您好,登录后才能下订单哦!
密码登录
登录注册
点击 登录注册 即表示同意《亿速云用户服务条款》
1. 概述
本设计采用FPGA技术,将CMOS摄像头(LVDS接口)的视频数据经过采集、存储、帧率转换及格式转换,最终通过USB2.0接口显示在电脑屏幕上。
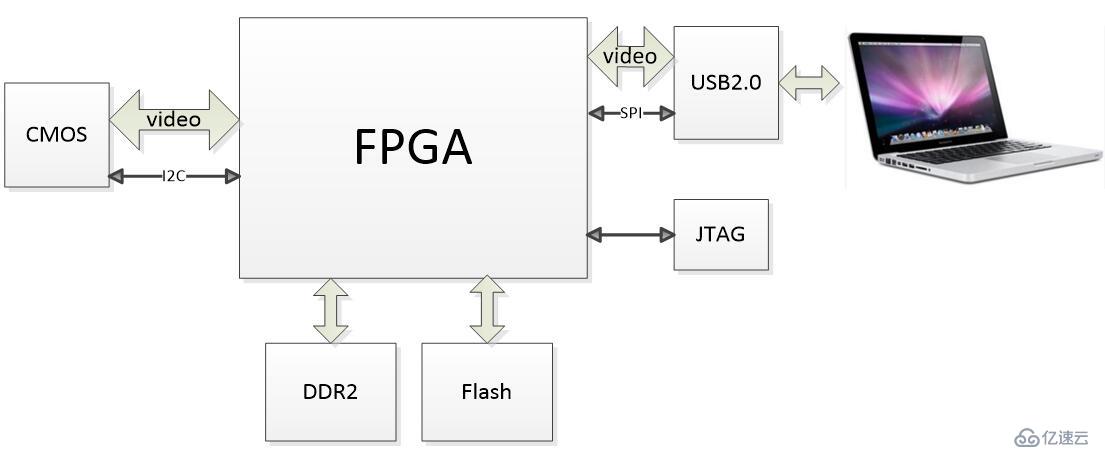
2. 硬件系统框图
CMOS采用一款全局曝光芯片,FPGA采用ALTERA公司的CYCLONE IV,FLASH采用EPCS64,DDR2采用Hynix公司的1Gb内存条,USB2.0采用Cypress公司的68013芯片。
3. FPGA逻辑框图
FPGA各部分逻辑模块如下图所示:
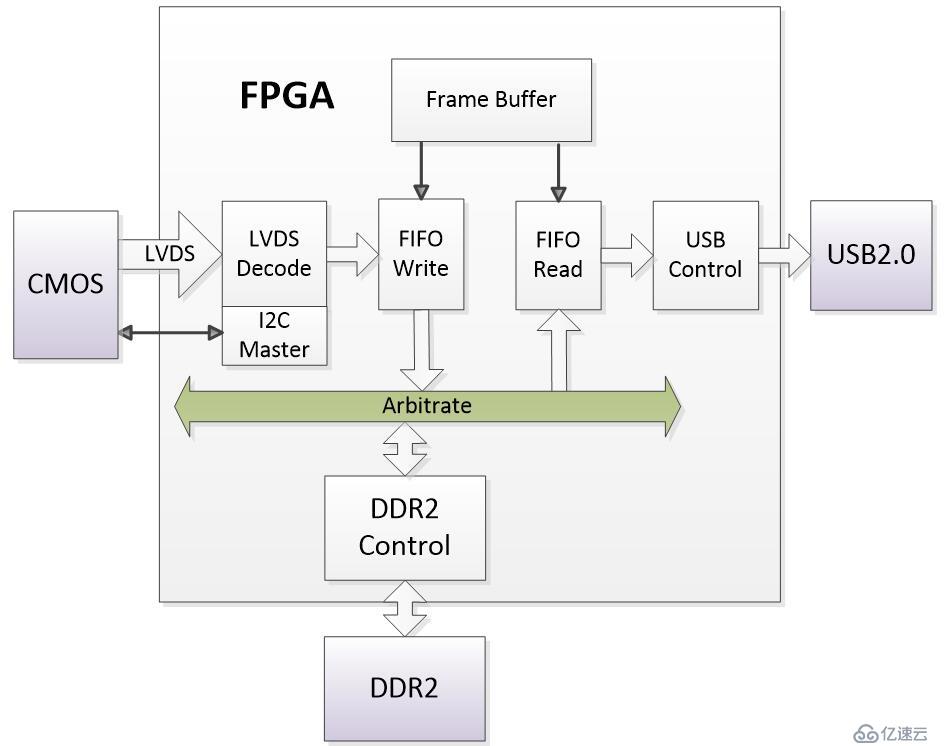
LVDS Decode,解码CMOS摄像头视频数据;
I2C Master,配置CMOS芯片;
DDR2 Control,配置与控制DDR2芯片组,实现读写仲裁;
FIFO Write,将采集到的视频数据跨时钟域地写进DDR2中;
FIFO Read,将DDR2中的数据跨时钟域地读出给后续图像处理模块;
Frame Buffer,负责FIFO Write和FIFO Read的调度,实现帧率转换;
USB Control,接受USB PHY的请求,通过FIFO Read向DDR2索取数据,并自定义打包发送给USB PHY芯片。
4. 全局曝光
全局曝光是针对逐行曝光的改进,在逐行曝光下,sensor是按照行为单位进行逐行曝光,这样当被摄物体和sensor存在高速的相对运动时,图像会发生形状和颜色的变形,如下图所示:

而全局曝光则是以帧为单位进行曝光,可以拍摄到高速运动的物体且没有变形。
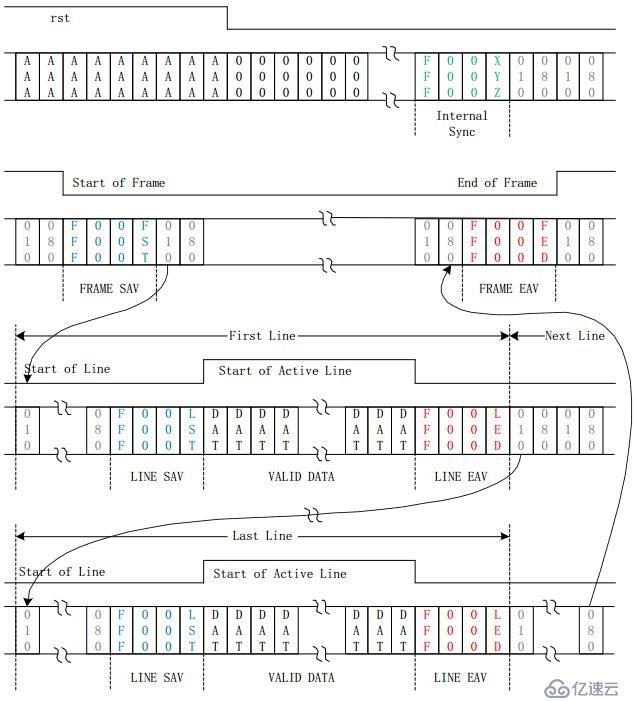
5. LVDS解码
摄像头芯片提供差分串行接口(LVDS),支持1/2/4个Data lane来传输图像8/10/12 bit数据。这里以4个data lane,同步信号内嵌的模式为例,介绍其传输时序。
6. CMOS配置
CMOS sensor支持最高130万像素,240帧的视频输出。
SpiWriteRegister(0x01,0x03,0x01);// soft reset SpiWriteRegister(0x01,0x00,0x00);SpiWriteRegister(0x30,0x34,0x01);SpiWriteRegister(0x30,0x35,0xc2); SpiWriteRegister(0x33,0x0b,0x4c);SpiWriteRegister(0x36,0x64,0x09);SpiWriteRegister(0x36,0x38,0x82); SpiWriteRegister(0x3d,0x08,0x00);SpiWriteRegister(0x36,0x40,0x03);SpiWriteRegister(0x36,0x28,0x07); SpiWriteRegister(0x32,0x05,0x93); //rnc SpiWriteRegister(0x36,0x20,0x42);SpiWriteRegister(0x36,0x23,0x06);SpiWriteRegister(0x36,0x27,0x02); SpiWriteRegister(0x36,0x21,0x28);SpiWriteRegister(0x36,0x3b,0x00);SpiWriteRegister(0x36,0x33,0x24); SpiWriteRegister(0x36,0x34,0xff); //fpn optimize SpiWriteRegister(0x34,0x16,0x10);SpiWriteRegister(0x3e,0x03,0x0b);SpiWriteRegister(0x3e,0x08,0x03); SpiWriteRegister(0x3e,0x09,0x20);SpiWriteRegister(0x3e,0x01,0x23); SpiWriteRegister(0x3e,0x14,0xb0);SpiWriteRegister(0x33,0x0b,0x40);SpiWriteRegister(0x3e,0x08,0x3f); SpiWriteRegister(0x36,0x3b,0x80);SpiWriteRegister(0x36,0x23,0x07);SpiWriteRegister(0x50,0x00,0x01); SpiWriteRegister(0x3e,0x01,0x00);SpiWriteRegister(0x3e,0x02,0x30);SpiWriteRegister(0x32,0x0c,0x05); SpiWriteRegister(0x32,0x0d,0x46);SpiWriteRegister(0x32,0x0e,0x02); SpiWriteRegister(0x32,0x0f,0x58);SpiWriteRegister(0x36,0x38,0x85);SpiWriteRegister(0x33,0x06,0x50); SpiWriteRegister(0x33,0x0b,0x68);SpiWriteRegister(0x33,0x08,0x10);SpiWriteRegister(0x3e,0x01,0x00); SpiWriteRegister(0x36,0x3b,0x00);SpiWriteRegister(0x36,0x63,0xf8);SpiWriteRegister(0x36,0x64,0x0a); SpiWriteRegister(0x36,0x33,0x27);SpiWriteRegister(0x30,0x3a,0x3a); SpiWriteRegister(0x30,0x3a,0x3a);SpiWriteRegister(0x30,0x3a,0x3a);SpiWriteRegister(0x30,0x3a,0x3a); SpiWriteRegister(0x36,0x3b,0x00);SpiWriteRegister(0x34,0x16,0x38);SpiWriteRegister(0x3e,0x08,0x23); SpiWriteRegister(0x3c,0x00,0x41); //FIFO RESET for mipi SpiWriteRegister(0x30,0x19,0x00); SpiWriteRegister(0x30,0x31,0x0a); // 10bit SpiWriteRegister(0x30,0x00,0x00);SpiWriteRegister(0x30,0x01,0x00);SpiWriteRegister(0x30,0x39,0x20); SpiWriteRegister(0x30,0x3a,0x31);SpiWriteRegister(0x30,0x3b,0x02);SpiWriteRegister(0x30,0x3c,0x08); SpiWriteRegister(0x4b,0x00,0xa2); //must SpiWriteRegister(0x30,0x22,0x19); //must SpiWriteRegister(0x30,0x3f,0x01); //must SpiWriteRegister(0x30,0x30,0x04); //must SpiWriteRegister(0x30,0x2b,0xa0); //must SpiWriteRegister(0x36,0x20,0x43);SpiWriteRegister(0x36,0x21,0x18);SpiWriteRegister(0x45,0x01,0xc0); SpiWriteRegister(0x45,0x02,0x16); //br recieve inv off SpiWriteRegister(0x36,0x23,0x07);SpiWriteRegister(0x50,0x00,0x01);SpiWriteRegister(0x36,0x20,0x43); SpiWriteRegister(0x33,0x00,0x30);SpiWriteRegister(0x3e,0x01,0x14);SpiWriteRegister(0x36,0x3b,0x80); SpiWriteRegister(0x36,0x64,0x0a);SpiWriteRegister(0x3e,0x08,0x23); SpiWriteRegister(0x34,0x16,0x00);SpiWriteRegister(0x36,0x33,0x20); SpiWriteRegister(0x36,0x33,0x23);SpiWriteRegister(0x32,0x11,0x0c);SpiWriteRegister(0x3e,0x0f,0x05); SpiWriteRegister(0x36,0x3b,0x08); //fpn SpiWriteRegister(0x36,0x33,0x22); //nvdd SpiWriteRegister(0x33,0x02,0x0c);//rst go low SpiWriteRegister(0x33,0x83,0x0a);// pbias en rise edge SpiWriteRegister(0x36,0x23,0x04); SpiWriteRegister(0x33,0x82,0x0f); //sa fall edge SpiWriteRegister(0x3e,0x0f,0x84); //gain SpiWriteRegister(0x3e,0x0e,0x03); //gain SpiWriteRegister(0x3e,0x08,0x27);SpiWriteRegister(0x3e,0x08,0x23);SpiWriteRegister(0x36,0x64,0x05); SpiWriteRegister(0x33,0x0b,0x68); SpiWriteRegister(0x36,0x38,0x84);SpiWriteRegister(0x5b,0x00,0x02);SpiWriteRegister(0x5b,0x01,0x03); SpiWriteRegister(0x5b,0x02,0x01);SpiWriteRegister(0x5b,0x03,0x01);SpiWriteRegister(0x36,0x3b,0x02); SpiWriteRegister(0x36,0x32,0x54);SpiWriteRegister(0x36,0x33,0x32);SpiWriteRegister(0x34,0x16,0x0e); SpiWriteRegister(0x36,0x64,0x0e);SpiWriteRegister(0x36,0x63,0x88);SpiWriteRegister(0x33,0x0b,0x50); SpiWriteRegister(0x36,0x22,0x06); //blksun SpiWriteRegister(0x36,0x30,0xb3);SpiWriteRegister(0x34,0x16,0x11);SpiWriteRegister(0x01,0x00,0x01);
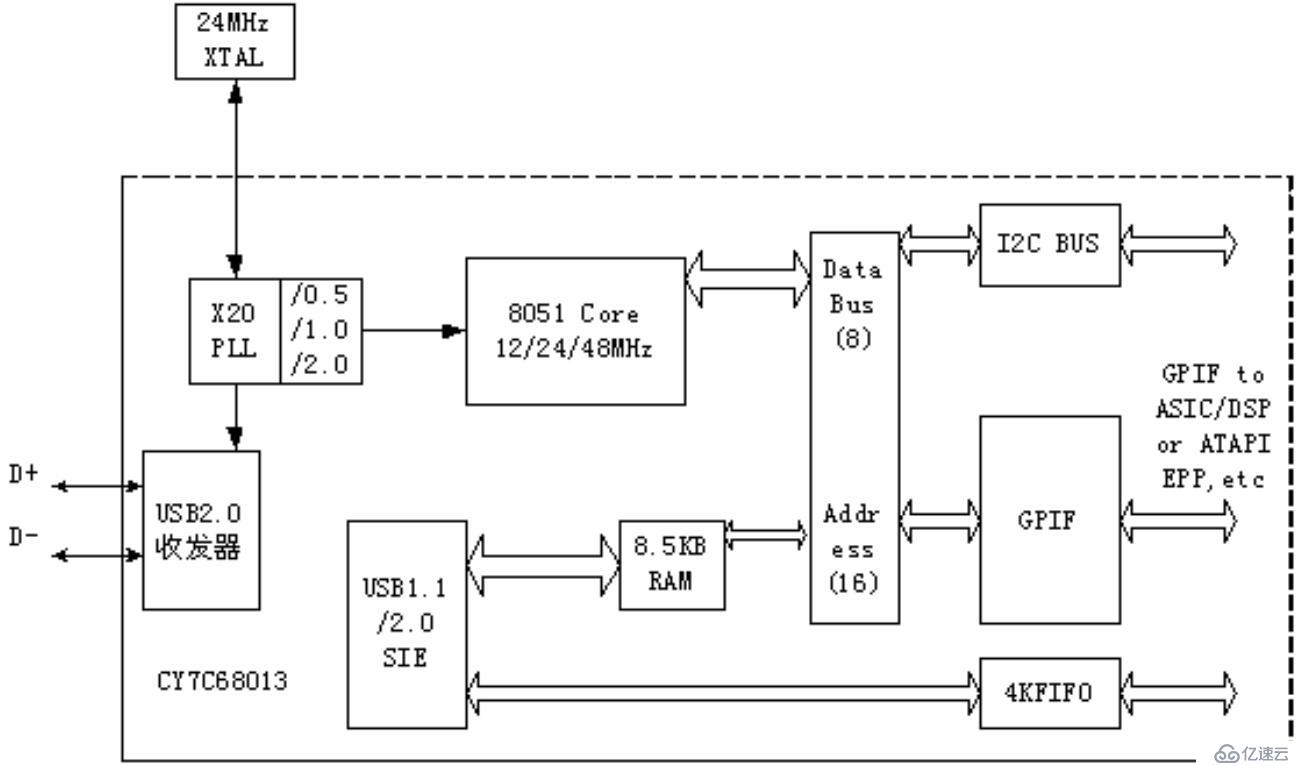
7. USB2.0 PHY
Cypress公司的EZ-USB FX2是世界上第一款集成USB2.0的微处理器,它集成了USB2.0收发器、SIE(串行接口引擎)、增强的8051微控制器和可编程的外围接口。
8. USB Slave FIFO传输
当有一个与芯片相连主控只需要利用FX2做为一个USB2.0接口而实现与主机的高速通讯,而它本身又能够提供满足Slave FIFO要求的传输时序时,可采用Slave FIFO传输方式。
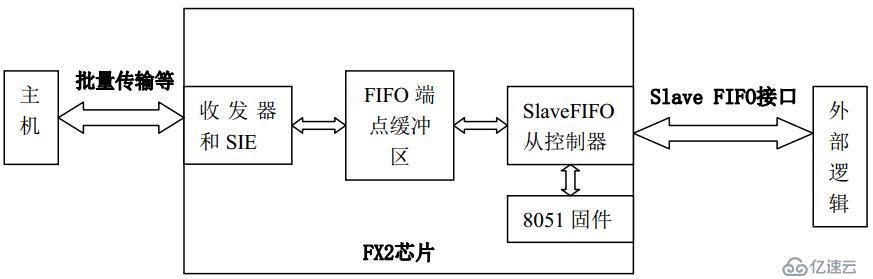
这种方式下,内嵌的8051固件只负责配置Slave FIFO相关的寄存器以及控制FX2何时工作在Slave FIFO模式下。
在Slave FIFO模式下,主控逻辑与FX2的连接如下图所示:
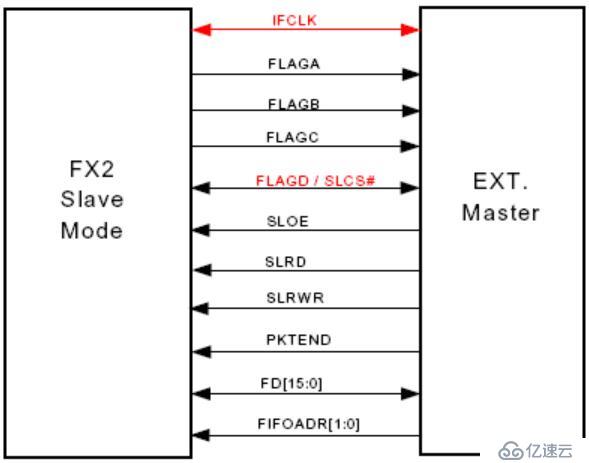
IFCLK: FX2 输出的时钟,可做为通讯的同步时钟
FLAGA/FLAGB/FLAGC/FLAGD: FX2 输出的FIFO状态信息,如满,空等
SLCS:FIFO的片选信号,外部逻辑控制,当 SLCS 输出高时,不可进行数据传输
SLOE:FIFO输出使能,外部逻辑控制,当 SLOE 无效时,数据线不输出有效数据
SLRD:FIFO 读信号,外部逻辑控制,同步读时,FIFO指针在SLRD 有效时的每个IFCLK的上升沿递增,异步读时, FIFO 读指针在 SLRD 的每个有效—无效的跳变沿时递增
SLWR:FIFO 写信号,外部逻辑控制,同步写时,在 SLWR 有效时的每个 IFCLK 的上升沿时数据被写入, FIFO指针递增,异步写时,在SLWR的每个有效—无效的跳变沿时数据被写入,FIFO写指针递增
PKTEND:包结束信号,外部逻辑控制,在正常情况下,外部逻辑向 FX2 的 FIFO 中写数,当写入FIFO端点的字节数等于FX2固件设定的包大小时,数据将自动被打成一包进行传输,但有时外部逻辑可能需要传输一个字节数小于 FX2 固件设定的包大小的包,这时它只需在写入一定数目的字节后,声明此信号,此时 FX2 硬件不管外部逻辑写入了多少字节,都自动将之打成一包进行传输
FD[15:0]:数据线;
FIFOADR[1:0]:选择四个 FIFO 端点的地址线,外部逻辑控制
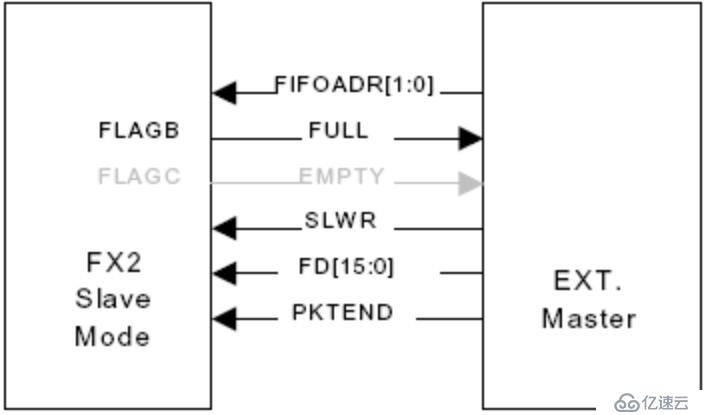
这里设置FIFO为异步写模式,连接的接口如下图所示:
标准的异步写模式的状态机如下图所示:
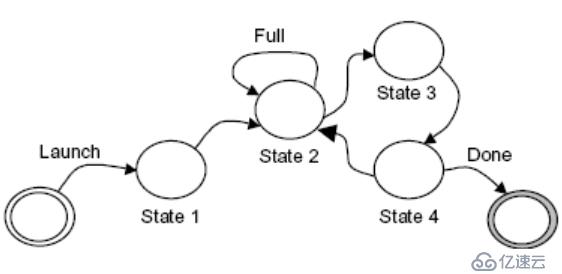
IDLE:当写事件发生时,进入状态1;
状态1:使FIFOADR[1:0]指向IN FIFO,进入状态2;
状态2:如果FIFO满,进入等待,否则进入状态3;
状态3:获取数据,使能SLWR,再无效,进入状态4;
状态4:如需继续传递数据,进入状态2,否则进入IDLE。
9. USB驱动开发
开发EZ-USB驱动程序需要用到微软的WDW DDK和VC++,DDK可从http://www.microsoft.com/hwdev获得。这里我们直接使用Cypress提供的一套驱动程序,足以满足一般项目需求。以WIN7 64位驱动为例,需以下三个文件:
cyusb.sys、cyusbfx1_fx2lp.cat、cyusbfx1_fx2lp.inf。
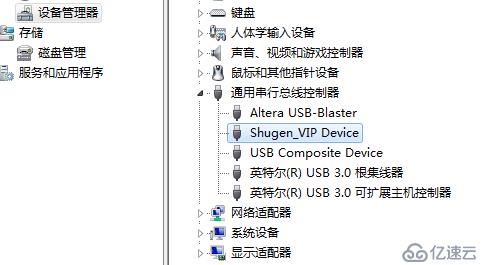
其中需要我们修改的是cyusbfx1_fx2lp.inf文件,在其中添加我们的PID/VID和描述符(Shugen_VIP Device)。
;for x64 platforms
[Device.NTamd64]
%VID_2017&PID_0328.DeviceDesc%=CyUsb, USB\VID_2017&PID_0328
[Strings]
CYUSB_Provider = "Cypress"
CYUSB_Company = "Cypress Semiconductor Corporation"
CYUSB_Description = "Cypress Generic USB Driver"
CYUSB_DisplayName = "Cypress USB Generic"
CYUSB_Install = "Cypress CYUSB Driver Installation Disk"
VID_2017&PID_0328.DeviceDesc="Shugen_VIP Device"
CYUSB.GUID="{AE18AA60-7F6A-11d4-97DD-00010229B959}"
CYUSB_Unused = "."在设备管理器中安装好的驱动如下:
10. 固件程序开发
USB2.0的固件程序开发在KEIL下完成,在工程中添加EZUSB的USBJmp.OBJ和EZUSB.LIB两个目标和库文件,工程下有三个重要源文件:
fw.c, FirmWare的缩写,USB协议方面的通信都是在这里完成的,包括上电枚举、重枚举、唤醒及调用用户程序等。
periph.c,用户代码在这里完成,Cypress已经为我们搭好了框架。文件中包括void TD_Init(void)、void TD_Poll(void)、BOOL DR_VendorCmnd(void)、void ISR_Ep0in(void) interrupt 0~void ISR_Ep8inout(void) interrupt 0 函数。
dscr.51,USB描述符文件,包括了设备描述符、接口描述符、端点描述符、字符串等。
这里为了实现USB PHY芯片和FPGA的同步,需要用视频的场同步信号vsync来做同步,使用68013的INT0引脚实现中断触发,具体中断函数如下:
void ISR_EXTR0(void) interrupt 0 //using 0
{
if(frame_sign == 1){
PA1 = 1; //Enable p_w_picpath input
}
else
{
PA1 = 0; //Disable p_w_picpath input
//Reset FIFO of EDP2
SYNCDELAY;
FIFORESET = 0x80;// activate NAK-ALL to avoid race conditions
SYNCDELAY;
FIFORESET = 0x02;// reset, FIFO 2
SYNCDELAY;
FIFORESET = 0x00;// deactivate NAK-AL
SYNCDELAY;
}
}设计好代码后,编译生成HEX文件(用于在线调试,下载到ram中)和IIC文件(用于固化EEPROM)。
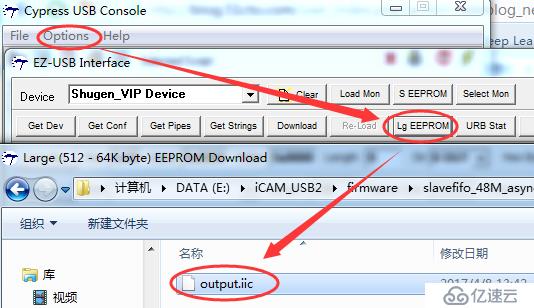
11. 固化代码
将KEIL编译生成的IIC文件固化到EEPROM中需要使用CYPRESS提供的CyConsole工具,具体使用方法如下图所示:
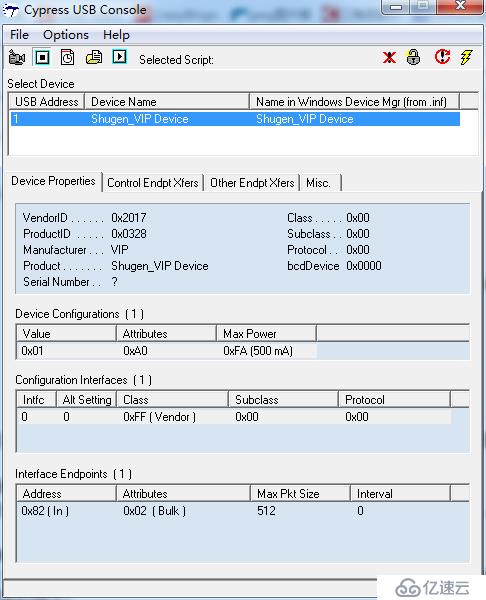
如果固化成功,重启后可以在CyConsole中看到USB2.0设备的具体信息:
12. 上位机DEMO软件
在Windows下可以使用VC++开发应用软件,在设计68013上位机程序的过程中,需要用到CPYRESS官方提供的API函数和驱动程序。开发包地址如下:
http://www.cypress.com/documentation/software-and-drivers/suiteusb-34-usb-development-tools-visual-studio
支持的操作系统:
Windows 2000(w2K) Windows XP (wxp) Windows Vista (wlh) Windows 7
支持的CPU类型:
x86(32bit-i386) x64(64bit-amd64)
开发过程需要使用cyapi.h和cyapi.lib两文件。CyAPI 控制函数类主要包括 8 个控制类:
传输端点控制类 CCyBulkEndPoint、控制传输端点类CCyControlEndPoint 、 中 断 传 输 端 点 控 制 类 CCyInterruptEndPoint 、 同 步 传 输 端 点 控 制 类CCyIsocEndPoint、设备控制类 CCyUSBDevice、配置信息类 CCyUSBConfig、端点控制类 CCyUSBEndPoint和接口控制类 CCyUSBInterface。具体的使用方法可以参考Cypress CyAPI Programmer's Reference
13. 最终结果
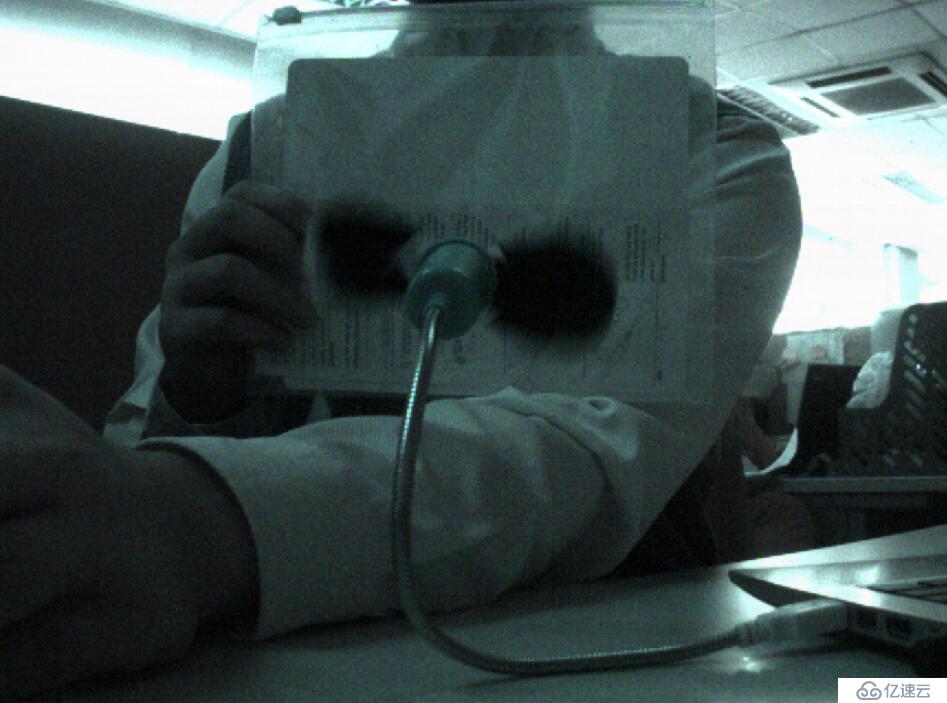
下图为用手机拍摄的风扇的图片,已经完全看不到扇叶的形状。

下图为设计的板卡拍摄的图片,从图中可以看出扇叶的形状,尽管风扇在高速旋转。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。