи§Ұи§үе’Ңеҗ¬и§үжқҘеҜ»жүҫйЈҹзү©е’ҢдјҙдҫЈпјҢиҝҷдәӣж„ҹи§үд№ҹжңүеҠ©дәҺе®ғ们д»ҺдёҖдёӘең°ж–№иҝҒеҫҷеҲ°еҸҰдёҖдёӘең°ж–№пјҢйҖғзҰ»жҚ•йЈҹиҖ…并еңЁеҗҲйҖӮзҡ„ең°ж–№дә§еҚөгҖӮеңЁжүҖжңүж„ҹи§үдёӯпјҢе—…и§үжҳҜжңҖйҮҚиҰҒзҡ„пјҢе®ғеё®еҠ©иқҙиқ¶еҜ»жүҫйЈҹзү©пјҲйҖҡеёёжҳҜиҠұиңңпјүгҖӮиқҙиқ¶зҡ„е—…и§үж„ҹеҸ—еҷЁеҲҶж•ЈеңЁиқҙиқ¶зҡ„иә«дҪ“йғЁдҪҚпјҢеҰӮи§Ұи§’гҖҒи…ҝгҖҒи§ҰйЎ»зӯүгҖӮиҝҷдәӣж„ҹеҸ—еҷЁе®һйҷ…дёҠжҳҜиқҙиқ¶дҪ“иЎЁзҡ„зҘһз»Ҹз»ҶиғһпјҢиў«з§°дёәеҢ–еӯҰж„ҹеҸ—еҷЁгҖӮе®ғеј•еҜјиқҙиқ¶еҜ»жүҫжңҖдҪізҡ„дәӨй…ҚеҜ№иұЎпјҢд»Ҙ延з»ӯејәеӨ§зҡ„йҒ—дј еҹәеӣ гҖӮйӣ„жҖ§иқҙиқ¶иғҪеӨҹйҖҡиҝҮдҝЎжҒҜзҙ иҜҶеҲ«йӣҢжҖ§иқҙиқ¶пјҢдҝЎжҒҜзҙ жҳҜйӣҢжҖ§иқҙиқ¶еҸ‘еҮәзҡ„ж°”е‘іеҲҶжіҢзү©пјҢдјҡеј•иө·зү№е®ҡзҡ„еҸҚеә”гҖӮ
йҖҡиҝҮи§ӮеҜҹпјҢеҸ‘зҺ°иқҙиқ¶еҜ№иҝҷдәӣжқҘжәҗзҡ„дҪҚзҪ®жңүйқһеёёеҮҶзЎ®зҡ„еҲӨж–ӯгҖӮжӯӨеӨ–пјҢе®ғ们еҸҜд»ҘиҫЁиҜҶеҮәдёҚеҗҢзҡ„йҰҷе‘іпјҢ并ж„ҹзҹҘе®ғ们зҡ„ејәеәҰгҖӮиқҙиқ¶дјҡдә§з”ҹдёҺе…¶йҖӮеә”еәҰзӣёе…ізҡ„жҹҗз§ҚејәеәҰзҡ„йҰҷе‘іпјҢеҚіеҪ“иқҙиқ¶д»ҺдёҖдёӘдҪҚзҪ®з§»еҠЁеҲ°еҸҰдёҖдёӘдҪҚзҪ®ж—¶пјҢе®ғзҡ„йҖӮеә”еәҰдјҡзӣёеә”ең°еҸҳеҢ–гҖӮеҪ“иқҙиқ¶ж„ҹи§үеҲ°еҸҰдёҖеҸӘиқҙиқ¶еңЁиҝҷдёӘеҢәеҹҹж•ЈеҸ‘еҮәжӣҙеӨҡзҡ„йҰҷе‘іж—¶пјҢе°ұдјҡеҺ»йқ иҝ‘пјҢиҝҷдёӘйҳ¶ж®өиў«з§°дёәе…ЁеұҖжҗңзҙўгҖӮеҸҰеӨ–дёҖз§Қжғ…еҶөпјҢеҪ“иқҙиқ¶дёҚиғҪж„ҹзҹҘеӨ§дәҺе®ғиҮӘе·ұзҡ„йҰҷе‘іж—¶пјҢе®ғдјҡйҡҸжңә移еҠЁпјҢиҝҷдёӘйҳ¶ж®өз§°дёәеұҖйғЁжҗңзҙўгҖӮ
дёәдәҶзҗҶи§ЈBOAдёӯзҡ„йҰҷе‘іжҳҜеҰӮдҪ•и®Ўз®—зҡ„пјҢйҰ–е…ҲйңҖиҰҒзҗҶи§ЈпјҢеғҸж°”е‘ігҖҒеЈ°йҹігҖҒе…үгҖҒжё©еәҰзӯүиҝҷж ·зҡ„жЁЎжҖҒжҳҜеҰӮдҪ•и®Ўз®—зҡ„гҖӮж„ҹзҹҘгҖҒеӨ„зҗҶиҝҷдәӣжЁЎжҖҒйңҖиҰҒзҹҘйҒ“дёүдёӘйҮҚиҰҒзҡ„жңҜиҜӯпјҡж„ҹи§үжЁЎжҖҒCгҖҒеҲәжҝҖејәеәҰIе’Ңе№ӮжҢҮж•°aгҖӮеңЁж„ҹи§үжЁЎжҖҒдёӯпјҢж„ҹи§үж„Ҹе‘ізқҖжөӢйҮҸиғҪйҮҸзҡ„еҪўејҸ并д»Ҙзұ»дјјж–№ејҸеҜ№е…¶иҝӣиЎҢеӨ„зҗҶпјҢиҖҢжЁЎжҖҒжҳҜжҢҮдј ж„ҹеҷЁдҪҝз”Ёзҡ„еҺҹе§Ӣиҫ“е…ҘгҖӮдёҚеҗҢзҡ„еҪўжҖҒеҸҜд»ҘжҳҜж°”е‘іпјҢеЈ°йҹіпјҢе…үзәҝпјҢжё©еәҰпјҢеңЁBOAдёӯпјҢжЁЎжҖҒжҳҜйҰҷе‘ігҖӮIжҳҜзү©зҗҶеҲәжҝҖзҡ„еӨ§е°ҸгҖӮеңЁBOAдёӯпјҢIдёҺиқҙиқ¶/и§ЈеҶіж–№жЎҲзҡ„йҖӮеә”еәҰзӣёе…ігҖӮиҝҷж„Ҹе‘ізқҖпјҢеҪ“дёҖеҸӘиқҙиқ¶ж•ЈеҸ‘еҮәжӣҙеӨҡзҡ„йҰҷе‘іж—¶пјҢе‘Ёеӣҙзҡ„е…¶д»–иқҙиқ¶еҸҜд»Ҙж„ҹзҹҘеҲ°е№¶иў«еҗёеј•гҖӮе№ӮжҳҜејәеәҰеўһеҠ зҡ„жҢҮж•°гҖӮеҸӮж•°aе…Ғи®ёжӯЈеҲҷиЎЁиҫҫејҸгҖҒзәҝжҖ§е“Қеә”е’Ңе“Қеә”еҺӢзј©гҖӮе“Қеә”жү©еұ•жҳҜеҪ“IеўһеҠ ж—¶пјҢйҰҷе‘іпјҲfпјүжҜ”Iеўһй•ҝжӣҙеҝ«гҖӮе“Қеә”еҺӢзј©жҳҜеҪ“IеўһеҠ ж—¶пјҢfжҜ”Iеўһй•ҝж…ўгҖӮзәҝжҖ§е“Қеә”жҳҜеҪ“IеўһеҠ ж—¶пјҢfжҲҗжҜ”дҫӢең°еўһеҠ гҖӮз»Ҹе®һйӘҢиҜҒжҳҺпјҢжңүж—¶йҡҸзқҖеҲәжҝҖзҡ„еўһејәпјҢжҳҶиҷ«еҜ№еҲәжҝҖеҸҳеҢ–зҡ„ж•Ҹж„ҹжҖ§еҸҳеҫ—и¶ҠжқҘи¶ҠдҪҺгҖӮеӣ жӯӨеңЁBOAдёӯпјҢдёәдәҶдј°и®ЎIзҡ„еӨ§е°ҸпјҢдҪҝз”ЁдәҶе“Қеә”еҺӢзј©гҖӮ
иқҙиқ¶зҡ„иҮӘ然зҺ°иұЎеҹәдәҺдёӨдёӘйҮҚиҰҒй—®йўҳпјҡIзҡ„еҸҳеҢ–е’Ңfзҡ„иЎЁзӨәгҖӮз®ҖеҚ•ең°иҜҙпјҢиқҙиқ¶зҡ„IдёҺзј–з ҒеҗҺзҡ„зӣ®ж ҮеҮҪж•°зӣёе…іиҒ”гҖӮдҪҶжҳҜпјҢfжҳҜзӣёеҜ№зҡ„пјҢеҚіеә”иҜҘз”ұе…¶д»–иқҙиқ¶жқҘж„ҹзҹҘгҖӮеҸІи’Ӯж–Үж–Ҝе№Ӯе®ҡеҫӢдёӯпјҢдёәдәҶе°Ҷж°”е‘ідёҺе…¶д»–еҪўејҸеҢәеҲ«ејҖжқҘпјҢдҪҝз”ЁдәҶCгҖӮзҺ°еңЁпјҢеҪ“Iиҫғе°‘зҡ„иқҙиқ¶еҗ‘IиҫғеӨҡзҡ„иқҙиқ¶з§»еҠЁж—¶пјҢfжҜ”IеўһеҠ еҫ—жӣҙеҝ«гҖӮеӣ жӯӨпјҢжҲ‘们еә”иҜҘе…Ғи®ёfйҡҸе№ӮжҢҮж•°еҸӮж•°aе®һзҺ°зҡ„еҗёж”¶зЁӢеәҰиҖҢеҸҳеҢ–гҖӮеңЁBOAдёӯпјҢйҰҷе‘іиў«иЎЁзӨәдёәеҲәжҝҖзү©зҡ„зү©зҗҶејәеәҰзҡ„еҮҪж•°пјҢеҰӮдёӢжүҖзӨәпјҡ

дёәдәҶз”Ёжҗңзҙўз®—жі•жј”зӨәдёҠиҝ°и®Ёи®әпјҢе°Ҷиқҙиқ¶зҡ„дёҠиҝ°зү№еҫҒзҗҶжғіеҢ–еҰӮдёӢпјҡ
пјҲ1пјүжүҖжңүзҡ„иқҙиқ¶йғҪеҸҜд»ҘеҸ‘еҮәж°”е‘іпјҢиҝҷдҪҝиқҙиқ¶й—ҙзӣёдә’еҗёеј•гҖӮ
пјҲ2пјүжҜҸеҸӘиқҙиқ¶йғҪдјҡйҡҸжңә移еҠЁжҲ–жңқжңҖеҘҪзҡ„иқҙиқ¶з§»еҠЁпјҢж•ЈеҸ‘еҮәжӣҙеӨҡзҡ„иҠійҰҷгҖӮ
пјҲ3пјүиқҙиқ¶зҡ„еҲәжҝҖејәеәҰеҸ—зӣ®ж ҮеҮҪж•°зҡ„жҷҜи§ӮеҪұе“ҚжҲ–еҶіе®ҡгҖӮ
иҜҘз®—жі•еҲҶдёәдёүдёӘйҳ¶ж®өпјҡ(1)еҲқе§ӢеҢ–йҳ¶ж®өгҖҒ(2)иҝӯд»Јйҳ¶ж®өе’Ң(3)з»“жқҹйҳ¶ж®өгҖӮ
еңЁBOAзҡ„жҜҸж¬ЎиҝҗиЎҢдёӯпјҢйҰ–е…Ҳжү§иЎҢеҲқе§ӢеҢ–йҳ¶ж®өпјҢ然еҗҺиҝӣиЎҢиҝӯд»ЈжҗңзҙўпјҢжңҖеҗҺеңЁжүҫеҲ°жңҖдјҳи§Јж—¶з»Ҳжӯўз®—жі•гҖӮBOAдёӯдҪҝз”Ёзҡ„еҸӮж•°еҖјд№ҹдјҡиў«еҲҶй…ҚпјҢи®ҫзҪ®иҝҷдәӣеҖјеҗҺпјҢз®—жі•е°Ҷ继з»ӯеҲӣе»әеҲқе§Ӣиқҙиқ¶з§ҚзҫӨд»ҘиҝӣиЎҢдјҳеҢ–гҖӮз”ұдәҺеңЁBOAзҡ„жЁЎжӢҹиҝҮзЁӢдёӯиқҙиқ¶жҖ»ж•°дҝқжҢҒдёҚеҸҳпјҢеҲҶй…ҚдәҶдёҖдёӘеӣәе®ҡеӨ§е°Ҹзҡ„еҶ…еӯҳжқҘеӯҳеӮЁдҝЎжҒҜгҖӮиқҙиқ¶зҡ„дҪҚзҪ®жҳҜеңЁжҗңзҙўз©әй—ҙдёӯйҡҸжңәз”ҹжҲҗзҡ„пјҢ并计算е’ҢеӯҳеӮЁе®ғ们зҡ„йҰҷе‘іе’ҢйҖӮеә”еҖјгҖӮиҝҷж ·е°ұе®ҢжҲҗдәҶеҲқе§ӢеҢ–йҳ¶ж®өпјҢз®—жі•ејҖе§ӢдәҶиҝӯд»Јйҳ¶ж®өпјҢиҜҘйҳ¶ж®өдҪҝз”ЁеҲӣе»әзҡ„дәәе·Ҙиқ¶еҪўжү§иЎҢжҗңзҙўгҖӮз®—жі•зҡ„第дәҢйҳ¶ж®өпјҢеҚіиҝӯд»Јйҳ¶ж®өпјҢз”ұз®—жі•жү§иЎҢеӨҡж¬Ўиҝӯд»ЈгҖӮеңЁжҜҸж¬Ўиҝӯд»ЈдёӯпјҢи§Јз©әй—ҙдёӯзҡ„жүҖжңүиқ¶еҪўйғҪ移еҲ°ж–°дҪҚзҪ®пјҢ然еҗҺйҮҚж–°иҜ„дј°е…¶йҖӮеә”жҖ§еҖјгҖӮз®—жі•йҰ–е…Ҳи®Ўз®—и§Јз©әй—ҙдёӯдёҚеҗҢдҪҚзҪ®зҡ„жүҖжңүиқҙиқ¶зҡ„йҖӮеә”еәҰеҖјгҖӮйӮЈд№Ҳиҝҷдәӣиқҙиқ¶е°ұдјҡеҲ©з”ЁејҸ1еңЁиҮӘе·ұзҡ„дҪҚзҪ®дә§з”ҹйҰҷе‘ігҖӮиҜҘз®—жі•жңүдёӨдёӘе…ій”®жӯҘйӘӨпјҢеҚіе…ЁеұҖжҗңзҙўйҳ¶ж®өе’ҢеұҖйғЁжҗңзҙўйҳ¶ж®өгҖӮеңЁе…ЁеұҖжҗңзҙўйҳ¶ж®өпјҢиқҙиқ¶еҗ‘жңҖеҗҲйҖӮзҡ„иқҙиқ¶/и§Јg∗иҝҲеҮәдёҖжӯҘпјҢиҜҘиқҙиқ¶/и§ЈgеҸҜд»Ҙз”Ёе…¬ејҸ(2)жқҘиЎЁзӨәгҖӮ

иҝҷйҮҢпјҢg∗иЎЁзӨәеңЁеҪ“еүҚиҝӯд»Јзҡ„жүҖжңүи§ЈдёӯжүҫеҲ°зҡ„еҪ“еүҚжңҖдҪіи§ЈпјӣfiиЎЁзӨә第iеҸӘиқҙиқ¶зҡ„йҰҷе‘іпјҢrжҳҜ[0пјҢ1]дёӯзҡ„йҡҸжңәж•°гҖӮеұҖйғЁжҗңзҙўйҳ¶ж®өеҸҜд»ҘиЎЁзӨәдёә

е…¶дёӯпјҢxjtе’ҢxktжҳҜи§Јз©әй—ҙдёӯзҡ„第jдёӘиқҙиқ¶е’Ң第kдёӘиқҙиқ¶гҖӮ
иқҙиқ¶еҜ»жүҫйЈҹзү©гҖҒдәӨй…ҚдјҷдјҙеҸҜд»ҘеңЁеұҖйғЁе’Ңе…ЁеұҖиҢғеӣҙеҶ…еҸ‘з”ҹгҖӮиҖғиҷ‘еҲ°ең°зҗҶдёҠзҡ„жҺҘиҝ‘е’Ңеҗ„з§Қе…¶д»–еӣ зҙ пјҢеҰӮйӣЁгҖҒйЈҺзӯүпјҢеңЁж•ҙдёӘдәӨй…ҚдјҷдјҙжҲ–иқҙиқ¶зҡ„и§…йЈҹжҙ»еҠЁдёӯпјҢеҜ»жүҫйЈҹзү©еҸҜиғҪеҚ еҫҲеӨ§жҜ”дҫӢгҖӮеӣ жӯӨпјҢеңЁBOAдёӯдҪҝз”ЁеҲҮжҚўжҰӮзҺҮpжқҘеңЁжҷ®йҖҡе…ЁеұҖжҗңзҙўе’ҢеҜҶйӣҶеұҖйғЁжҗңзҙўд№Ӣй—ҙеҲҮжҚўгҖӮ
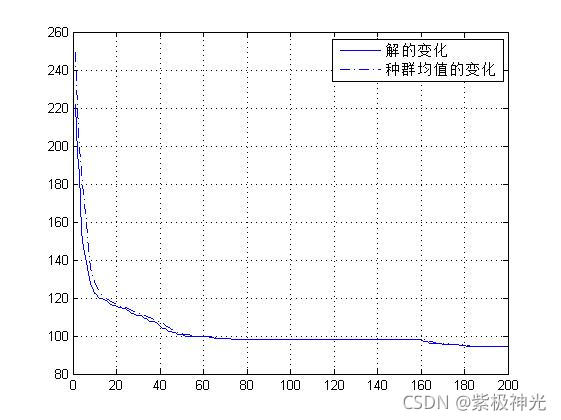
еңЁжңӘиҫҫеҲ°еҒңжӯўж ҮеҮҶд№ӢеүҚпјҢдёҖзӣҙиҝӣиЎҢиҝӯд»ЈгҖӮиҝӯд»Јз»“жқҹзҡ„ж ҮеҮҶеҸҜд»ҘжңүеӨҡдёӘпјҢеҰӮдҪҝз”Ёзҡ„жңҖеӨ§CPUж—¶й—ҙгҖҒиҫҫеҲ°зҡ„жңҖеӨ§иҝӯд»Јж¬Ўж•°гҖҒжІЎжңүж”№иҝӣзҡ„жңҖеӨ§иҝӯд»Јж¬Ўж•°гҖҒиҫҫеҲ°й”ҷиҜҜзҺҮзҡ„зү№е®ҡеҖјжҲ–д»»дҪ•е…¶д»–йҖӮеҪ“зҡ„ж ҮеҮҶгҖӮеҪ“иҝӯд»Јйҳ¶ж®өз»“жқҹж—¶пјҢз®—жі•иҫ“еҮәе…·жңүжңҖдҪійҖӮеә”еәҰзҡ„жңҖдјҳи§ЈгҖӮ
clc;clear
%% дёӢиҪҪж•°жҚ®
% еҠ е·Ҙж•°жҚ®еҢ…жӢ¬еҠ е·Ҙж—¶й—ҙпјҢеҠ е·ҘжңәеҷЁпјҢжңәеҷЁж•°пјҢеҗ„жңәеҷЁжқғйҮҚпјҢе·Ҙ件数пјҢеҗ„е·Ҙ件еҜ№еә”зҡ„е·ҘеәҸж•°
load data operation_time operation_machine num_machine machine_weight num_job num_op
%% еҹәжң¬еҸӮж•°
MAXGEN=200; % жңҖеӨ§иҝӯд»Јж¬Ўж•°
sizepop=201; % з§ҚзҫӨ规模
e=0.5; % зӣ®ж ҮеҖјжқғйҮҚ
N_size=30; % йӮ»еҹҹи§Јж•°йҮҸ
S_size=15; % е…ұдә«и§Јж•°йҮҸ
G=5; % е·Ўеӣһж¬Ўж•°
G1=20; % з«һдәүжңәеҲ¶1еҸӮж•°
G2=10; % з«һдәүжңәеҲ¶2еҸӮж•°
trace=zeros(2,MAXGEN);
chrom_best=[];
%% ===========================з§ҚзҫӨеҲқе§ӢеҢ–============================
total_op_num=sum(num_op);
chroms=initialization(num_op,num_job,total_op_num,sizepop,operation_machine,operation_time);
[Z,~,~,~,~]=fitness(chroms,num_machine,e,num_job,num_op);
% е°ҶжңҖеҘҪзҡ„и§ЈеҲ’еҲҶдёәйўҶйЈһйёҹ
[Z_leader,ind]=min(Z);
leader=chroms(ind,:);
% д»Һchromsдёӯ移еҮәйўҶйЈһйёҹпјҢ然еҗҺеҲ’еҲҶе·ҰеҸідёӨдёӘи·ҹйЈһйёҹз§ҚзҫӨ
chroms(ind,:)=[];
Z(ind)=[];
sp=(sizepop-1)/2;
lefts=chroms(1:sp,:);
Z_left=Z(1:sp);
rights=chroms(sp+1:end,:);
Z_right=Z(sp+1:end);
%% еҖҷйёҹз®—жі•дёӯзҡ„дәӨеҸүеҮҪж•°дёҺйҒ—дј з®—жі•зҡ„дёҚеҗҢ
%% еҖҷйёҹз®—жі•иҫ“е…ҘдёӨдёӘжҹ“иүІдҪ“з§ҚзҫӨпјҢеҲҶеҲ«жқҘиҮӘе·ҰеҸійҳҹеҲ—
%--------------------------------------------------------------------------
function [lefts,Z_left,rights,Z_right]= crossover(lefts,rights,Z_left,Z_right,total_op_num,num_machine,e,num_job,num_op)
chroms1=lefts;
chroms2=rights;
for i=1:size(chroms1,1)
%% йқўеҗ‘е·ҘеәҸз Ғзҡ„дәӨеҸүж“ҚдҪң
% зҲ¶д»Јжҹ“иүІдҪ“
parent1=lefts(i,:);
parent2=rights(i,:);
Job=randperm(num_job);
% е°Ҷе·Ҙ件йҡҸжңәеҲҶжҲҗдёӨдёӘйӣҶеҗҲ
J1=Job(1:round(num_job/2));
J2=Job(length(J1)+1:end);
op_p1=[];
op_p2=[];
for j=1:length(J2)
%жүҫеҮәзҲ¶д»ЈдёӯJ2зүҮж®өеҜ№еә”зҡ„дҪҚзҪ®
op_p1=[op_p1,find(parent1(1:total_op_num)==J2(j))];
op_p2=[op_p2,find(parent2(1:total_op_num)==J2(j))];
end
op_s1=sort(op_p1);
op_s2=sort(op_p2);
% еӯҗд»Ј1дәӨжҚўJ2зүҮж®өзҡ„еҹәеӣ пјҢжңәеҷЁз ҒеҜ№еә”дҪҚзҪ®зҡ„еҹәеӣ пјҢе·Ҙж—¶з ҒеҜ№еә”дҪҚзҪ®зҡ„еҹәеӣ
chroms1(i,op_s1)=parent2(op_s2);
chroms1(i,total_op_num+op_s1)=parent2(total_op_num+op_s2);
chroms1(i,total_op_num*2+op_s1)=parent2(total_op_num*2+op_s2);
% еӯҗд»Ј2еҗҢзҗҶ
chroms2(i,op_s2)=parent1(op_s1);
chroms2(i,total_op_num+op_s2)=parent1(total_op_num+op_s1);
chroms2(i,total_op_num*2+op_s2)=parent1(total_op_num*2+op_s1);
%% йқўеҗ‘жңәеҷЁз Ғзҡ„дәӨеҸүж“ҚдҪң
parent1=chroms1(i,:);
parent2=chroms2(i,:);
% йҡҸжңәдә§з”ҹдёҺжҹ“иүІдҪ“й•ҝеәҰзӣёзӯүзҡ„0,1еәҸеҲ—
rand0_1=randi([0,1],1,total_op_num);
for n=1:num_job
ind_0=find(rand0_1(num_op(n)*(n-1)+1:num_op(n)*n)==0);
if ~isempty(ind_0)
ind1=find(parent1(1:total_op_num)==n);
ind2=find(parent2(1:total_op_num)==n);
chroms1(i,total_op_num+ind1(ind_0))=parent2(total_op_num+ind2(ind_0));
chroms1(i,total_op_num*2+ind1(ind_0))=parent2(total_op_num*2+ind2(ind_0));
chroms2(i,total_op_num+ind2(ind_0))=parent1(total_op_num+ind1(ind_0));
chroms2(i,total_op_num*2+ind2(ind_0))=parent1(total_op_num*2+ind1(ind_0));
end
end
end
%% еҲӨж–ӯдёӘдҪ“жҳҜеҗҰеҸҜд»Ҙжӣҙж–°
[Z1,~,~,~,~]=fitness(chroms1,num_machine,e,num_job,num_op);
[Z2,~,~,~,~]=fitness(chroms2,num_machine,e,num_job,num_op);
lefts(Z1<Z_left,:)=chroms1(Z1<Z_left,:);
Z_left(Z1<Z_left)=Z1(Z1<Z_left);
rights(Z2<Z_right,:)=chroms2(Z2<Z_right,:);
Z_right(Z2<Z_right)=Z2(Z2<Z_right);
function [Z,makespan,machine_load,machine_weight,pvals] = fitness(chroms,num_machine,e,num_job,num_op)
sizepop=size(chroms,1);
pvals=cell(1,sizepop);
makespan=zeros(1,sizepop);
machine_load=makespan;
total_op_num=sum(num_op); % жҖ»е·ҘеәҸж•°
for k=1:sizepop
chrom=chroms(k,:);
machine=zeros(1,num_machine); % и®°еҪ•еҗ„жңәеҷЁеҸҳеҢ–ж—¶й—ҙ
job=zeros(1,num_job); % и®°еҪ•еҗ„е·Ҙ件еҸҳеҢ–ж—¶й—ҙ
machine_time=zeros(1,num_machine); % и®Ўз®—еҗ„жңәеҷЁзҡ„е®һйҷ…еҠ е·Ҙж—¶й—ҙ
pval=zeros(2,total_op_num); % и®°еҪ•еҗ„е·ҘеәҸејҖе§Ӣе’Ңз»“жқҹж—¶й—ҙ
for i=1:total_op_num
else
pval(1,i)=job(chrom(i));
job(chrom(i))=job(chrom(i))+chrom(total_op_num*2+i);
machine(chrom(total_op_num+i))=job(chrom(i));
pval(2,i)=job(chrom(i));
end
machine_time(chrom(total_op_num+i))=machine_time(chrom(total_op_num+i))+chrom(total_op_num*2+i);
end
makespan(k)=max(machine);
machine_weight=machine_time;
machine_load(k)=max(machine_weight)-min(machine_weight);
pvals{k}=pval;
end
Z=e*makespan+(1-e)*machine_load;еӣӣгҖҒиҝҗиЎҢз»“жһң
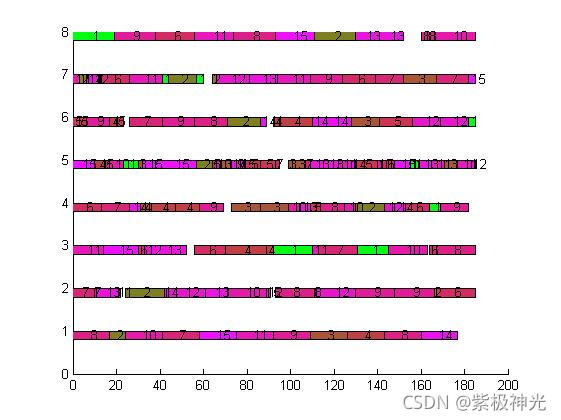

ж„ҹи°ўдҪ иғҪеӨҹи®Өзңҹйҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« пјҢеёҢжңӣе°Ҹзј–еҲҶдә«зҡ„вҖңеҰӮдҪ•дҪҝз”ЁmatlabйёҹзҫӨз®—жі•жұӮи§ЈиҪҰй—ҙи°ғеәҰй—®йўҳвҖқиҝҷзҜҮж–Үз« еҜ№еӨ§е®¶жңүеё®еҠ©пјҢеҗҢж—¶д№ҹеёҢжңӣеӨ§е®¶еӨҡеӨҡж”ҜжҢҒдәҝйҖҹдә‘пјҢе…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“пјҢжӣҙеӨҡзӣёе…ізҹҘиҜҶзӯүзқҖдҪ жқҘеӯҰд№ !
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ