жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ
еҜҶз Ғзҷ»еҪ•
зҷ»еҪ•жіЁеҶҢ
зӮ№еҮ» зҷ»еҪ•жіЁеҶҢ еҚіиЎЁзӨәеҗҢж„ҸгҖҠдәҝйҖҹдә‘з”ЁжҲ·жңҚеҠЎжқЎж¬ҫгҖӢ
зҹ©йҳөжҲ‘们еңЁзәҝжҖ§д»Јж•°дёӯжүҖеӯҰзҡ„дёҖз§ҚжңүеҠӣзҡ„е·Ҙе…·пјҢеҸҜз”Ёе®ғеҸҜд»ҘеӨ„зҗҶеҫҲеӨҡзҡ„е·ҘзЁӢй—®йўҳгҖӮд»ҠеӨ©пјҢжҲ‘们дёҚи®Ёи®әзҹ©йҳөжң¬иә«пјҢиҖҢжҳҜз ”з©¶еҰӮдҪ•жқҘеӯҳеӮЁзҹ©йҳөпјҢдҪҝеҫ—зҹ©йҳөзҡ„иҝҗз®—иғҪеӨҹжӣҙеҠ й«ҳж•ҲгҖӮ
йҰ–е…ҲпјҢжҲ‘们дәҶи§Јзҹ©йҳөдёӯзҡ„дёҖз§Қзү№ж®Ҡзҹ©йҳөвҖ”вҖ”>зЁҖз–Ҹзҹ©йҳөгҖӮйӮЈд№Ҳд»Җд№ҲжҳҜзЁҖз–Ҹзҹ©йҳөе‘ўпјҹеҰӮжһңеңЁзҹ©йҳөдёӯпјҢеӨҡж•°зҡ„е…ғзҙ дёә0пјҢйҖҡеёёи®Өдёәйқһйӣ¶е…ғзҙ жҜ”дёҠзҹ©йҳөжүҖжңүе…ғзҙ зҡ„еҖје°ҸдәҺзӯүдәҺ0.05ж—¶пјҢеҲҷз§°жӯӨзҹ©йҳөдёәзЁҖз–Ҹзҹ©йҳөпјҲsparse matrixпјүгҖӮжңүж—¶еҖҷдёәдәҶиҠӮзңҒеӯҳеӮЁз©әй—ҙпјҢжҲ‘们еҸҜд»ҘеҜ№иҝҷзұ»зҹ©йҳөиҝӣиЎҢеҺӢзј©еӯҳеӮЁгҖӮжүҖи°“еҺӢзј©еӯҳеӮЁжҳҜжҢҮеҜ№еӨҡдёӘеҖјзӣёеҗҢзҡ„е…ғеҸӘеҲҶй…ҚдёҖдёӘеӯҳеӮЁз©әй—ҙпјҢеҜ№йӣ¶е…ғдёҚеҲҶй…Қз©әй—ҙгҖӮ
дәҶи§ЈдәҶиҝҷдәӣпјҢжҲ‘们еҰӮдҪ•жқҘиҝӣиЎҢзЁҖз–Ҹзҹ©йҳөзҡ„еҺӢзј©еӯҳеӮЁе‘ўпјҹжҢүз…§еҺӢзј©еӯҳеӮЁзҡ„жҰӮеҝөпјҢжҲ‘们еҸӘеӯҳйқһйӣ¶е…ғзҙ гҖӮдҪҶжҳҜпјҢжҲ‘们йҷӨдәҶиҰҒеӯҳеӮЁе®ғзҡ„еҖјд»ҘеӨ–пјҢжҲ‘们иҝҳиҰҒи®°дёӢе…¶иЎҢе’ҢеҲ—зҡ„еҖјгҖӮеӣ жӯӨпјҢжҲ‘们еҸҜд»Ҙе®ҡд№үдёҖдёӘдёүе…ғз»„жқҘзЎ®е®ҡжҜҸдёӘйқһйӣ¶е…ғзҙ гҖӮ
дёүе…ғз»„з»“жһ„е®ҡд№үд»Јз Ғпјҡ
template<class T>
struct Triple //дёүе…ғз»„
{
T _value;
size_t _row;
size_t _col;
Triple(const T& value=T(),size_t row=0,size_t col=0)
:_value(value)
,_row(row)
,_col(col)
{}
};иҪ¬зҪ®иҝҗз®—жҳҜдёҖз§ҚжңҖз®ҖеҚ•зҡ„зҹ©йҳөиҝҗз®—гҖӮеҜ№дәҺдёҖдёӘm*nзҡ„зҹ©йҳөпјҢе®ғзҡ„иҪ¬зҪ®зҹ©йҳөеҲҷжҳҜn*mзҡ„зҹ©йҳөгҖӮжҳҫ然пјҢдёҖдёӘзЁҖз–Ҹзҹ©йҳөзҡ„иҪ¬зҪ®д»ҚжҳҜзЁҖз–Ҹзҹ©йҳөгҖӮ
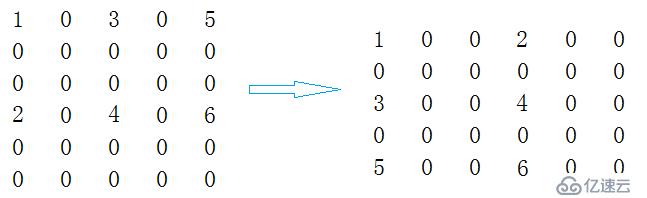
йӮЈд№ҲеҲ©з”Ёдёүе…ғз»„зҡ„еҺӢзј©еӯҳеӮЁжҲ‘们еә”иҜҘеҰӮдҪ•жқҘиҝӣиЎҢиҪ¬зҪ®е‘ўпјҹ
First>>е°Ҷзҹ©йҳөзҡ„иЎҢеҲ—еҖјиҝӣиЎҢдәӨжҚўгҖӮ
Second>>е°Ҷдёүе…ғз»„дёӯзҡ„iе’Ңjзҡ„еҖјиҝӣиЎҢдәӨжҚўгҖӮ
Third>>йҮҚж–°жҺ’еҲ—дёүе…ғз»„зҡ„дҪҚзҪ®еҚіеҸҜгҖӮеҚіжҢүз…§еҺҹе§Ӣзҹ©йҳөзҡ„еҲ—еәҸиҝӣиЎҢиҪ¬зҪ®пјҢеҜ№еҺҹе§Ӣдёүе…ғз»„иҝӣиЎҢжү«жҸҸдёҖйҒҚгҖӮ
зҹ©йҳөе®ҡд№үеҸҠиҪ¬зҪ®пјҡ
template<class T>
class SparseMatrix
{
public:
SparseMatrix(T* a,size_t m,size_t n,const T& invalid)
:_rowsize(m)
,_colsize(n)
,_invalid(invalid)
{
for(size_t i=0; i<m; i++)
{
for(size_t j=0; j<n; j++)
{
if(a[i*n+j]!=invalid)
{
_a.push_back(Triple<T>(a[i*n+j],i,j));
}
}
}
}
SparseMatrix()
:_rowsize(0)
,_colsize(0)
{}
void Display()//жү“еҚ°зҹ©йҳө
{
size_t index=0;
for(size_t i=0; i<_rowsize; i++)
{
for(size_t j=0; j<_colsize; j++)
{
if(index<_a.size() && _a[index]._row==i && _a[index]._col==j)
{
cout<<_a[index]._value<<" ";
index++;
}
else
{
cout<<_invalid<<" ";
}
}
cout<<endl;
}
}
SparseMatrix<T> Transport()
{
SparseMatrix<T> tmp;
tmp._colsize=_rowsize;
tmp._rowsize=_colsize;
tmp._invalid=_invalid;
for(size_t i=0; i<_colsize; i++) //йҒҚеҺҶжҜҸдёҖеҲ—
{
size_t index=0;
while(index<_a.size()) //йҒҚеҺҶеҺҹе§Ӣдёүе…ғз»„
{
if(_a[index]._col==i) //иӢҘдёӨиҖ…зӣёзӯү
{
Triple<T> t( _a[index]._value,_a[index]._col, _a[index]._row);
tmp._a.push_back(t);;//еӯҳе…Ҙж–°зҡ„дёүе…ғз»„
/*Triple<T> tp;
tp._col = _a[index]._row;
tp._row = _a[index]._col;
tp._value = _a[index]._value;
tmp._a.push_back(tp);*/
}
index++;
}
}
return tmp;
}
protected:
vector<Triple<T> > _a;
size_t _rowsize;
size_t _colsize;
T _invalid;
};дёҠиҝ°з®—жі•зҡ„ж—¶й—ҙеӨҚжқӮеәҰжҳҜOпјҲзҹ©йҳөзҡ„еҲ—ж•°*йқһйӣ¶е…ғзҙ дёӘж•°пјүгҖӮеҰӮжһңе…ғзҙ еҫҲеӨҡе°ұдјҡжөӘиҙ№еҫҲеӨҡзҡ„ж—¶й—ҙгҖӮйӮЈд№ҲпјҢеҸҜдёҚеҸҜд»ҘиҝӣиЎҢдјҳеҢ–е‘ўпјҹдёӢйқўжҲ‘们пјҢйҮҮеҸ–дёҖз§Қд»Ҙз©әй—ҙжҚўж—¶й—ҙзҡ„з®—жі•пјҢд№ҹе°ұжҳҜйҖҡеёёжүҖиҜҙзҡ„еҝ«йҖҹиҪ¬зҪ®гҖӮе®ғзҡ„з®—жі•жҳҜеҰӮдҪ•е®һзҺ°зҡ„е‘ўпјҹ
жҲ‘们еҸҜд»ҘйҮҮз”ЁдёӨдёӘж•°з»„жқҘиҝӣиЎҢеӯҳж”ҫжҜҸдёҖеҲ—дёӯйқһйӣ¶е…ғзҙ зҡ„дёӘж•°д»ҘеҸҠжҜҸдёҖеҲ—第дёҖдёӘйқһйӣ¶е…ғзҙ зҡ„дҪҚзҪ®гҖӮ

иҝҷж ·е°ұеҸҜд»Ҙеҫ—еҲ°иҪ¬зҪ®еҗҺзҡ„зҹ©йҳөзҡ„дёүе…ғз»„гҖӮ
еҝ«йҖҹиҪ¬зҪ®з®—жі•д»Јз Ғе®һзҺ°:
SparseMatrix<T> FastTransport()
{
SparseMatrix<T> tmp;
tmp._colsize=_rowsize;
tmp._rowsize=_colsize;
tmp._invalid=_invalid;
int *rowcounts=new int[tmp._rowsize];//жҜҸдёҖеҲ—дёӯйқһйӣ¶е…ғзҙ зҡ„дёӘж•°
int *rowstart=new int[tmp._rowsize];//жҜҸдёҖеҲ—第дёҖдёӘйқһйӣ¶е…ғзҙ еңЁдёүе…ғз»„дёӯзҡ„дҪҚзҪ®
memset(rowcounts,0,(sizeof(int)* _colsize));//еҲқе§ӢеҢ–
memset(rowstart,0,(sizeof(int)* _colsize));
size_t index=0;
while(index<_a.size())
{
rowcounts[_a[index]._col]++; //йҒҚеҺҶе°ҶжҜҸдёҖеҲ—зҡ„йқһйӣ¶е…ғзҙ дёӘж•°еӯҳе…Ҙrowcounts
++index;
}
rowstart[0]=0;
for(size_t i=1; i<_colsize; i++)
{
rowstart[i]=rowstart[i-1]+rowcounts[i-1]; //е°ҶжҜҸдёҖеҲ—йқһйӣ¶е…ғзҙ зҡ„иө·е§ӢдҪҚзҪ®еӯҳе…Ҙrowsart
}
index=0;
tmp._a.resize(_a.size());
while(index<_a.size())
{
size_t rowIndex=_a[index]._col;
int &start=rowstart[rowIndex];
Triple<T> tp;
tp._col = _a[index]._row;
tp._row = _a[index]._col;
tp._value = _a[index]._value;
tmp._a[start++]=tp;
index++;
}
return tmp;
}иҝҷж ·зҡ„ж—¶й—ҙеӨҚжқӮеәҰе°ұжҳҜOпјҲеҲ—ж•°+йқһйӣ¶е…ғзҙ дёӘж•°пјүгҖӮ
е…ҚиҙЈеЈ°жҳҺпјҡжң¬з«ҷеҸ‘еёғзҡ„еҶ…е®№пјҲеӣҫзүҮгҖҒи§Ҷйў‘е’Ңж–Үеӯ—пјүд»ҘеҺҹеҲӣгҖҒиҪ¬иҪҪе’ҢеҲҶдә«дёәдё»пјҢж–Үз« и§ӮзӮ№дёҚд»ЈиЎЁжң¬зҪ‘з«ҷз«ӢеңәпјҢеҰӮжһңж¶үеҸҠдҫөжқғиҜ·иҒ”зі»з«ҷй•ҝйӮ®з®ұпјҡis@yisu.comиҝӣиЎҢдёҫжҠҘпјҢ并жҸҗдҫӣзӣёе…іиҜҒжҚ®пјҢдёҖз»ҸжҹҘе®һпјҢе°Ҷз«ӢеҲ»еҲ йҷӨж¶үе«ҢдҫөжқғеҶ…е®№гҖӮ
жӮЁеҘҪпјҢзҷ»еҪ•еҗҺжүҚиғҪдёӢи®ўеҚ•е“ҰпјҒ