您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
稀疏矩阵:矩阵中大多数元素为0的矩阵,从直观上讲,当非零元素个数低于总元素的30%时,这样的矩阵为稀疏矩阵。
如:
int array [6][5] = {{1, 0, 3, 0, 5},
{0, 0, 0, 0, 0},
{0, 0, 0, 0, 0},
{1, 0, 3, 0, 5},
{0, 0, 0, 0, 0},
{0, 0, 0, 0, 0}};
稀疏矩阵的压缩存储:使用{row,col,value}三元组存储每一个有效数据,三元组按原矩阵中的位置,以行优先级先后顺序依次存放。
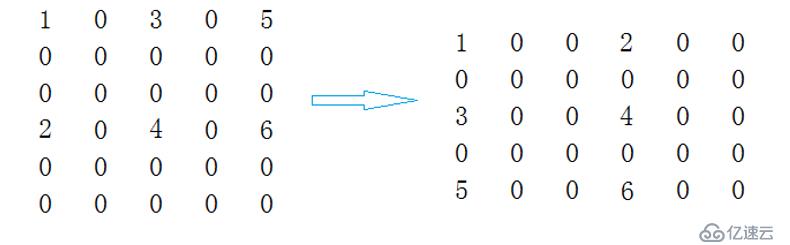
矩阵的转置:将原矩阵的行、列对换,也就是将[i][j]和[j][i]位置上的数据对换。
稀疏矩阵的列序递增法:
按照被转置矩阵三元组表A的序列(即转置后三元组表B的行序)递增的顺序进行转置,则转置后矩阵的三元组表B恰好是以“行序为主序的”.
一次定位快速转置法:
在列转置中算法的时间浪费主要在双重循环中,要改善算法的性能,必须去掉双重循环,使得整个转置过程通过一次循环来完成。
为了使得被转置的三元组表A中元素一次定位到三元组表B中,需要计算一下以下数据:
1)RowCounts,三元组表A中每一列有效值的个数,即转置后矩阵三元组表B中每一行有效值的个数。
2)RowStart,三元组表B中每一行有效值的起始位置。
RowStart[i] = RowStart[i - 1] + RowCounts[i - 1];
代码实现:
#include <iostream>
using namespace std;
#include <vector>//动态数组
//三元组
template<class T>
struct Triple
{
size_t _row;
size_t _col;
T _value;
Triple(size_t row = 0, size_t col = 0, const T& value = T())
:_row(row)
, _col(col)
, _value(value)
{}
};
template<class T>
class SparseMatrix
{
public://invalid 非零值
SparseMatrix(T* a = NULL, size_t M = 0, size_t N = 0, const T& invalid = T())
:_rowSize(M)
, _colSize(N)
, _invalid(invalid)
{
for (size_t i = 0; i < M; ++i)
{
for (size_t j = 0; j < N; ++j)
{
if (a[i*N + j] != _invalid)//每行元素个数就是列的个数
{
Triple<T> t;
t._row = i;
t._col = j;
t._value = a[i*N + j];
_a.push_back(t);//在Vector类,插入一个元素
}
}
}
}
void Display()
{
size_t index = 0;
for (size_t i = 0; i < _rowSize; ++i)
{
for (size_t j = 0; j < _colSize; ++j)
{
if (index < _a.size()&& (_a[index]._row == i)&& (_a[index]._col == j))
{
cout << _a[index++]._value << " ";
}
else
{
cout << _invalid << " ";
}
}
cout << endl;
}
}
//矩阵列序递增转置算法,时间复杂度为O(有效数据的个数*原矩阵的列数)
SparseMatrix<T> Transport()
{
SparseMatrix<T> sm;
sm._colSize = _rowSize;
sm._rowSize = _colSize;
sm._invalid = _invalid;
for (size_t i = 0; i < _colSize; ++i)//列序递增
{
size_t index = 0;
while (index < _a.size())
{
if (_a[index]._col == i)
{
Triple<T> t;
t._row = _a[index]._col;
t._col = _a[index]._row;
t._value = _a[index]._value;
sm._a.push_back(t);
}
++index;
}
}
return sm;
}
//一次定位计数快速转置 时间复杂度为O(有效数据的个数+原矩阵的列数)
SparseMatrix<T> FastTransport()
{
SparseMatrix<T> sm;
sm._rowSize = _colSize;
sm._colSize = _rowSize;
sm._invalid = _invalid;
int* RowCounts = new int[_colSize];//计数
int* RowStart = new int[_colSize];//位置
memset(RowCounts, 0, sizeof(int)*_colSize);
memset(RowStart, 0, sizeof(int)*_colSize);
size_t index = 0;//index 非零元素
while (index < _a.size())
{
++RowCounts[_a[index]._col];
++index;
}
for (size_t i = 1; i < _colSize; ++i)
{
RowStart[i] = RowStart[i - 1] + RowCounts[i - 1];
}
index = 0;
sm._a.resize(_a.size());
while (index < sm._a.size())
{
Triple<T> t;
t._row = _a[index]._col;
t._col = _a[index]._row;
t._value = _a[index]._value;
sm._a[RowStart[_a[index]._col]] = t;
++RowStart[_a[index]._col];
++index;
}
delete[] RowCounts;
delete[] RowStart;
return sm;
}
protected:
vector<Triple<T>> _a;
size_t _rowSize;
size_t _colSize;
T _invalid;
};
void Test()
{
int array[5][4] =
{
{ 1, 0, 3, 0 },
{ 0, 0, 0, 0 },
{ 0, 0, 0, 0 },
{ 2, 0, 4, 5 },
{ 0, 0, 0, 0 },
};
SparseMatrix<int> sm1((int*)array, 5, 4, 0);
cout << "打印原矩阵:"<<endl;
sm1.Display();
cout << endl;
cout << "打印转置后的矩阵:" << endl;
SparseMatrix<int> sm2 = sm1.Transport();
/*SparseMatrix<int> sm2 = sm1.FastTransport();*/
sm2.Display();
}
int main()
{
Test();
system("pause");
return 0;
}
运行结果:
打印原矩阵:
1 0 3 0
0 0 0 0
0 0 0 0
2 0 4 5
0 0 0 0
打印转置后的矩阵:
1 0 0 2 0
0 0 0 0 0
3 0 0 4 0
0 0 0 5 0
请按任意键继续. . .
两种算法比较:
假设有效数据的个数为100,原矩阵的列数为100,矩阵列序递增转置算法,时间耗费为O(有效数据的个数*原矩阵的列数),即100*100=10000次;一次定位计数快速转置算法,时间复杂度为O(有效数据的个数+原矩阵的列数),即100+100=200次左右。显然一次定位计数快速转置算法的时间效率要高的多,在时间性能上优于列序递增转置法,但是在空间耗费上增加了两个辅助向量空间,即RowCounts和RowStart,由此可见,算法在时间上的节省是以更多的存储空间为代价的。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。